

Linear Matrix Inequalities in Control
Linear Matrix Inequalities in Control
Linear Matrix Inequalities in Control

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
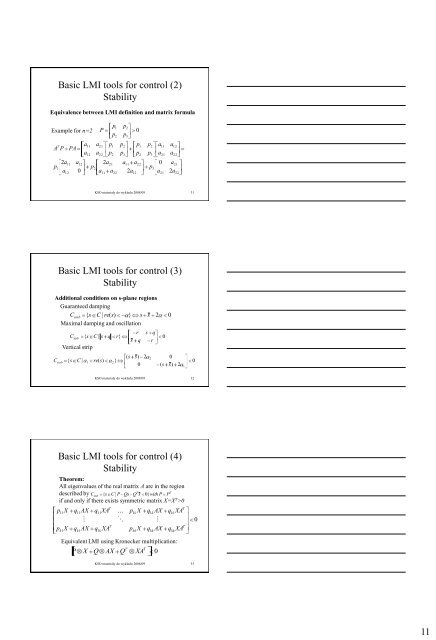
Basic LMI tools for control (2)<br />
Stability<br />
Equivalence between LMI def<strong>in</strong>ition and matrix formula<br />
p1<br />
p2<br />
Example for n=2 P<br />
0<br />
p p<br />
A T P PA<br />
2a<br />
p1<br />
a<br />
11<br />
12<br />
a12<br />
0<br />
a<br />
a<br />
11<br />
12<br />
a<br />
a<br />
21<br />
22<br />
11<br />
p1<br />
p<br />
2<br />
2<br />
2a21<br />
p2<br />
a a<br />
22<br />
p2<br />
p<br />
3<br />
3<br />
a11<br />
a<br />
2a<br />
12<br />
p1<br />
p<br />
2<br />
22<br />
p2<br />
p<br />
3<br />
a<br />
a<br />
11<br />
21<br />
0<br />
p3<br />
a<br />
21<br />
a<br />
a<br />
12<br />
22<br />
a<br />
2a<br />
21<br />
22<br />
KSO materiały do wykładu 2008/09 31<br />
Basic LMI tools for control (3)<br />
Stability<br />
Additional conditions on s-plane regions<br />
Guaranteed damp<strong>in</strong>g<br />
C stab<br />
{ s C | re(<br />
s)<br />
} s s 2 0<br />
Maximal damp<strong>in</strong>g and oscillation<br />
r s q<br />
C stab<br />
{ s C | s q r}<br />
0<br />
s q r<br />
Vertical strip<br />
( s s)<br />
2<br />
2<br />
0<br />
C stab<br />
{ s C |<br />
1<br />
re(<br />
s)<br />
2}<br />
0<br />
0 ( s s)<br />
2<br />
1<br />
KSO materiały do wykładu 2008/09 32<br />
Basic LMI tools for control (4)<br />
Stability<br />
Theorem:<br />
All eigenvalues of the real matrix A are <strong>in</strong> the region<br />
described by C<br />
stab<br />
{ s C|<br />
P Qs<br />
T<br />
Q s 0}<br />
with P<br />
T<br />
P<br />
if and only if there exists symmetric matrix X=X T >0<br />
p X<br />
p<br />
11<br />
k1<br />
X<br />
q11AX<br />
<br />
q AX<br />
k1<br />
T<br />
q11XA<br />
<br />
<br />
T<br />
q XA<br />
1k<br />
T<br />
p1<br />
k<br />
X q1<br />
k<br />
AX qk1XA<br />
<br />
T<br />
p X q AX q XA<br />
kk<br />
kk<br />
kk<br />
0<br />
Equivalent LMI us<strong>in</strong>g Kronecker multiplication:<br />
P X Q AX<br />
Q<br />
T<br />
XA<br />
T<br />
0<br />
KSO materiały do wykładu 2008/09 33<br />
11












![[TCP] Opis układu - Instytut Sterowania i Elektroniki Przemysłowej ...](https://img.yumpu.com/23535443/1/184x260/tcp-opis-ukladu-instytut-sterowania-i-elektroniki-przemyslowej-.jpg?quality=85)
