Simulation Fitting Method for Setting Motion Parameters of Robotic ...
Simulation Fitting Method for Setting Motion Parameters of Robotic ...
Simulation Fitting Method for Setting Motion Parameters of Robotic ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
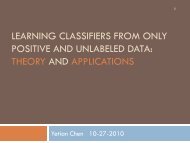
0.5<br />
Fish curve<br />
Link<br />
0<br />
Lateral Displacement<br />
-0.5<br />
-1<br />
-1.5<br />
-2<br />
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5<br />
Longitude Distance from Head<br />
Figure 4 Result by JLM<br />
and link and make the outcome minimum. However, there are even more problems in this method.<br />
First <strong>of</strong> all, there is no obvious guide <strong>for</strong> adjustment in intermediate states. So there is only one<br />
way to find the result, searching thoroughly. Then it causes another problem: high computational<br />
complexity, especially when there are many segments in the link. So we need to figure out another<br />
method.<br />
4 <strong>Simulation</strong> <strong>Fitting</strong> <strong>Method</strong><br />
It is necessary to find a method which can compromise between computational complexity<br />
and precision. Just as we borrow the structure <strong>of</strong> real fish to design robot fish, we can also borrow<br />
ideas from physics to reach our goal.<br />
4.1 Principle <strong>of</strong> the method<br />
The basic thought <strong>of</strong> SFM is simple: view the fishcurve and link as real objects, imagine a<br />
uni<strong>for</strong>m <strong>for</strong>ce field between them and let physic laws do the rest.<br />
As in Figure 5, a series <strong>of</strong> elastic ropes (shown as black lines) are attached between the link<br />
and fish curve. Suppose the ropes always satisfy Hook Law and tend to contract. Then, in an<br />
unstable state, rods are subjected to certain <strong>for</strong>ce and torque which drive them to translate and<br />
rotate. Under such effect, link moves to its target position and finally stops in a stable state. Now,<br />
the shape <strong>of</strong> the link is right <strong>for</strong> robot fish. All we need to do is to build a mathematic model,<br />
simulate the process and record the result.<br />
4.2 Physical modeling and analysis<br />
With the set scene, it is easy to analyze the system.<br />
4.2.1 Analyze single rod