Simulation Fitting Method for Setting Motion Parameters of Robotic ...
Simulation Fitting Method for Setting Motion Parameters of Robotic ...
Simulation Fitting Method for Setting Motion Parameters of Robotic ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4<br />
3<br />
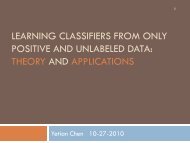
Fish wave<br />
Envelope curve<br />
2<br />
Lateral Displacement<br />
1<br />
0<br />
-1<br />
-2<br />
-3<br />
-4<br />
0 1 2 3 4 5 6 7<br />
Longitude Distance from Head<br />
Figure 1 Static fish wave<br />
Figure 2 Link-based robot fish<br />
make the machine swim like a fish, we should set parameters, such as angle at the joint, proportion<br />
<strong>of</strong> each rod, one segment <strong>of</strong> link, so that the link mimics fish’s shape as well as possible.<br />
3. Traditional strategy in fitting fishcurve with link<br />
Traditional method is widely used. It is simple, but there are also some flaws in it.<br />
3.1 Preparation <strong>for</strong> fitting fish curve<br />
Suppose the robot fish acts N times in a period with equal interval. Then, a period should be<br />
discretized into N time points. So at each point, fish wave degenerate into N static curves. We may<br />
call them fish curves.<br />
For 2/;i=0,1...N-1; <strong>for</strong>mula <strong>of</strong> fish curve i should be: