

Linear Matrix Inequalities in Control
Linear Matrix Inequalities in Control
Linear Matrix Inequalities in Control

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
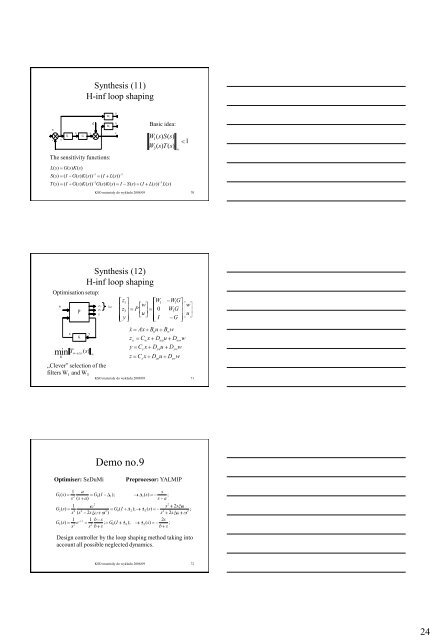
Synthesis (11)<br />
H-<strong>in</strong>f loop shap<strong>in</strong>g<br />
z1<br />
W1<br />
w<br />
-<br />
y<br />
K<br />
u<br />
G<br />
d<br />
+<br />
W3<br />
z3<br />
z<br />
Basic idea:<br />
W1<br />
( s)<br />
S(<br />
s)<br />
W ( s)<br />
T(<br />
s)<br />
3<br />
1<br />
The sensitivity functions:<br />
L(<br />
s)<br />
S(<br />
s)<br />
T(<br />
s)<br />
G(<br />
s)<br />
K(<br />
s)<br />
( I<br />
( I<br />
G(<br />
s)<br />
K(<br />
s))<br />
1<br />
( I<br />
L(<br />
s))<br />
1<br />
G(<br />
s)<br />
K(<br />
s))<br />
G(<br />
s)<br />
K(<br />
s)<br />
I<br />
1<br />
S(<br />
s)<br />
( I<br />
1<br />
L(<br />
s))<br />
L(<br />
s)<br />
KSO materiały do wykładu 2008/09 70<br />
Optimisation setup:<br />
w<br />
m<strong>in</strong><br />
K<br />
u<br />
T<br />
P<br />
K<br />
w z<br />
Synthesis (12)<br />
H-<strong>in</strong>f loop shap<strong>in</strong>g<br />
y<br />
( s)<br />
z1<br />
z3<br />
z<br />
„Clever” selection of the<br />
z<strong>in</strong>f<br />
z1<br />
z3<br />
y<br />
x<br />
z<br />
y<br />
z<br />
w<br />
P<br />
u<br />
C x<br />
W1<br />
0<br />
I<br />
D u<br />
WG<br />
1<br />
W3G<br />
G<br />
Ax Buu<br />
Bww<br />
C x D<br />
uu<br />
D<br />
ww<br />
C x D u D w<br />
z<br />
y<br />
yu<br />
zu<br />
yw<br />
D w<br />
zw<br />
w<br />
u<br />
KSO materiały do wykładu 2008/09 71<br />
Demo no.9<br />
Optimiser: SeDuMi<br />
Preprocesor: YALMIP<br />
G ( s)<br />
1<br />
G ( s)<br />
2<br />
G ( s)<br />
3<br />
1 a<br />
2<br />
s ( s a)<br />
G0<br />
( I );<br />
1<br />
2 2<br />
2<br />
s ( s 2s<br />
)<br />
G0<br />
( I );<br />
1 s 1 b s<br />
e ;<br />
2<br />
2<br />
s s b s<br />
G0<br />
( I );<br />
filters W 1 and W 3<br />
1<br />
2<br />
2<br />
3<br />
KSO materiały do wykładu 2008/09 72<br />
( s)<br />
1<br />
( s)<br />
( s)<br />
3<br />
2<br />
s<br />
;<br />
s a<br />
2<br />
s 2s<br />
2<br />
s 2s<br />
2s<br />
;<br />
b s<br />
2<br />
;<br />
Design controller by the loop shap<strong>in</strong>g method tak<strong>in</strong>g <strong>in</strong>to<br />
account all possible neglected dynamics.<br />
24












![[TCP] Opis układu - Instytut Sterowania i Elektroniki Przemysłowej ...](https://img.yumpu.com/23535443/1/184x260/tcp-opis-ukladu-instytut-sterowania-i-elektroniki-przemyslowej-.jpg?quality=85)
