

Autonomous Vehicles - KPIT
Autonomous Vehicles - KPIT
Autonomous Vehicles - KPIT

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
FORWARD OBSTACLE DETECTION<br />
AND AVOIDANCE<br />
Information about accident or<br />
traffic sent back to following<br />
vehicles using DSRC<br />
Figure 2: Forward Obstacle Detection and Avoidance [7]<br />
B. Approaching Emergency Vehicle<br />
Warning<br />
Vehicle to vehicle communication shall<br />
provide the information about an approaching<br />
emergency vehicle through traffic, as shown in<br />
Fig. 3. This would assist in clearing the street<br />
for the emergency vehicle thereby reducing<br />
the risk to other vehicles.<br />
Approaching Emergency<br />
vehicle warning<br />
Information about approachin<br />
emergency vehicle sent ahea<br />
through vehicles using DSRC<br />
Figure 3: Approaching Emergency Vehicle [7]<br />
C. Cooperative Adaptive Cruise Control<br />
When the car approaches a sharp curve, the<br />
communication system fitted with line of sight<br />
of radar warns the adaptive cruise control<br />
system of any slow moving vehicles just<br />
around the turn, as shown in Fig. 4.<br />
Figure 5: Self-Driving Requirements [8]<br />
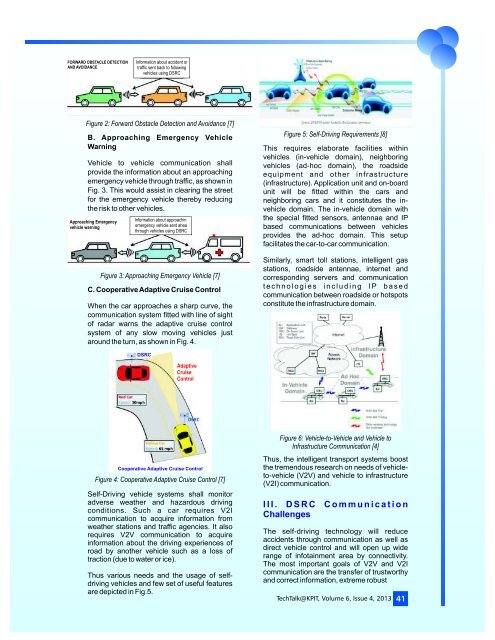
This requires elaborate facilities within<br />
vehicles (in-vehicle domain), neighboring<br />
vehicles (ad-hoc domain), the roadside<br />
equipment and other infrastructure<br />
(infrastructure). Application unit and on-board<br />
unit will be fitted within the cars and<br />
neighboring cars and it constitutes the invehicle<br />
domain. The in-vehicle domain with<br />
the special fitted sensors, antennae and IP<br />
based communications between vehicles<br />
provides the ad-hoc domain. This setup<br />
facilitates the car-to-car communication.<br />
Similarly, smart toll stations, intelligent gas<br />
stations, roadside antennae, internet and<br />
corresponding servers and communication<br />
t e c h n o l o g i e s i n c l u d i n g I P b a s e d<br />
communication between roadside or hotspots<br />
constitute the infrastructure domain.<br />
DSRC<br />
Adaptive<br />
Cruise<br />
Control<br />
Cooperative Adaptive Cruise Control<br />
Figure 4: Cooperative Adaptive Cruise Control [7]<br />
Self-Driving vehicle systems shall monitor<br />
adverse weather and hazardous driving<br />
conditions. Such a car requires V2I<br />
communication to acquire information from<br />
weather stations and traffic agencies. It also<br />
requires V2V communication to acquire<br />
information about the driving experiences of<br />
road by another vehicle such as a loss of<br />
traction (due to water or ice).<br />
Thus various needs and the usage of selfdriving<br />
vehicles and few set of useful features<br />
are depicted in Fig.5.<br />
Figure 6: Vehicle-to-Vehicle and Vehicle to<br />
Infrastructure Communication [4]<br />
Thus, the intelligent transport systems boost<br />
the tremendous research on needs of vehicleto-vehicle<br />
(V2V) and vehicle to infrastructure<br />
(V2I) communication.<br />
I I I . D S R C C o m m u n i c a t i o n<br />
Challenges<br />
The self-driving technology will reduce<br />
accidents through communication as well as<br />
direct vehicle control and will open up wide<br />
range of infotainment area by connectivity.<br />
The most important goals of V2V and V2I<br />
communication are the transfer of trustworthy<br />
and correct information, extreme robust<br />
TechTalk@<strong>KPIT</strong>, Volume 6, Issue 4, 2013 541