

q - Rosario Toscano - Free
q - Rosario Toscano - Free
q - Rosario Toscano - Free

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
where [ ] T<br />
q = q1<br />
q2<br />
q3<br />
q is the vector of decision variables, s is the Laplace variable, S(s,q) is<br />
4<br />
the sensitivity function defined as S(s,q) = 1/(1+L(s,q)), T(s,q) is the closed-loop system defined<br />
as T(s,q) = L(s,q)/(1+L(s,q)), L(s,q) is the open-loop transfer function defined as L(s,q) =<br />
G(s)K(s,q) where G(s) is the transfer function of the system to be controlled and K(s,q) is the<br />
transfer function of the PID controller which depends upon the decision variable as follows:<br />
q3<br />
q ⎛ 1 10 s ⎞<br />
1 ( s,<br />
q)<br />
= 10 ⎜<br />
⎜1+<br />
+<br />
⎟<br />
(38)<br />
q2<br />
( q3<br />
− 4 )<br />
⎝ 10 s 1+<br />
10 s ⎠<br />
K q<br />
Note that the relationship between the decision variables of the optimization problem and the<br />
parameters of the PID controller are defined as:<br />
K = 10<br />
=<br />
(39)<br />
p<br />
q1<br />
q2<br />
q3<br />
q4<br />
, Ti<br />
= 10 , Td<br />
= 10 , N 10<br />
This is done to ensure a broader parameter space of (Kp, Ti, Td, N). The frequency-dependent<br />
weighting functions WS(s) and WT(s) are set in order to meet the performance specifications of the<br />
closed-loop system. The optimization problem (37), has been solved for the magnetic levitation<br />
system described in Sugi, Simizu & Imura, (1993). The process model is defined as:<br />
7.<br />
147<br />
G ( s)<br />
=<br />
(40)<br />
( s − 22.<br />
55)(<br />
s + 20.<br />
9)(<br />
s + 13.<br />
99)<br />
The frequency-dependent weighting functions WS(s) and WT(s) are respectively given as:<br />
5<br />
43.<br />
867(<br />
s + 0.<br />
066)(<br />
s + 31.<br />
4)(<br />
s + 88)<br />
S ( s)<br />
= , W ( s)<br />
=<br />
(41)<br />
4 2<br />
s + 0.<br />
1<br />
( s + 10 )<br />
W T<br />
The search space is: 2 ≤ q 1 ≤ 4,<br />
−1<br />
≤ q2<br />
≤1,<br />
−1<br />
≤ q3<br />
≤ 1,<br />
1 ≤ q4<br />
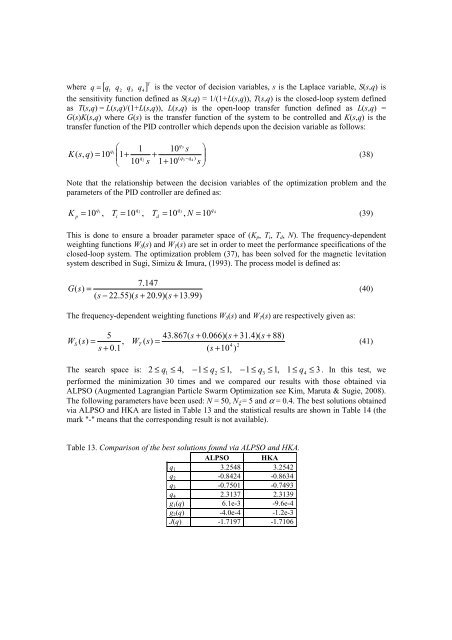
≤ 3 . In this test, we<br />
performed the minimization 30 times and we compared our results with those obtained via<br />
ALPSO (Augmented Lagrangian Particle Swarm Optimization see Kim, Maruta & Sugie, 2008).<br />
The following parameters have been used: N = 50, Nξ = 5 and α = 0.4. The best solutions obtained<br />
via ALPSO and HKA are listed in Table 13 and the statistical results are shown in Table 14 (the<br />
mark "-" means that the corresponding result is not available).<br />
Table 13. Comparison of the best solutions found via ALPSO and HKA.<br />
ALPSO HKA<br />
q1 3.2548 3.2542<br />
q2 -0.8424 -0.8634<br />
q3 -0.7501 -0.7493<br />
q4 2.3137 2.3139<br />
g1(q) 6.1e-3 -9.6e-4<br />
g2(q) -4.0e-4 -1.2e-3<br />
J(q) -1.7197 -1.7106
