

Autonomous Vehicles - KPIT
Autonomous Vehicles - KPIT
Autonomous Vehicles - KPIT

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
F. Intercontinental <strong>Autonomous</strong> Challenge<br />
The most challenging autonomous car<br />
journey was conducted by Parma's VISLAB<br />
(Visualization and Intelligent Systems<br />
Laboratory) in 2010. The journey was from<br />
Parma to Shanghai, and it took 100 days to<br />
cover 16,000 kms through nine countries. In<br />
Russia, the team gathered a record: 'The first<br />
autonomous vehicle which is ticketed by a<br />
traffic cop' [7].<br />
We can just have a look at some key<br />
characteristics of the vehicle, shown in Fig. 11<br />
that was used for road trip. The sensing<br />
system of the vehicle was based on cameras<br />
and laser scanners. 5 forward and 2 backward<br />
looking cameras were installed on the vehicle.<br />
4 laser scanners with different characteristics<br />
were placed around the vehicle. The obstacles<br />
and lane markings on the road were located by<br />
the forward and backward vision systems. In<br />
addition, the laser scanners available in the<br />
vehicle were used to detect vehicles in front<br />
and other vehicles [3].<br />
The full control of speed and steering of the<br />
vehicle is handled via CAN messages,<br />
through the x-by-wire equipped in the vehicle.<br />
Fig. 12 shows the TopCon steering, which is<br />
configured to capture commands from a CAN<br />
bus and control the steering. Fig.13 shows the<br />
VisLab board to interface the CAN bus with the<br />
gas control [3].<br />
Figure 11 Figure 12 Figure 13<br />
Figure11: One of the vehicles used during road trip [3]<br />
Figure12: The drive by-wire steering system [3]<br />
Figure13: The custom board controlling the engine [3]<br />
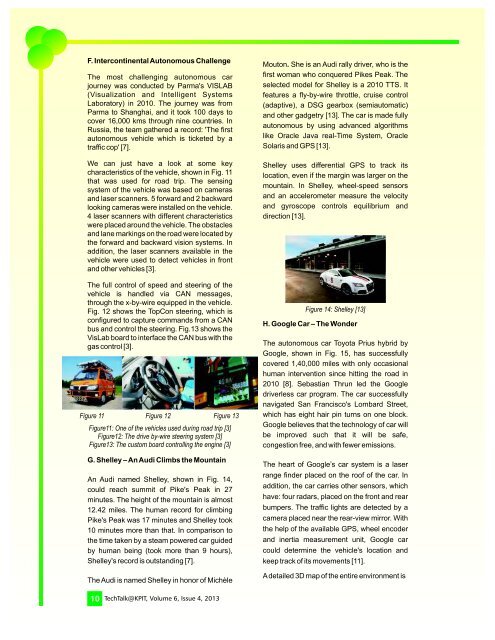
G. Shelley – An Audi Climbs the Mountain<br />
An Audi named Shelley, shown in Fig. 14,<br />
could reach summit of Pike's Peak in 27<br />
minutes. The height of the mountain is almost<br />
12.42 miles. The human record for climbing<br />
Pike's Peak was 17 minutes and Shelley took<br />
10 minutes more than that. In comparison to<br />
the time taken by a steam powered car guided<br />
by human being (took more than 9 hours),<br />
Shelley's record is outstanding [7].<br />
The Audi is named Shelley in honor of Michèle<br />
Mouton. She is an Audi rally driver, who is the<br />
first woman who conquered Pikes Peak. The<br />
selected model for Shelley is a 2010 TTS. It<br />
features a fly-by-wire throttle, cruise control<br />
(adaptive), a DSG gearbox (semiautomatic)<br />
and other gadgetry [13]. The car is made fully<br />
autonomous by using advanced algorithms<br />
like Oracle Java real-Time System, Oracle<br />
Solaris and GPS [13].<br />
Shelley uses differential GPS to track its<br />
location, even if the margin was larger on the<br />
mountain. In Shelley, wheel-speed sensors<br />
and an accelerometer measure the velocity<br />
and gyroscope controls equilibrium and<br />
direction [13].<br />
Figure 14: Shelley [13]<br />
H. Google Car – The Wonder<br />
The autonomous car Toyota Prius hybrid by<br />
Google, shown in Fig. 15, has successfully<br />
covered 1,40,000 miles with only occasional<br />
human intervention since hitting the road in<br />
2010 [8]. Sebastian Thrun led the Google<br />
driverless car program. The car successfully<br />
navigated San Francisco's Lombard Street,<br />
which has eight hair pin turns on one block.<br />
Google believes that the technology of car will<br />
be improved such that it will be safe,<br />
congestion free, and with fewer emissions.<br />
The heart of Google’s car system is a laser<br />
range finder placed on the roof of the car. In<br />
addition, the car carries other sensors, which<br />
have: four radars, placed on the front and rear<br />
bumpers. The traffic lights are detected by a<br />
camera placed near the rear-view mirror. With<br />
the help of the available GPS, wheel encoder<br />
and inertia measurement unit, Google car<br />
could determine the vehicle's location and<br />
keep track of its movements [11].<br />
A detailed 3D map of the entire environment is<br />
10 TechTalk@<strong>KPIT</strong>, Volume 6, Issue 4, 2013