The Lotka-Volterra predator-prey model
The Lotka-Volterra predator-prey model
The Lotka-Volterra predator-prey model

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
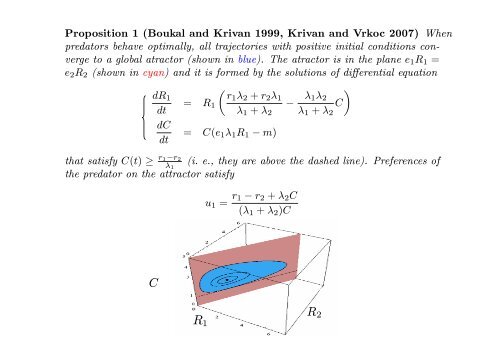
Proposition 1 (Boukal and Krivan 1999, Krivan and Vrkoc 2007) When<br />
<strong>predator</strong>s behave optimally, all trajectories with positive initial conditions converge<br />
to a global atractor (shown in blue). <strong>The</strong> atractor is in the plane e 1 R 1 =<br />
e 2 R 2 (shown in cyan) and it is formed by the solutions of differential equation<br />
(<br />
dR 1<br />
r1 λ 2 + r 2 λ 1<br />
= R 1 − λ )<br />
1λ 2<br />
C<br />
dt<br />
λ 1 + λ 2 λ 1 + λ 2<br />
dC<br />
= C(e 1 λ 1 R 1 − m)<br />
dt<br />
that satisfy C(t)≥ r 1−r 2<br />
λ 1<br />
(i. e., they are above the dashed line). Preferences of<br />
the <strong>predator</strong> on the attractor satisfy<br />
u 1 = r 1− r 2 + λ 2 C<br />
(λ 1 + λ 2 )C<br />
C<br />
R 1<br />
R 2