2 DGM for elliptic problems
2 DGM for elliptic problems
2 DGM for elliptic problems

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
2<br />
<strong>DGM</strong> <strong>for</strong> <strong>elliptic</strong> <strong>problems</strong><br />
chap:ellipt<br />
sec:2.0<br />
2.1 Model problem<br />
Let Ω be a bounded domain in IR d , d = 2,3, with a Lipschitz-continuous<br />
boundary ∂Ω. We denote by ∂Ω D and ∂Ω N parts of the boundary ∂Ω,<br />
Lebesques measurable with respect to (d − 1)-dimensional measure defined<br />
on ∂Ω, such that ∂Ω = ∂Ω D ∪ ∂Ω N and ∂Ω D ∩ ∂Ω N = ∅.<br />
We consider the following Poisson model problem: find a fucntion u : Ω →<br />
IR such that<br />
−∆u(x) = f(x), x ∈ Ω, (2.1) A0.1<br />
and<br />
u = u D , on ∂Ω D , (2.2) A0.2a<br />
n · ∇u = g N , on ∂Ω N , (2.3) A0.2b<br />
where f ∈ L 2 (Ω), u D ∈ L 2 (∂Ω D ) and g N ∈ L 2 (∂Ω N ). A sufficiently regular<br />
function satisfying ( 2.1) A0.1 – ( 2.3) A0.2b pointwise is called a classical solution. It is<br />
suitable to introduce the concept of a weak solution. Let us introduce the<br />
space<br />
V = {v ∈ H 1 (Ω); v| ∂ΩD = 0}. (2.4) A0.3a<br />
Now we multiply ( 2.1) A0.1 by a function v ∈ V , integrate over Ω and use the<br />
Green’s theorem. Taking into account the boundary condition ( 2.3), A0.2b we obtain<br />
the identity<br />
∫<br />
∫ ∫<br />
∇u · ∇v dx = f v dx + g N v dS, v ∈ V. (2.5) A0.3<br />
∂Ω N<br />
Ω<br />
Ω<br />
Let us assume the existence of u ∗ ∈ H 1 (Ω) such that u ∗ | ∂ΩD = u D . Now we<br />
say that a function u is a weak solution of problem ( 2.1) A0.1 - ( 2.3), A0.2b if u − u ∗ ∈ V<br />
and u satisfies identity ( 2.5).<br />
A0.3
10 2 Elliptic <strong>problems</strong><br />
sec:2.1<br />
sec:2.1.1<br />
conftri<br />
2.2 Spaces of discontinuous functions<br />
2.2.1 Partition of the domain<br />
Let T h (h > 0) be a partition of the closure Ω of the domain Ω into a finite<br />
number of closed d-dimensional simplexes K with mutually disjoint interiors<br />
such that<br />
Ω = ⋃<br />
K∈T h<br />
K. (2.6) A1.1<br />
We call T h a triangulation of Ω and do not require the standard con<strong>for</strong>ming<br />
properties from the finite element method, introduced e.g. in [Cia79], Ciarlet [BS94],<br />
BrScott<br />
Johnson<br />
[Joh88], [Sch00] Schwab or [Žen90]. Zenisek In two-dimensional <strong>problems</strong> (d = 2) we choose<br />
K ∈ T h as triangles and in three-dimensional <strong>problems</strong> (d = 3) the elements<br />
K ∈ T h are tetrehedra. As we see, we admit that in the finite element mesh<br />
the<br />
fig:faces<br />
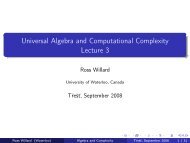
so-called hanging nodes (and in 3D also hanging edges) appear (see Figure<br />
2.1).<br />
Remark 2.1. Let us remind that the triangulation T h is con<strong>for</strong>ming, if it has<br />
the following property: if K,K ′ ∈ T h , then K ∩K ′ = ∅ or K ∩K ′ is a common<br />
vertex or K ∩ K ′ is a common edge (or K ∩ K ′ is a common face in the case<br />
d = 3) of K and K ′ .<br />
In general, the discontinuous Galerkin method can handle with more general<br />
elements as quadrilaterals and convex or even nonconvex star-shaped<br />
polygons in 2D and hexahedra, pyramids and convex or nonconvex star-shaped<br />
polyhedra in 3D. As an example, we can consider the so-called dual finite volumes<br />
constructed over triangular (d = 2) or tetrahedral (d = 3) meshes (cf.,<br />
e.g. [FFLMW99]). FFLW96 A use of such elements will be discussed in Section ??.<br />
sec:grids<br />
In our further considerations we shall use the following notation. By ∂K<br />
we denote the boundary of an element K ∈ T h and set h K = diam(K) =<br />
diameter of K, h = max K∈Th h K . By ρ K we denote the radius of the largest<br />
d-dimensional ball inscribed into K and by |K| we denote the d-dimensional<br />
Lebesgue measure of K.<br />
Let K,K ′ ∈ T h . We say that K and K ′ are neighbours, if the set ∂K ∩∂K ′<br />
has positive (d − 1)-dimensional measure. We say that Γ ⊂ K is a face of K,<br />
if it is a maximal connected open subset either of ∂K ∩ ∂K ′ , where K ′ is a<br />
neighbour of K, or of ∂K ∩ ∂Ω. By F h we denote the system of all faces of<br />
all elements K ∈ T h . Further, we define the set of all innner faces by<br />
the set of all “Dirichlet” boundary faces by<br />
and the set of all “Neumann” boundary faces by<br />
F I h = {Γ ∈ F h ; Γ ⊂ Ω}, (2.7) A1.6<br />
F D h = {Γ ∈ F h ; Γ ⊂ ∂Ω D } (2.8) A1.7
2.2 Spaces of discontinuous functions 11<br />
⃗n Γ8<br />
Γ 5<br />
Γ 6<br />
⃗n Γ6<br />
Γ 8<br />
⃗n Γ1<br />
⃗n Γ2<br />
K 1<br />
K 2<br />
K 3<br />
⃗n Γ5<br />
K 5<br />
Γ 1<br />
Γ 2<br />
⃗n Γ7<br />
Γ 7<br />
Γ 4<br />
Γ 3<br />
⃗n Γ4<br />
⃗n Γ3<br />
K 4<br />
Fig. 2.1. Example of elements K l , l = 1, . . . , 5, and faces Γ l , l = 1, . . . , 8, with the<br />
corresponding normals n Γl<br />
fig:faces<br />
F N h = {Γ ∈ F h , Γ ⊂ ∂Ω N } . (2.9) A1.8<br />
Obviously, F h = Fh I ∪ FD h ∪ FN h<br />
. For a shorter notation we put<br />
F ID<br />
h = F I h ∪ F D h , F DN<br />
h = F D h ∪ F N h . (2.10) A1.9<br />
For each Γ ∈ F h we define a unit normal vector n Γ . We assume that <strong>for</strong><br />
Γ ∈ Fh<br />
DN the normal n Γ has the same orientation as the outer normal to ∂Ω.<br />
For<br />
fig:faces<br />
each face Γ ∈ Fh I the orientation of n Γ is arbitrary but fixed. See Figure<br />
2.1. Finally, by d(Γ) we denote the diameter of Γ ∈ F h .<br />
sec:2.1.2<br />
2.2.2 Broken Sobolev spaces<br />
Over a triangulation T h we define the so-called broken Sobolev space<br />
H k (Ω, T h ) = {v;v| K ∈ H k (K) ∀K ∈ T h } (2.11) A1.12<br />
with the norm<br />
and the seminorm<br />
( ∑<br />
‖v‖ H k (Ω,T h ) =<br />
|v| H k (Ω,T h ) =<br />
K∈T h<br />
‖v‖ 2 H k (K)<br />
) 1/2<br />
(2.12) A1.13<br />
( ) 1/2 ∑<br />
. (2.13) A1.14<br />
K∈T h<br />
|v| 2 H k (K)
12 2 Elliptic <strong>problems</strong><br />
Γ<br />
⃗n Γ<br />
K (L)<br />
Γ<br />
K (R)<br />
Γ<br />
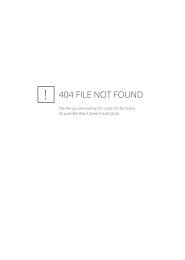
Fig. 2.2. Interior face Γ, elements K (L)<br />
Γ<br />
and K (R)<br />
Γ<br />
and the orientation of n Γ fig:normals<br />
For each Γ ∈ Fh I<br />
such that Γ ⊂ ∂K (L)<br />
Γ<br />
normal to the element ∂K (L)<br />
Γ<br />
Figure fig:normals<br />
2.2. We call elements K (L)<br />
Γ<br />
introduce the following notation:<br />
there exist two neighbouring elements K(L)<br />
Γ<br />
,K(R) Γ<br />
∈ T h<br />
∩ ∂K (R)<br />
Γ<br />
. We use a convention that n Γ is the outer<br />
v| (L)<br />
Γ<br />
v| (R)<br />
Γ<br />
and the inner normal to the element ∂K (R)<br />
Γ<br />
, see<br />
neighbours. For v ∈ H 1 (Ω, T h ), we<br />
, K(R) Γ<br />
= the trace of v| K<br />
(L)<br />
Γ<br />
= the trace of v| (R) K Γ<br />
)<br />
〈v〉 Γ<br />
= 1 2<br />
[v] Γ<br />
= v| (L)<br />
Γ<br />
(<br />
v| (L)<br />
Γ<br />
+ v|(R) Γ<br />
− v|(R) Γ .<br />
,<br />
on Γ, (2.14) A1.15<br />
on Γ,<br />
The value [v] Γ depends on the orientation of n Γ , but the value [v] Γ n Γ is<br />
independent of this orientation.<br />
For Γ ∈ Fh<br />
DN there exists element K (L)<br />
Γ<br />
∈ T h such that Γ ⊂ K (L)<br />
Γ<br />
∩ ∂Ω.<br />
Then <strong>for</strong> v ∈ H 1 (Ω, T h ), we introduce the following notation:<br />
v| (L)<br />
Γ<br />
= the trace of v| K<br />
(L)<br />
Γ<br />
〈v〉 Γ<br />
= [v] Γ<br />
= v| (L)<br />
Γ .<br />
on Γ, (2.15) A1.17<br />
For Γ ∈ Fh<br />
DN by v| (R)<br />
Γ<br />
we <strong>for</strong>mally denote the exterior trace of v on Γ given<br />
either by a boundary condition or by an extrapolation from the interior of Ω.<br />
In case that [·] Γ , 〈 · 〉 Γ<br />
and n Γ appear in the integrals ∫ Γ ... dS, Γ ∈ F h,<br />
we omit the subscript Γ and write simply [·], 〈 · 〉 and n, respectively.<br />
sec:2.1.3<br />
2.2.3 Spaces of discontinuous piecewise polynomial functions<br />
As we already mentioned in Introduction, <strong>DGM</strong> is based on the use of discontinuous<br />
piecewise polynomial approximations.
2.2 Spaces of discontinuous functions 13<br />
Let T h be a triangulation of Ω introduced in Section sec:2.1.1 2.2.1 and let p ≥<br />
0 be an integer. We define the space of discontinuous piecewise polynomial<br />
functions<br />
S hp = {v;v| K ∈ P p (K) ∀K ∈ T h }, (2.16) A1.23<br />
where P p (K) denotes the space of all polynomials on K of degree ≤ p. We<br />
call the number p the degree of polynomial approximation.<br />
sec:2.1.4<br />
2.2.4 Some auxiliary results<br />
Assumptions on the mesh<br />
Let us consider a system {T h } h∈(0,h0), h 0 > 0, of partitions of the domain Ω<br />
(T h = {K} K∈Th ). In our further considerations we shall meet the following<br />
assumptions.<br />
(A1) The system {T h } h∈(0,h0) is shape regular: there exists a positive constant<br />
C R such that<br />
h K<br />
ρ K<br />
≤ C R ∀K ∈ T h , ∀h ∈ (0,h 0 ). (2.17) A1.33<br />
(A2) The system {T h } h∈(0,h0) is locally quasi-uni<strong>for</strong>m: there exists a constant<br />
C H > 0 such that<br />
h K ≤ C H h K ′ ∀K,K ′ ∈ T h , K,K ′ are neighbours, ∀h ∈ (0,h 0 ). (2.18) A1.35<br />
rem:MA<br />
Remark 2.2. Sometimes the quasi-uni<strong>for</strong>mity of the mesh is required, i.e. there<br />
exists a constant ˜C > 0 such that h ≤ ˜Ch K ∀K ∈ T h . The condition ( 2.18)<br />
A1.35<br />
is weaker condition than quasi-uni<strong>for</strong>mity since it only limits the ratio of<br />
diameters of neighbouring elements.<br />
Let us introduce important tools <strong>for</strong> the theoretical analysis of the DG<br />
method.<br />
lem:MTI<br />
Lemma 2.3. (Multiplicative trace inequality) Let assumption (A1) be<br />
satisfied. Then there exists a constant C M > 0 independent of v, h and K<br />
such that<br />
(<br />
)<br />
‖v‖ 2 L 2 (∂K) ≤ C M ‖v‖ L2 (K) |v| H1 (K) + h −1<br />
K ‖v‖2 L 2 (K) , (2.19) eq:MTI<br />
K ∈ T h , v ∈ H 1 (K), h ∈ (0,h 0 ).<br />
Proof. Let K ∈ T h be arbitrary but fixed. We denote by x K the centre of the<br />
largest d−dimensional ball inscribed into the simplex K. (Of course, ρ K is the<br />
radius of this ball.) Without the loss of generality we suppose that x K is the<br />
origin of the coordinate system. We start from the following relation<br />
∫<br />
∫<br />
v 2 x · ndS = ∇ · (v 2 x)dx, v ∈ H 1 (K). (2.20) A1.51<br />
∂K<br />
K
14 2 Elliptic <strong>problems</strong><br />
x K<br />
α<br />
x<br />
K<br />
ρ K<br />
Γ<br />
n Γ<br />
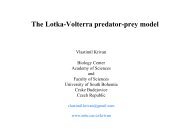
Fig. 2.3. Simplex K with its face Γ<br />
fig:dist<br />
Let n Γ be the unit outer normal to K on a side Γ of K. Then<br />
see Figure 2.3.<br />
fig:dist<br />
From ( 2.21) A1.52 we have<br />
∫<br />
x · n Γ = |x||n Γ |cos α = |x|cos α = ρ K x ∈ Γ, (2.21) A1.52<br />
∂K<br />
= ρ K<br />
∑<br />
v 2 x · n dS = ∑<br />
Γ ⊂∂K<br />
∫<br />
Γ<br />
Γ ⊂∂K<br />
∫<br />
Γ<br />
v 2 dS = ρ K ‖v‖ 2 L 2 (∂K) .<br />
v 2 x · n Γ dS (2.22) A1.54<br />
Moreover,<br />
∫<br />
∫<br />
∇ · (v 2 (<br />
x)dx = v 2 ∇ · x + x · ∇v 2) dx (2.23) A1.55<br />
K<br />
K<br />
∫ ∫<br />
∫<br />
= d v 2 dx + 2 vx · ∇v dx ≤ d‖v‖ 2 L 2 (K) + 2 |vx · ∇v|dx.<br />
K<br />
K<br />
With the aid of the Cauchy inequality, the second term of ( 2.23) A1.55 is estimated<br />
as<br />
∫<br />
∫<br />
2 |vx · ∇v|dx ≤ 2 sup |x| |v||∇v|dx ≤ 2h K ‖v‖ L 2 (K)|v| H 1 (K). (2.24) A1.56<br />
K<br />
x∈K K<br />
Then ( 2.17), A1.33 ( 2.20), A1.51 ( 2.22), A1.54 ( 2.23) A1.55 and ( 2.24) A1.56 give<br />
K
lem:II<br />
lem:III<br />
def:Pi_h<br />
2.2 Spaces of discontinuous functions 15<br />
‖v‖ 2 L 2 (∂K) ≤ 1 [<br />
]<br />
2h K ‖v‖ L<br />
ρ 2 (K)|v| H 1 (K) + d‖v‖ 2 L 2 (K) (2.25) A1.57<br />
K<br />
[<br />
≤ C R 2‖v‖ L2 (K)|v| H1 (K) + d ]<br />
‖v‖ 2 L<br />
h 2 (K) ,<br />
K<br />
which proves ( eq:MTI 2.19) with C M = C R max{2,d}. ⊓⊔<br />
Lemma 2.4. (Inverse inequality) Let (A1) be satisfied. Then there exists<br />
a constant C I > 0 independent of v, h and K such that<br />
|v| H1 (K) ≤ C I h −1<br />
K ‖v‖ L 2 (K), ∀v ∈ P p (K), ∀K ∈ T h , <strong>for</strong>allh ∈ (0,h 0 ).<br />
(2.26) eq:InvI<br />
Proof. Let ˆK be a reference triangle and F K : ˆK → K, K ∈ Th be an<br />
affine mapping such that F K ( ˆK) = K. By [Cia79], Ciarlet Theorem 3.1.2 <strong>for</strong> any v ∈<br />
H m (K), where m ≥ 0 is an integer,the function ˆv(ˆx) = v(F K (ˆx)) ∈ H m ( ˆK)<br />
and<br />
|v| Hm (K) ≤ c c h d 2 −m<br />
K |ˆv| H m ( ˆK)<br />
, (2.27) eq:ci1<br />
|ˆv| Hm ( ˆK) ≤ c ch m− d 2<br />
K |v| H m (K), (2.28) eq:ci2<br />
where c c > 0 depends on C R but not on K and v. From [Sch98], Schwab-book Theorem<br />
4.76 we have<br />
|ˆv| H 1 ( ˆK) ≤ c sp 2 ‖ˆv‖ L 2 ( ˆK) , ˆv ∈ P p( ˆK), (2.29) eq:sch<br />
where c s > 0 depends on d but not on ˆv and p. A simple combination of ( 2.27)<br />
eq:ci1<br />
– ( 2.29) eq:sch proves ( 2.26) eq:InvI with C I = c s c 2 c p 2 . ⊓⊔<br />
Lemma 2.5. (Approximation properties) Let assumption (A1) be valid.<br />
Then there exist a mapping π K,p : H 1 (K) → P p (K) and a constant C A > 0<br />
such that<br />
|π K,p v − v| H q (K) ≤ C A h µ−q<br />
K |v| H µ (K) (2.30) eq:ap<br />
∀v ∈ H s (K) ∀K ∈ T h ∀h ∈ (0,h 0 ),<br />
where µ = min(p + 1,s), 0 ≤ q ≤ s and p,s are integers.<br />
Proof. We define π K,p as the L 2 (K) projection on P p (K), i.e, <strong>for</strong> ϕ ∈ L 2 (K),<br />
∫<br />
∫<br />
π K,p ϕ ∈ P p (K), (π K,p ϕ)v dx = ϕv dx ∀v ∈ P p (K). (2.31) Ltwoproj<br />
K<br />
The approximation properties ( 2.30) eq:ap follow immediately from [Cia79, Ciarlet Theorem<br />
3.1.4].<br />
⊓⊔<br />
Definition 2.6. Let T h be a triangulation and p ≥ 0. We define the mapping<br />
Π hp : H 1 (Ω, T h ) → S hp by<br />
K<br />
(Π hp u) | K = π K,p (u| K ) ∀K ∈ T h , (2.32) eq:Pi_h<br />
where π K,p : H 1 (K) → P p (K) is the mapping introduced in Lemma 2.5.<br />
lem:III
lem:AP<br />
16 2 Elliptic <strong>problems</strong><br />
By ( 2.31), Ltwoproj π K,p is the operator of L 2 (K)-projection. This implies that Π hp<br />
is the L 2 (Ω)-projection on S hp : if ϕ ∈ L 2 (Ω), then<br />
∫<br />
∫<br />
Π hp ϕ ∈ S hp , (Π hp ϕ)v dx = ϕv dx ∀v ∈ S hp . (2.33) LtwoprOm<br />
Lemma 2.7. Let assumption (A1) be valid. Then<br />
Ω<br />
Ω<br />
|Π hp v − v| Hq (Ω,T h ) ≤ C Ah µ−q |v| Hµ (Ω,T h ), v ∈ H s (Ω, T h ), (2.34) eq:AP<br />
where µ = min(p + 1,s), 0 ≤ q ≤ s and C A is the constant from ( 2.30).<br />
eq:ap<br />
Proof. Using ( 2.32), eq:Pi_h definition of a seminorm in a broken Sobolev space and<br />
the approximation properties ( 2.30), eq:ap we obtain ( 2.34). eq:AP<br />
⊓⊔<br />
sec:2.2<br />
2.3 <strong>DGM</strong> based on a primal <strong>for</strong>mulation<br />
In this section we shall describe and analyze the <strong>DGM</strong> <strong>for</strong> the solution of<br />
problem ( 2.1) A0.1 – ( 2.3) A0.2b based on a primal <strong>for</strong>mulation. The approximate solution<br />
will be sought in the space S hp ⊂ H 1 (Ω, T ). However, the weak <strong>for</strong>mulation<br />
( 2.5) A0.3 given in Section 2.1 sec:2.0 is not suitable <strong>for</strong> the derivation of the <strong>DGM</strong>, because<br />
( 2.5) A0.3 does not make sense <strong>for</strong> u ∈ H 1 (Ω, T ) ⊄ H 1 (Ω). There<strong>for</strong>e, we shall<br />
introduce a “weak <strong>for</strong>m of ( 2.1) A0.1 – ( 2.3) A0.2b in the sence of broken Sobolev spaces”.<br />
Let as assume that u is a sufficiently regular solution of ( 2.1) A0.1 – ( 2.3). A0.2b We<br />
shall consider the so-called strong solution, i.e. a solution u ∈ H 2 (Ω). We<br />
proceed in the following way: We multiply ( 2.1) A0.1 by a function v ∈ H 2 (Ω, T h )<br />
integrate over K ∈ T and use Green’s theorem. Summing over all K ∈ T h , we<br />
obtain the identity<br />
∑<br />
∇u · ∇v dx − ∑<br />
∫<br />
(n K · ∇u)v dS = f v dx, (2.35) A2.4<br />
K∈T h<br />
∫K<br />
K∈T h<br />
∫∂K<br />
where n K denotes the unit outer normal to ∂K. The surface integrals over<br />
∂K make sense due to the regularity of u. We split them according to the<br />
type of faces Γ that <strong>for</strong>m the boundary of the element K ∈ T h :<br />
∑<br />
K∈T h<br />
∫∂K<br />
= ∑<br />
Γ ∈F D h<br />
+ ∑<br />
∫<br />
Γ ∈F I h<br />
Γ<br />
∫<br />
(n K · ∇u)v dS (2.36) A2.5<br />
(n Γ · ∇u)v dS + ∑<br />
Γ<br />
(<br />
n Γ ·<br />
Γ ∈F N h<br />
(∇u| (L)<br />
Γ<br />
)v|(L) Γ<br />
∫<br />
Γ<br />
Ω<br />
(n Γ · ∇u)v dS<br />
− (∇u|(R) Γ<br />
)v|(R) Γ<br />
)<br />
dS.<br />
(There is a sign “−” in the last integral, since n Γ is the unit outer normal to<br />
but the unit inner normal to ∂K (R) sec:2.1.1<br />
Γ<br />
, see Section 2.2.1 or Figure 2.2.<br />
fig:normals<br />
∂K (L)<br />
Γ
Due to the assumption that u ∈ H 2 (Ω),<br />
[u] Γ = 0 = [∇u] Γ ,<br />
2.3 <strong>DGM</strong> based on a primal <strong>for</strong>mulation 17<br />
∇u| (L)<br />
Γ<br />
= ∇u| (R)<br />
Γ<br />
= 〈∇〉 Γ . (2.37) jumpsonGamma<br />
Thus, the integrand of the last integral in ( A2.5 2.36) can by written in the <strong>for</strong>m<br />
n Γ · (∇u)| (L)<br />
Γ<br />
v|(L) Γ<br />
Hence, due to ( A0.2b 2.3), ( A1.17 2.15) and ( A2.4 2.35) – ( A2.6<br />
∫<br />
=<br />
∑<br />
K∈T h<br />
∫K<br />
Ω<br />
− n Γ · (∇u)| (R)<br />
Γ<br />
v|(R) Γ<br />
= n Γ · 〈∇u)〉 Γ<br />
[v] Γ . (2.38) A2.6<br />
∇u · ∇v dx −<br />
f v dx + ∑<br />
Γ ∈F N h<br />
∫<br />
Γ<br />
2.38), we have<br />
∑ ∫<br />
n · 〈∇u〉 [v]dS (2.39) A2.9<br />
Γ ∈F ID<br />
h<br />
Γ<br />
g N v dS, v ∈ H 2 (Ω, T h ).<br />
Moreover, <strong>for</strong> u,v ∈ H 1 (Ω, T h ) we define the interior penalty bilinear <strong>for</strong>m<br />
Jh σ (u,v) = ∑ ∫<br />
σ[u][v]dS (2.40) A2.17<br />
and the boundary penalty linear <strong>for</strong>m<br />
Γ ∈F ID<br />
h<br />
J σ D(v) = ∑<br />
Γ ∈F D h<br />
∫<br />
Γ<br />
Γ<br />
σu D v dS, (2.41) A2.18<br />
where σ > 0 is a penalty weight. Its choice will be discussed in Section 2.4.<br />
sec:2.4<br />
If u ∈ H 1 (Ω) ∩H 2 (Ω, T h ) and u satisfies the Dirichlet boundary condition<br />
( 2.2), A0.2a then<br />
∑<br />
∫<br />
n · 〈∇v〉 [u]dS = ∑ ∫<br />
n · ∇v u D dS ∀v ∈ H 2 (Ω, T h ) (2.42) A2.E1<br />
and<br />
Γ ∈F ID<br />
h<br />
Γ<br />
Γ ∈F D h<br />
Γ<br />
J σ h(u,v) = J σ D(v) ∀v ∈ H 2 (Ω, T h ), (2.43) A2.E2<br />
since [u] Γ = 0 <strong>for</strong> Γ ∈ Fh I and [u] Γ = u| Γ = u D <strong>for</strong> Γ ∈ Fh D.<br />
Now, we introduce several variants of the discontinuous Galerkin weak<br />
<strong>for</strong>mulation in such a way that we sum ( 2.39) A2.9 with −1, 0 or 1-multiple of<br />
( 2.42) A2.E1 and possibly add equality ( 2.43).This A2.E2 leads us to the following notation.<br />
For u,v ∈ H 2 (Ω, T h ) we set<br />
a s h(u,v) = ∑<br />
K∈T h<br />
∫K<br />
−<br />
∑<br />
Γ ∈F ID<br />
h<br />
∇u · ∇v dx (2.44) ah_S<br />
∫<br />
Γ<br />
(n · 〈∇u〉 [v] + n · 〈∇u〉 [v]) dS,
18 2 Elliptic <strong>problems</strong><br />
a n h(u,v) = ∑<br />
K∈T h<br />
∫K<br />
−<br />
a i h(u,v) = ∑<br />
∑<br />
Γ ∈F ID<br />
h<br />
K∈T h<br />
∫K<br />
∇u · ∇v dx (2.45) ah_N<br />
∫<br />
Γ<br />
(n · 〈∇u〉 [v] − n · 〈∇u〉 [v]) dS,<br />
∇u · ∇v dx −<br />
∑<br />
Γ ∈F ID<br />
h<br />
∫<br />
Γ<br />
n · 〈∇u〉 [v]dS (2.46) ah_I<br />
and the linear <strong>for</strong>ms<br />
∫<br />
Fh(v) s = f v dx + ∑<br />
∫<br />
Fh n (v) =<br />
∫<br />
Fh(v) i =<br />
Ω<br />
Ω<br />
Γ ∈F N h<br />
f v dx + ∑<br />
Γ ∈F N h<br />
f v dx + ∑<br />
Ω<br />
Γ ∈F N h<br />
∫<br />
g N v dS + ∑ ∫<br />
n · ∇v u D dS, (2.47) Fh_S<br />
∫<br />
∫<br />
Γ<br />
Γ<br />
Γ<br />
Γ ∈F D h<br />
g N v dS − ∑<br />
∫<br />
Γ<br />
Γ ∈F D Γ<br />
h<br />
n · ∇v u D dS, (2.48) Fh_N<br />
g N v dS. (2.49) Fh_I<br />
Moreover, <strong>for</strong> u,v ∈ H 2 (Ω, T h ) let us define the bilinear <strong>for</strong>ms<br />
and the linear <strong>for</strong>ms<br />
B s h(u,v) = a s h(u,v), (2.50) A2.20a<br />
Bh(u,v) n = a n h(u,v), (2.51) A2.20b<br />
B s,σ<br />
h (u,v) = as h(u,v) + Jh σ (u,v), (2.52) A2.20c<br />
B n,σ<br />
h (u,v) = an h(u,v) + Jh σ (u,v), (2.53) A2.20d<br />
B i,σ<br />
h (u,v) = ai h(u,v) + Jh σ (u,v) (2.54) A2.20e<br />
def:2.1<br />
l s h(v) = F s h(v), (2.55) A2.21a<br />
l n h(v) = Fh n (v), (2.56) A2.21b<br />
l s,σ<br />
h (v) = F h(v) s + JD(v), σ (2.57) A2.21c<br />
l n,σ<br />
h (v) = F h n (v) + JD(v), σ (2.58) A2.21d<br />
l i,σ<br />
h (v) = F h(v) i + JD(v). σ (2.59) A2.21e<br />
Since S hp ⊂ H 2 (Ω, T h ), the <strong>for</strong>ms ( 2.50) A2.20a – ( 2.59) A2.21e make sense <strong>for</strong> u h ,v h ∈<br />
S hp . Consequently, we define five numerical schemes.<br />
Definition 2.8. A function u h ∈ S hp is called a DG approximate solution of<br />
problem ( 2.1) A0.1 – ( 2.3), A0.2b if it satisfies one of the following identities:<br />
i) B s h(u h ,v h ) = l s h(v h ) ∀v h ∈ S hp (2.60) A2.22a<br />
ii) B n h(u h ,v h ) = l n h(v h ) ∀v h ∈ S hp (2.61) A2.22b
2.3 <strong>DGM</strong> based on a primal <strong>for</strong>mulation 19<br />
iii) B s,σ<br />
h<br />
(u h,v h ) = l s,σ<br />
h (v h) ∀v h ∈ S hp (2.62) A2.22c<br />
iv) B n,σ<br />
h<br />
(u h,v h ) = l n,σ<br />
h (v h) ∀v h ∈ S hp (2.63) A2.22d<br />
v) B i,σ<br />
h (u h,v h ) = l i,σ<br />
h (v h) ∀v h ∈ S hp (2.64) A2.22e<br />
where the <strong>for</strong>ms Bh s, Bn h ,... and ls h ,ln h<br />
,... are defined by (A2.20a 2.50) – ( 2.54) A2.20e and<br />
( 2.55) A2.21a – ( 2.59), A2.21e respectively.<br />
If we denote by B h any <strong>for</strong>m defined by ( 2.50) A2.20a – ( 2.54) A2.20e and by l h we denote<br />
the corresponding <strong>for</strong>m given by ( 2.55) A2.21a – ( 2.59), A2.21e the discrete problem can be<br />
<strong>for</strong>mulated to find u h ∈ S hp satisfying the identity<br />
B h (u h ,v h ) = l h (v h ) ∀v h ∈ S hp . (2.65) dispr<br />
From the construction of the <strong>for</strong>ms B and l one can see that the strong<br />
solution u ∈ H 2 (Ω) of problem ( 2.1) A0.1 – ( 2.3) A0.2b satisfies the identity<br />
terminology<br />
B h (u,v) = l h (v) ∀v ∈ H 2 (Ω, T h ) (2.66) A2.23<br />
which represents the consistency of the method. The expressions ( 2.65) dispr and<br />
( 2.66) A2.23 imply the so-called Galerkin orthogonality of the error e h = u h − u of<br />
the method:<br />
B h (e h ,v h ) = 0 ∀v h ∈ S hp , (2.67) A2.23a<br />
which will be used in the analysis of error estimates.<br />
In contrast to standard con<strong>for</strong>ming finite element techniques, both Dirichlet<br />
and Neumann boundary conditions are included automatically in <strong>for</strong>mulation<br />
( 2.65) dispr of the discrete problem. This is an advantage particularly in<br />
the case of nonhomogeneous Dirichlet boundary conditions, because it is not<br />
necessary to construct subsets of finite element spaces <strong>for</strong>med by functions<br />
approximating the Dirichlet boundary condition in a suitable way.<br />
Remark 2.9. The method ( 2.60) A2.22a was introduced by Delves et al. ([DH79],<br />
Delves1<br />
Delves2<br />
[DP80], [HD79], Delves3 [HDP79]), Delves4 who call it global element method. Its advantage is<br />
the symmetry of the discrete problem. On the other hand, a significant disadvantage<br />
is that the billinear <strong>for</strong>m Bh s (·, ·) is indefinite. This causes troubles<br />
when dealing with time-dependent problem since some eigenvalues can have<br />
negative real parts and then the resulting <strong>for</strong>mulations becames unconditionally<br />
unstable. There<strong>for</strong>e we prove in Lemma 2.18 lem:A11 the continuity of the bilinear<br />
<strong>for</strong>m Bh s , but further we shall not be concerned with this method any more.<br />
The scheme ( 2.61) A2.22b was introduced by Baumann and Oden in [BBO99],<br />
bbo<br />
obb<br />
[OBB98]. There<strong>for</strong>e, we shall call it the Baumann-Oden method. It is straight<strong>for</strong>ward<br />
to show that the corresponding billinear <strong>for</strong>m Bh n (·, ·) is positive<br />
semidefinite. An interesting property of this method is that it is unstable<br />
<strong>for</strong> piecewise linear approximations, i.e. <strong>for</strong> p = 1.
20 2 Elliptic <strong>problems</strong><br />
The scheme ( 2.62) A2.22c is called symmetric interior penalty Galerkin (SIPG)<br />
method. It was derived by Arnold ([Arn82]) Arnold and Wheeler ([Whe78]) Whe78 by adding<br />
penalty terms to the <strong>for</strong>m Bh s . This <strong>for</strong>mulation leads to a symmetric bilinear<br />
<strong>for</strong>m which is coercive if the penalty parameter σ is sufficiently large.<br />
Moreover, the Aubin-Nitsche trick can be used <strong>for</strong> obtaining an optimal error<br />
estimate in the L 2 (Ω)-norm.<br />
The method ( 2.63), A2.22d called nonsymmetric interior penalty Galerkin (NIPG)<br />
method, was proposed by Girault, Riviére and Wheeler in [RWG99]. RWG99 In this<br />
case the bilinear <strong>for</strong>m B n,σ<br />
h<br />
is nonsymmetric and does not allow to obtain<br />
optimal error estimates in the L 2 (Ω)-norm with the aid of the Aubin-Nitsche<br />
trick. However, numerical experiments show that the odd degrees of the polynomial<br />
approximation give the optimal order of convergence. On the other<br />
hand, a favorable property of NIPG method is the coercivity of B n,σ<br />
h<br />
(·, ·) <strong>for</strong><br />
any penalty parameter σ > 0.<br />
Finally, the method 2.64), A2.22e called incomplete interior penalty Galerkin<br />
(IIPG) method, was studied in [DSW04], Dawson2004 [Sun03], Sun-PhD [SW05]. Sun05 In this case the<br />
bilinear <strong>for</strong>m B i,σ<br />
h<br />
is nonsymmetric and does not allow to obtain an optimal<br />
error estimate in the L 2 (Ω)-norm. Moreover, the penalty parameter σ should<br />
be chosen sufficiently large in order to guarantee the coercivity of B i,σ<br />
h . The<br />
advantage of the IIPG method is the simplicity of the discrete diffusion operator.<br />
This is particularly advantageous in the case when the diffusion operator<br />
is nonlinear. (See, e.g. [Dol08].<br />
iipg07<br />
It would also be possible to define the scheme Bh i (u,v) = li h (v) ∀v ∈ S hp,<br />
where Bh i (u,v) = ai h (u,v) and li h (v) = F h i (v), but this method does not make<br />
sense, because it does not contain the Dirichlet boundary condition ( 2.2).<br />
A0.2a<br />
sec:2.4<br />
2.4 Properties of the bilinear <strong>for</strong>ms<br />
We are interested in the existence of the numerical solutions of method ( 2.60)<br />
A2.22a<br />
– ( 2.64) A2.22e and in a priori error estimates of the difference of numerical solution<br />
and the exact one. There<strong>for</strong>e, we define the following mesh-dependent norm<br />
|||u||| Th<br />
=<br />
(<br />
|u| 2 H 1 (Ω,T h ) + Jσ h(u,u)) 1/2<br />
, (2.68) en<br />
In what follows, if there is no danger of misunderstanding, we shall omit<br />
the subscript T h . This means that we shall simply write ||| · ||| = ||| · ||| Th<br />
.<br />
exer1 Exercise 2.10. Prove that ||| · ||| is a norm on the spaces H 1 (Ω, T h ) and S hp .<br />
Let Γ ∈ Fh I be an inner face and K(L)<br />
Γ<br />
and K (R)<br />
Γ<br />
the elements sharing Γ.<br />
There are several possibilities how to define the penalty weight σ. We can set<br />
σ| Γ =<br />
(<br />
max<br />
C W<br />
h K<br />
(L)<br />
Γ<br />
, h K<br />
(R)<br />
Γ<br />
), (2.69) A3.1
where h K<br />
(L)<br />
Γ<br />
and h K<br />
(R)<br />
Γ<br />
2.4 Properties of the bilinear <strong>for</strong>ms 21<br />
are the diameters of the elements K (L)<br />
Γ<br />
and K (R)<br />
Γ ,<br />
respectively, adjacent to the face Γ, and C W > 0 is a suitable constant. For<br />
boundary faces Γ ∈ F D h (i.e. Γ ⊂ Γ D) we put<br />
σ| Γ = C W<br />
h K<br />
(L)<br />
Γ<br />
, (2.70) A3.2<br />
where C W > 0 and h KΓ denotes the diameter of the element K (L)<br />
Γ<br />
adjacent<br />
to Γ. If we use the simplified notation<br />
( )<br />
h Γ = max h (L) K<br />
, h (R)<br />
Γ K<br />
<strong>for</strong> Γ ∈ Fh I and h Γ = h (L)<br />
Γ<br />
K<br />
<strong>for</strong> Γ ∈ Fh D , (2.71)<br />
Γ<br />
A3.2a<br />
we can write<br />
σ| Γ = C W<br />
, Γ ∈ F h . (2.72) A3.3<br />
h Γ<br />
Let Γ ⊂ ∂K be a face of an element K. Then, in virtue of ( 2.18) A1.35 and ( 2.71),<br />
A3.2a<br />
we have<br />
h K ≤ h Γ ≤ C H h K , K ∈ T h , Γ ∈ F h , Γ ⊂ K. (2.73) A3.5<br />
Another possibility is to replace ( 2.69) A3.1 by<br />
σ| Γ =<br />
h K<br />
(L)<br />
Γ<br />
2C W<br />
In this case, σ| Γ is defined by ( A3.3 2.72) with<br />
h Γ =<br />
h K<br />
(L)<br />
Γ<br />
+ h K<br />
(R)<br />
Γ<br />
. (2.74) A3.1a<br />
+ h (R) K Γ<br />
. (2.75) A3.1b<br />
2<br />
If the partition T h represents a standard con<strong>for</strong>ming triangulation <strong>for</strong>med<br />
by simplexes, then one ususally defines the weight σ| Γ as<br />
σ| Γ = C W<br />
, (2.76) A3.1c<br />
diam(Γ)<br />
i.e. h Γ = diam(Γ).<br />
Under the introduced notation, in view of ( 2.40) A2.17 and ( 2.72), A3.3 the interior<br />
and boundary penalty <strong>for</strong>ms read<br />
Jh σ (u,v) = ∑ ∫<br />
C W<br />
[u][v]dS, (2.77) A3.4<br />
h Γ<br />
Γ ∈F ID<br />
h<br />
J σ D(v) = ∑<br />
Γ ∈F D h<br />
∫<br />
Γ<br />
Γ<br />
C W<br />
h Γ<br />
u D v dS.
22 2 Elliptic <strong>problems</strong><br />
estsigma<br />
Lemma 2.11. Let (A2) be valid. Then <strong>for</strong> each v ∈ H 1 (Ω, T h ) we have<br />
∑<br />
∫<br />
[v] 2 dS ≤ ∑ ∫<br />
|v| 2 dS, (2.78) A3.6a<br />
Γ ∈F ID<br />
h<br />
∑<br />
Γ ∈F ID<br />
h<br />
h −1<br />
Γ<br />
h Γ<br />
∫<br />
Γ<br />
Γ<br />
2h −1<br />
K<br />
K∈T h<br />
〈v〉 2 dS ≤ C H<br />
∑<br />
∂K<br />
K∈T h<br />
h K<br />
∫∂K<br />
|v| 2 dS. (2.79) A3.7a<br />
Hence,<br />
∑<br />
Γ ∈F ID<br />
h<br />
∑<br />
Γ ∈F ID<br />
h<br />
σ| Γ ‖[v]‖ 2 L 2 (Γ) ≤ 2C W<br />
1<br />
σ| Γ<br />
‖〈v〉‖ 2 L 2 (Γ) ≤ C H<br />
C W<br />
Proof. a) By ( A1.15 2.14), the inequality<br />
∑ 1<br />
‖v‖ 2 L<br />
h 2 (∂K), K<br />
K∈T h<br />
(2.80) A3.6<br />
∑<br />
. (2.81) A3.7<br />
K∈T h<br />
h K ‖v‖ 2 L 2 (∂K)<br />
exer2<br />
and ( 2.73) A3.5 we have<br />
∑<br />
∫<br />
h −1<br />
Γ [v]2 dS = ∑<br />
Γ ∈F ID<br />
h<br />
≤ 2 ∑<br />
Γ<br />
Γ ∈F I h<br />
≤ 2 ∑<br />
Γ ∈F ID<br />
h<br />
≤ 2 ∑<br />
∫<br />
h −1<br />
Γ<br />
Γ<br />
h −1<br />
K<br />
K∈T h<br />
h −1<br />
K (L)<br />
Γ<br />
∫<br />
(γ + δ) 2 ≤ 2(γ 2 + δ 2 ), γ,δ ∈ IR, (2.82) AC3.6<br />
Γ ∈F I h<br />
( ∣∣∣v| (L)<br />
∣ 2 ∣<br />
+<br />
∫<br />
∂K<br />
∣<br />
Γ<br />
∣v| (L)<br />
Γ<br />
Γ<br />
|v| 2 dS.<br />
∫<br />
h −1<br />
Γ<br />
Γ<br />
∣v| (R)<br />
Γ<br />
∣ 2 dS + ∑<br />
∣<br />
∣v| (L)<br />
Γ<br />
− v|(R) Γ<br />
∣ 2) dS + ∑<br />
Γ ∈F I h<br />
h K<br />
(R)<br />
Γ<br />
Γ ∈F D h<br />
∫<br />
∣<br />
∣ 2 dS + ∑<br />
∫<br />
h −1 ∣<br />
Γ<br />
Γ<br />
∣v| (R)<br />
Γ<br />
Γ<br />
∣ 2 dS<br />
Γ ∈F D h<br />
∣v| (L)<br />
Γ<br />
∫<br />
h −1 ∣<br />
Γ<br />
Γ<br />
∣ 2 dS<br />
∣v| (L)<br />
Γ<br />
This and ( 2.72) A3.3 immediately imply ( 2.80).<br />
A3.6<br />
b) In the proof of ( 2.79) A3.7a we proceed similarly, using ( 2.14), A1.15 ( 2.73) A3.5 and<br />
( 2.82). AC3.6 Inequality ( 2.81) A3.7 is a consequence of ( 2.79) A3.7a and ( 2.72). A3.3<br />
⊓⊔<br />
Exercise 2.12. Formulate and prove Lemma 2.11 estsigma <strong>for</strong> definitions ( 2.74) A3.1a and<br />
( 2.76).<br />
A3.1c<br />
∣ 2 dS<br />
2.4.1 Continuity of the bilinear <strong>for</strong>ms B<br />
First, we shall prove an auxiliary assertion.
lem:A11a<br />
2.4 Properties of the bilinear <strong>for</strong>ms 23<br />
Lemma 2.13. Any <strong>for</strong>m a h defined by ( 2.44), ah_S ( 2.45) ah_N or ( 2.46) ah_I satisfies the<br />
estimate<br />
|a h (u,v)| ≤ ‖u‖ 1,σ ‖v‖ 1,σ ∀u,v ∈ H 2 (Ω, T h ), (2.83) Aa2.31<br />
where<br />
‖v‖ 2 1,σ = |v| 2 H 1 (Ω,T h ) + ∑<br />
Γ ∈F ID<br />
h<br />
Proof. It follows from ( ah_S 2.44) – ( ah_N 2.45) that<br />
∫<br />
Γ<br />
(<br />
σ −1 (n · 〈∇v〉) 2 + σ[v] 2) dS (2.84) Aa2.31b<br />
|a h (u,v)| ≤ ∑<br />
|∇u · ∇v| dx<br />
(2.85) Aa2.32<br />
K∈T<br />
∫K h<br />
} {{ }<br />
χ 1<br />
+ ∑ ∫<br />
|n · 〈∇u〉 [v]| dS + ∑ ∫<br />
|n · 〈∇u〉 [v]| dS<br />
Γ ∈F ID<br />
h<br />
Γ<br />
} {{ }<br />
χ 2<br />
Γ ∈F ID<br />
h<br />
Γ<br />
} {{ }<br />
χ 3<br />
.<br />
(For the <strong>for</strong>m a i h term χ 3 vanishes of course.) Obviously,<br />
Moreover, the Cauchy inequality implies that<br />
χ 2 ≤<br />
∑<br />
Γ ∈F ID<br />
h<br />
⎛<br />
≤ ⎝ ∑<br />
Γ ∈F ID<br />
h<br />
(∫<br />
∫<br />
Γ<br />
Γ<br />
χ 1 ≤ |u| H 1 (Ω,T h )|v| H 1 (Ω,T h ). (2.86) Aa2.33<br />
) 1/2 (∫ 1/2<br />
σ −1 (n · 〈∇u〉) 2 dS σ[v] dS) 2 (2.87) Aa2.34<br />
Γ<br />
⎞<br />
σ −1 (n · 〈∇u〉) 2 dS⎠<br />
1/2 ⎛<br />
⎝ ∑<br />
Γ ∈F ID<br />
h<br />
∫<br />
Γ<br />
⎞<br />
σ[v] 2 dS⎠<br />
where the penalty weight σ is given by ( A3.1 2.69). Similarly we find that<br />
⎛<br />
χ 3 ≤ ⎝ ∑<br />
Γ ∈F ID<br />
h<br />
∫<br />
Γ<br />
⎞<br />
σ −1 (n · 〈∇v〉) 2 dS⎠<br />
1/2 ⎛<br />
⎝ ∑<br />
Γ ∈F ID<br />
h<br />
∫<br />
Γ<br />
⎞<br />
σ[u] 2 dS⎠<br />
Using the Cauchy inequality, from ( Aa2.33 2.86) – ( Aa2.35 2.88) we derive the bound<br />
1/2<br />
1/2<br />
,<br />
. (2.88) Aa2.35<br />
|a h (u,v)| ≤ |u| H1 (Ω,T h )|v| H1 (Ω,T h ) (2.89) Aa2.36<br />
⎛<br />
⎞<br />
+ ⎝ ∑<br />
1/2 ⎛<br />
⎞<br />
∫<br />
σ −1 (n · 〈∇u〉) 2 dS⎠<br />
⎝ ∑<br />
1/2<br />
∫<br />
σ[v] 2 dS⎠<br />
Γ ∈F ID<br />
h<br />
Γ<br />
Γ ∈F ID<br />
h<br />
Γ
24 2 Elliptic <strong>problems</strong><br />
⎛<br />
+ ⎝ ∑<br />
⎛<br />
Γ ∈F ID<br />
h<br />
∫<br />
≤ ⎝|u| 2 H 1 (Ω,T h ) + ∑<br />
⎛<br />
Γ<br />
⎞<br />
σ −1 (n · 〈∇v〉) 2 dS⎠<br />
Γ ∈F ID<br />
h<br />
× ⎝|v| 2 H 1 (Ω,T h ) + ∑<br />
= ‖u‖ 1,σ ‖v‖ 1,σ .<br />
∫<br />
Γ ∈F ID<br />
h<br />
Γ<br />
1/2 ⎛<br />
⎝ ∑<br />
Γ ∈F ID<br />
h<br />
∫<br />
Γ<br />
⎞<br />
σ[u] 2 dS⎠<br />
⎞<br />
(<br />
σ −1 (n · 〈∇u〉) 2 + σ[u] 2) dS⎠<br />
∫<br />
Γ<br />
1/2<br />
⎞<br />
(<br />
σ −1 (n · 〈∇v〉) 2 + σ[v] 2) dS⎠<br />
1/2<br />
1/2<br />
exer3<br />
exer4<br />
lem:est_sigma<br />
⊓⊔<br />
Exercise 2.14. Prove that ‖ · ‖ 1,σ intoduced by ( 2.83) Aa2.31 defines a norm on the<br />
broken Sobolev space H 2 (Ω, T h ).<br />
Corollary 2.15. By virtue of ( 2.50) A2.20a – ( 2.51), A2.20b Lemma 2.13 lem:A11a and Exercise 2.14,<br />
exer3<br />
the bilinear <strong>for</strong>ms Bh s and Bn h are bounded with respect to the norm ‖ · ‖ 1,σ on<br />
the broken Sobolev space H 2 (Ω, T h ).<br />
Exercise 2.16. Prove that the bilinear <strong>for</strong>ms B s,σ<br />
h<br />
respect to the norm ‖ · ‖ 1,σ on H 2 (Ω, T h ).<br />
and B n,σ<br />
h<br />
are bounded with<br />
Lemma 2.17. Under assumptions (A1) and (A2), <strong>for</strong> any v ∈ H 2 (Ω, T h ) the<br />
following estimate holds:<br />
∑<br />
∫<br />
σ −1 (n · 〈∇v〉) 2 dS (2.90) A2.30a<br />
Γ ∈F ID<br />
h<br />
Γ<br />
≤ C HC M<br />
C W<br />
∑ (<br />
)<br />
h K ‖∇v‖ L2 (K) |∇v| H1 (K) + h −1<br />
K ‖∇v‖2 L 2 (K)<br />
K∈T h<br />
Proof. Using ( 2.81) A3.7 and ( 2.19), eq:MTI we find that<br />
∑<br />
∫<br />
σ −1 (n · 〈∇v〉) 2 dS (2.91) A2.35ab<br />
Γ ∈F ID<br />
h<br />
≤ C H<br />
C W<br />
≤ C HC M<br />
C W<br />
Γ<br />
∑<br />
h K ‖∇v‖ 2 L 2 (∂K)<br />
K∈T h<br />
∑ (<br />
h K ‖∇v‖ L 2 (K) |∇v| H 1 (K) + h −1<br />
K ‖∇v‖2 L 2 (K)<br />
K∈T h<br />
which we wanted to prove.<br />
⊓⊔<br />
Now, we prove the continuity of the bilinear <strong>for</strong>ms B defined by ( 2.50) A2.20a –<br />
( 2.54) A2.20e with respect to the norm ||| · ||| given by ( 2.68) en on the space S hp .<br />
)<br />
,
2.4 Properties of the bilinear <strong>for</strong>ms 25<br />
lem:A11<br />
Lemma 2.18. Let assumptions (A1) and (A2) be satisfied. Then the <strong>for</strong>ms<br />
a h defined by ( 2.44), ah_S ( 2.45) ah_N or ( 2.46) ah_I satisfy the estimate<br />
|a h (u h ,v h )| ≤ c a |||u h ||| |||v h ||| ∀u h ,v h ∈ S hp . (2.92) A2.31<br />
Proof. Let u h ,v h ∈ S hp . Since S hp ⊂ H 2 (Ω, T h ), the estimate ( 2.83) Aa2.31 is valid<br />
<strong>for</strong> u h ,v h ∈ S hp . Moreover, ( 2.90) A2.30a and ( 2.26) eq:InvI imply that<br />
∑<br />
∫<br />
σ −1 (n · 〈∇v h 〉) 2 dS (2.93) A2.35a<br />
Γ ∈F ID Γ<br />
h<br />
≤ C HC M<br />
C W<br />
∑ (<br />
)<br />
C I ‖∇v h ‖ 2 L 2 (K) + ‖∇v h‖ 2 L 2 (K)<br />
K∈T h<br />
= C HC M<br />
(C I + 1) ∑<br />
‖∇v h ‖ L<br />
C 2 (K) = c|v h | 2 H 1 (Ω,T h ) ,<br />
W<br />
K∈T h<br />
where c = C H C M (C I + 1)/C W . Similarly,<br />
∑<br />
∫<br />
σ −1 (n · 〈∇u h 〉) 2 dS ≤ c|u h | 2 H 1 (Ω,T h ). (2.94) A2.35b<br />
Γ ∈F ID<br />
h<br />
Then, ( Aa2.31b 2.84), ( A2.35a 2.93) and ( A2.35b 2.94) imply that<br />
Γ<br />
‖u h ‖ 1,σ ≤ ( (1 + c)|u h | H1 (Ω,T h ) + J σ h (u h ,u h ) ) 1/2<br />
≤ (1 + c) 1/2 |||u h |||,(2.95) A2.36<br />
‖v h ‖ 1,σ ≤ ( (1 + c)|v h | H 1 (Ω,T h ) + J σ h (v h ,v h ) ) 1/2<br />
≤ (1 + c) 1/2 |||v h |||.<br />
This and( 2.83) Aa2.31 already yield ( 2.92) A2.31 with which proves lemma with c a = (1 +<br />
C H C M (C I + 1)/(2C W )).<br />
⊓⊔<br />
lem:Bhest<br />
Lemma 2.19. Let assumptions (A1) and (A2) be satisfied. Then the <strong>for</strong>ms<br />
B h defined by ( 2.50) A2.20a – ( 2.54) A2.20e satisfy the estimate<br />
|B h (u h ,v h )| ≤ C B |||u h ||| |||v h ||| ∀u h ,v h ∈ S hp , (2.96) A2.41<br />
where C B is a constant independent of u, v and h.<br />
Proof. i) Let the bilinear <strong>for</strong>m B h be defined by ( 2.50) A2.20a or ( 2.51). A2.20b Then ( 2.92)<br />
A2.31<br />
immediately yields ( 2.96) A2.41 with C B := c a .<br />
ii) Let the bilinear <strong>for</strong>m B h is defined by ( 2.52) A2.20c or ( 2.53) A2.20d or ( 2.54). A2.20e Then<br />
from ( 2.92) A2.31 we obtain<br />
|B h (u h ,v h )| = |a h (u h ,v h ) + Jh(u σ h ,v h )| ≤ c a |||u h ||| |||v h ||| + |Jh σ (u h ,v h )|,<br />
(2.97) A2.42<br />
where a h (·, ·) is the bilinear <strong>for</strong>m given either by ( 2.44) ah_S or ( 2.45) ah_N or ( 2.46).<br />
ah_I<br />
The Cauchy inequality implies that
26 2 Elliptic <strong>problems</strong><br />
|Jh σ (u h ,v h )| ≤ ∑ ∫<br />
Γ ∈F ID<br />
h<br />
⎛<br />
≤ ⎝ ∑<br />
Γ ∈F ID<br />
h<br />
Γ<br />
∫<br />
σ|[u h ][v h ]|dS (2.98) A2.43<br />
Γ<br />
⎞<br />
σ[u h ] 2 dS⎠<br />
1/2 ⎛<br />
= J σ h(u h ,u h ) 1/2 J σ h(v h ,v h ) 1/2 ,<br />
which together with ( en 2.68) and ( A2.42 2.97) gives<br />
⎝ ∑<br />
Γ ∈F ID<br />
h<br />
∫<br />
Γ<br />
⎞<br />
σ[v h ] 2 dS⎠<br />
|B h (u h ,v h )| ≤ c a |||u||| |||v||| + J σ h (u h ,u h ) 1/2 J σ h(v h ,v h ) 1/2<br />
≤ (c a + 1)|||u h ||| |||v h |||,<br />
which gives ( A2.41 2.96) with C B := c a + 1. ⊓⊔<br />
Remark 2.20. In the same way as in ( A2.43 2.98) it is possible to show that<br />
|J σ h (u,v)| = J σ h(u,u) 1/2 J σ h(v,v) 1/2 ∀u,v ∈ H 1 (Ω, T h ). (2.99) A2.J<br />
1/2<br />
coercofB<br />
lem:2.4<br />
2.4.2 Coercivity of the bilinear <strong>for</strong>ms<br />
Lemma 2.21. (NIPG coercivity) For any C W > 0 the bilinear <strong>for</strong>m B n,σ<br />
h<br />
defined by ( 2.53) A2.20d satisfies the coercivity condition<br />
B n,σ<br />
h (v,v) ≥ |||v|||2 ∀v ∈ H 2 (Ω, T h ). (2.100) A2.50<br />
Proof. From ( ah_N 2.45) and ( A2.20d 2.53) it follows immediately<br />
B n,σ<br />
h (v,v) = an h(v,v) + J σ h(v,v) = |v| 2 H 1 (Ω,T h ) + Jσ h (v,v) = |||v||| 2 .⊓⊔ (2.101) A2.51<br />
The proof of the coercivity of the symmetric bilinear <strong>for</strong>m B s,σ<br />
h<br />
complicated.<br />
is more<br />
Lemma 2.22. (SIPG coercivity) Let assumptions (A1) and (A2) be satis-<br />
fied, let<br />
C W ≥ 4C H C M (1 + C I ), (2.102) A3.40<br />
where C M , C I and C H are constants from ( 2.19), eq:MTI ( 2.26) eq:InvI and ( 2.18) A1.35 respectively,<br />
and let the penalty parametr σ be given by ( 2.69) A3.1 <strong>for</strong> all Γ ∈ Fh ID.<br />
Then<br />
B s,σ<br />
h (v h,v h ) ≥ 1 2 |||v h||| 2 ∀v h ∈ S hp , ∀h ∈ (0,h 0 ). (2.103) A3.41<br />
lem:2.8<br />
Proof. Let δ > 0, then from ( ah_S 2.44) and the Cauchy and Young’s inequalities<br />
it follows that
2.4 Properties of the bilinear <strong>for</strong>ms 27<br />
a s h(v h ,v h ) (2.104) A3.42<br />
= |v h | 2 H 1 (Ω,T h ) − 2 ∑ ∫<br />
n · 〈∇v h 〉[v h ]dS<br />
Γ ∈F ID<br />
h<br />
Γ<br />
≥ |v h | 2 H 1 (Ω,T h )<br />
⎧<br />
⎨<br />
1 ∑<br />
−2<br />
⎩δ<br />
Γ ∈F ID<br />
h<br />
∫<br />
Γ<br />
≥ |v h | 2 H 1 (Ω,T h ) − ω −<br />
⎫1/2 ⎧<br />
⎬ ⎨<br />
h Γ (n · 〈∇v h 〉) 2 dS<br />
⎭ ⎩ δ ∑<br />
δ<br />
C W<br />
J σ h (v h ,v h ),<br />
Γ ∈F ID<br />
h<br />
∫<br />
Γ<br />
⎫<br />
1<br />
⎬<br />
[v h ] 2 dS<br />
h Γ ⎭<br />
1/2<br />
where<br />
ω = 1 δ<br />
∑<br />
Γ ∈F ID Γ<br />
h<br />
Further, from ( 2.69), A3.1 ( 2.81),( A3.7 2.19) eq:MTI and ( 2.26), eq:InvI we get<br />
ω ≤ C H<br />
δ<br />
≤ C HC M<br />
δ<br />
∑<br />
∫<br />
h Γ |〈∇v h 〉| 2 dS. (2.105) A3.43<br />
h K ‖v h ‖ 2 L 2 (∂K) (2.106) A3.44<br />
K∈T h<br />
∑ (<br />
)<br />
h K |v h | H1 (K)|∇v h | H1 (K) + h −1<br />
K |v h| 2 H 1 (K)<br />
K∈T h<br />
≤ C HC M (1 + C I )<br />
|v h | 2 H<br />
δ<br />
1 (Ω,T h ) .<br />
Now let us choose<br />
δ = 2C H C M (1 + C I ). (2.107) A3.45<br />
then it follows from ( 2.102) A3.40 and ( 2.104) A3.42 – ( 2.107) A3.45 that<br />
a s h(v h ,v h ) (2.108) A3.46<br />
≥ 1 (<br />
|v h | 2 H<br />
2<br />
1 (Ω,T h ) − 4C )<br />
HC M (1 + C I )<br />
J σ<br />
C<br />
h(v h ,v h )<br />
W<br />
≥ 1 (<br />
)<br />
|v h | 2 H<br />
2<br />
1 (Ω,T h ) − Jσ h(v h ,v h ) .<br />
Finally, from ( A2.20c 2.52) and ( A3.46 2.108) we have<br />
B s,σ<br />
h (v h,v h ) = a s h(v h ,v h ) + Jh σ (v h ,v h ) (2.109) A3.47<br />
≥ 1 (<br />
)<br />
|v h | 2 H<br />
2<br />
1 (Ω,T h ) + Jσ h(v h ,v h ) = 1 2 |||v h||| 2 ,<br />
which we wanted to prove.<br />
⊓⊔<br />
Lemma 2.23. (IIPG coercivity) Let assumptions (A1) and (A2) be satis-<br />
fied, let<br />
lem:2.8I
28 2 Elliptic <strong>problems</strong><br />
cor:2.9<br />
exer:coerc<br />
rem:ex_uni<br />
C W ≥ C H C M (1 + C I ), (2.110) A3.40I<br />
where C M , C I and C H are constants from ( 2.19), eq:MTI ( 2.26) eq:InvI and ( 2.18) A1.35 respectively,<br />
and let the penalty parametr σ be given by ( 2.69) A3.1 <strong>for</strong> all Γ ∈ Fh ID.<br />
Then<br />
B i,σ<br />
h (v h,v h ) ≥ 1 2 |||v h||| 2 ∀v h ∈ S hp . (2.111) A3.41I<br />
Proof. The proof is almost identical with the proof of Lemma 2.22. lem:2.8 ⊓⊔<br />
Corollary 2.24. We can summarize the above results in the following way.<br />
We have<br />
B h (v h ,v h ) ≥ C C |||v h ||| 2 ∀v h ∈ S hp , (2.112) A3.50<br />
with C C = 1 <strong>for</strong> B = B n,σ<br />
h<br />
if C W = 1, C C = 1/2 <strong>for</strong> B = B s,σ<br />
h<br />
if C W ≥<br />
4C H C M (1 + C I ) and C C = 1/2 <strong>for</strong> B = B i,σ<br />
h , if C W ≥ C H C M (1 + C I ).<br />
Exercise 2.25. Analyze the coercivity of the <strong>for</strong>m B n,σ<br />
h<br />
, Bs,σ h<br />
and B i,σ<br />
h<br />
with<br />
σ defined by ( 2.74) A3.1a or ( 2.76).<br />
A3.1c<br />
Remark 2.26. In virtue of the Lax-Milgram Lemma 1.3, lem:L-M the coercivity and<br />
continuity of the <strong>for</strong>m B h imply the existence and uniqueness of the solution<br />
of the discrete problem.<br />
sec:2.5<br />
2.5 Error estimates<br />
2.5.1 SIPG, NIPG and IIPG methods<br />
In this section we shall prove a priori error estimates <strong>for</strong> the discontinuous<br />
Galerkin method. If u and u h denote the exact solution of problem ( 2.1) A0.1 –<br />
( 2.5) A0.3 and the approximate solution obtained by method ( 2.66), A2.23 respectively,<br />
we define the error e h = u h − u. It can be written in the <strong>for</strong>m<br />
lem:2.6<br />
e h = η + ξ, with η = Π hp u − u, ξ = u h − Π hp u ∈ S hp , (2.113) A3.22a<br />
where Π hp is the S hp -interpolation defined by ( 2.32). eq:Pi_h The estimation of the<br />
error e h will be carried out in several steps.<br />
In this whole section we shall suppose that assumptions (A1) and (A2) are<br />
satisfied.<br />
Lemma 2.27. Let us assume that s ≥ 1,p ≥ 1 are integers, u ∈ H s (Ω),<br />
η = u − Π hp u and µ = min(p + 1,s). Then<br />
∑<br />
h −1<br />
K ‖η‖2 L 2 (∂K) ≤ 2C MCAh 2 2µ−2 |u| 2 H µ (Ω), (2.114) A3.29b<br />
K∈T h<br />
∑<br />
h K ‖∇η‖ 2 L 2 (∂K) ≤ 2C MCAh 2 2µ−2 |u| 2 H µ (Ω,T h ), (2.115) A3.29a<br />
K∈T h<br />
Jh σ (η,η) ≤ CJh 2 2µ−2 |u| 2 H µ (Ω). (2.116) A3.29c<br />
|||η||| 2 ≤ (CA 2 + CJ)h 2 2µ−2 |u| 2 H µ (Ω), (2.117) A3.29d
2.5 Error estimates 29<br />
lem:2.7<br />
where C J = 2C A<br />
√<br />
CW C M .<br />
Proof. i) Using the multiplicative trace inequality ( 2.19) eq:MTI and ( 2.30), eq:ap we obtain<br />
∑<br />
h −1<br />
K ‖η‖2 L 2 (∂K) (2.118) A3.23<br />
K∈T h<br />
∑ (<br />
)<br />
≤ C M K<br />
h −1<br />
K ‖η‖2 L 2 (K) + ‖η‖ L 2 (K)|η| H1 (K)<br />
≤ C M C 2 A<br />
K∈T h<br />
h −1<br />
∑<br />
h −1<br />
K<br />
K∈T h<br />
≤ 2C M CAh ∑ 2 2µ−2 |u| 2 H µ (K) ,<br />
K∈T h<br />
which proves ( 2.114).<br />
A3.29b<br />
ii) Similarly, by ( 2.19) eq:MTI and ( 2.30), eq:ap we have<br />
∑<br />
(<br />
)<br />
h −1<br />
K h2µ K + hµ K hµ−1 K<br />
|u| 2 H µ (K)<br />
h K ‖∇η‖ 2 L 2 (∂K) (2.119) A3.23+<br />
K∈T h<br />
∑ (<br />
)<br />
≤ C M h K h −1<br />
K ‖∇η‖2 L 2 (K) + ‖∇η‖ L 2 (K)|∇η| H 1 (K)<br />
K∈T h<br />
∑ ( )<br />
= C M |η|H1 (K) + h K |η| H1 (K)|η| H2 (K)<br />
K∈T h<br />
≤ 2C M CAh 2 2µ−2 |u| 2 H µ (K) ,<br />
iii) By ( 2.77) A3.4 and ( 2.80),<br />
A3.6<br />
Jh σ (η,η) = ∑ ∫<br />
σ[η] 2 dS (2.120) A3.30<br />
≤<br />
∑<br />
Γ ∈F ID<br />
h<br />
Γ ∈F ID<br />
h<br />
Γ<br />
C W<br />
h Γ<br />
‖[η]‖ 2 L 2 (Γ) ≤ 2C W<br />
∑<br />
K∈T h<br />
1<br />
h K<br />
‖η‖ 2 L 2 (∂K) ,<br />
which together with ( 2.114) A3.29b gives ( 2.116).<br />
A3.29c<br />
iv) Inequality ( 2.117) A3.29d immediately follows from ( 2.68), en ( 2.34) eq:AP and ( 2.116).<br />
A3.29c<br />
⊓⊔<br />
Lemma 2.28. Let us assume that s ≥ 1,p ≥ 1 are integers, u ∈ H s (Ω),<br />
µ = min(p + 1,s) and a h (·, ·) is a bilinear <strong>for</strong>m defined by ( 2.44) ah_S or ( 2.45) ah_N or<br />
( 2.46). ah_I Then there exists a constant C a > 0 such that<br />
and,<br />
|a h (Π hp u − u,v h )| ≤ C a h µ−1 |u| Hµ (Ω)|||v h ||| ∀v h ∈ S hp , (2.121) A4.a<br />
|Jh σ (Π hp u − u,v h )| ≤ C J h µ−1 |u| Hµ (Ω)|||v h ||| ∀v h ∈ S hp ,(2.122) A4.j<br />
where the constant C J was introduced in Lemma 2.27.<br />
lem:2.6
30 2 Elliptic <strong>problems</strong><br />
Proof. i) Let us use the notation η = Π hp u − u. In view of ( 2.44) ah_S – ( 2.46), ah_I we<br />
can write<br />
a h (η,v h ) = χ 1 + χ 2 , (2.123) A4.8<br />
χ 1 := ∑<br />
∇η · ∇v h dx,<br />
χ 2 := −<br />
K∈T h<br />
∫K<br />
∑<br />
Γ ∈F ID<br />
h<br />
∫<br />
Γ<br />
(<br />
)<br />
n · 〈∇η〉[v h ] + θn · 〈∇v h 〉[η] dS,<br />
where θ = +1, −1,0 in dependence on the used variant ( 2.44) ah_S – ( 2.46). ah_I We<br />
estimate the individual terms in ( 2.123). A4.8 Using the Cauchy inequality and<br />
( 2.34), eq:AP we get<br />
|χ 1 | ≤ |η| H1 (Ω,T h )|v h | H1 (Ω,T h ) (2.124) A4.9<br />
≤ C A h µ−1 |u| H µ (Ω)|v h | H 1 (Ω,T h ),<br />
where µ = min(p + 1,s).<br />
Moreover, if we proceed similarly as in the proof of Lemma 2.27, lem:2.6 use the<br />
Cauchy inequality, the inequality<br />
( A3.5 2.73) and ( A3.4 2.77), we obtain the estimates<br />
⎛<br />
|χ 2 | ≤ ⎝ ∑<br />
≤<br />
Γ ∈F ID<br />
h<br />
∫<br />
⎛<br />
+ ⎝ ∑<br />
(<br />
+<br />
Γ ∈F ID<br />
h<br />
C H<br />
∑<br />
(<br />
(δ + γ) 2 ≤ 2(δ 2 + γ 2 ), δ,γ ∈ IR, (2.125) AC3.6a<br />
Γ<br />
⎞<br />
h Γ |〈∇η〉| 2 dS⎠<br />
∫<br />
Γ<br />
1/2 ⎛<br />
⎞<br />
h Γ |〈∇v h 〉| 2 dS⎠<br />
K∈T h<br />
h K ‖∇η‖ 2 L 2 (∂K)<br />
C H<br />
∑<br />
By ( A3.29a 2.115), we have<br />
( ∑<br />
K∈T h<br />
h K ‖∇v h ‖ 2 L 2 (∂K)<br />
⎝ ∑<br />
Γ ∈F ID<br />
h<br />
1/2 ⎛<br />
∫<br />
⎝ ∑<br />
Γ<br />
Γ ∈F ID<br />
h<br />
⎞<br />
1<br />
[v h ] 2 dS⎠<br />
h Γ<br />
∫<br />
) 1/2<br />
J σ h (v h ,v h ) 1/2 C −1/2<br />
Γ<br />
1/2<br />
⎞<br />
1<br />
[η] 2 dS⎠<br />
h Γ<br />
W<br />
) 1/2<br />
J σ h(η,η) 1/2 C −1/2<br />
W .<br />
(2.126) A4.10<br />
) 1/2<br />
≤ √ 2C M C A h µ−1 |u| H µ (Ω), (2.127) A4.12<br />
1/2<br />
K∈T h<br />
h K ‖∇η‖ 2 L 2 (∂K)<br />
From ( eq:MTI 2.19) and ( eq:InvI 2.26), where we put v := |∇v h |, we get
∑<br />
2.5 Error estimates 31<br />
h K ‖∇v h ‖ 2 L 2 (∂K) (2.128) A4.13<br />
K∈T h<br />
∑ (<br />
)<br />
≤ C M ‖∇v h ‖ 2 L 2 (K) + h K‖∇v h ‖ L 2 (K)|∇v h | H 1 (K)<br />
K∈T h<br />
∑ (<br />
)<br />
≤ C M ‖∇v h ‖ 2 L 2 (K) + C I‖∇v h ‖ 2 L 2 (K)<br />
K∈T h<br />
= C M (1 + C I ) ∑<br />
|v h | 2 H 1 (K) = C M(1 + C I )|v h | 2 H 1 (Ω,T h ) .<br />
K∈T h<br />
Finally, ( A4.12 2.127), ( A4.13 2.128) and ( A3.29c 2.116) imply that<br />
|χ 2 | ≤ √ 2C H C M C A h µ−1 |u| Hµ (Ω)J σ h(v h ,v h ) 1/2 C −1/2<br />
W<br />
(2.129) A4.14<br />
+C −1/2<br />
W<br />
(C HC M (1 + C I )) 1/2 |v h | H 1 (Ω,T h )C J h µ−1 |u| H µ (Ω).<br />
There<strong>for</strong>e, from ( 2.68), en ( 2.124), A4.9 ( 2.129), A4.14 ( 2.125) AC3.6a<br />
√<br />
and the relation C J =<br />
2C A CW C M we obtain<br />
|χ 1 | + |χ 2 | ≤ C A h µ−1 |u| H µ (Ω)|v h | H 1 (Ω,T h )<br />
+C A (C H C M /C W ) 1/2 h µ−1 |u| Hµ (Ω)J σ h(v h ,v h ) 1/2<br />
+(C H C M (1 + C I )) 1/2 C J h µ−1 |u| H µ (Ω)|v h | H 1 (Ω,T h )<br />
(<br />
≤ C A + (C H C M (1 + C I )) 1/2 2C A (C W C M ) 1/2 |v h | H1 (Ω,T h )<br />
+C A (C H C M /C W ) 1/2 J σ h (v h ,v h ) 1/2) h µ−1 |u| H µ (Ω)<br />
≤ ˜Ch µ−1 |u| Hµ (Ω)(|v h | H1 (Ω,T h ) + J σ h(v h ,v h ) 1/2 ) ≤ √ 2h µ−1 |u| Hµ (Ω)|||v h |||,<br />
where ˜C = C A max(1 + √ 2(C H C M (1 + C I )C W C M ) 1/2 ,(C H C M /C W ) 1/2 ).<br />
Hence, we have ( 2.121) A4.a with C a = √ 2 ˜C.<br />
ii) Using ( 2.99), A2.J ( 2.116) A3.29c and ( 2.68), en we find that<br />
|J σ h (η,v h )| ≤ J σ h (η,η) 1/2 J σ h(v h ,v h ) 1/2 ≤ C J h µ−1 |u| H µ (Ω) |||v h |||. (2.130) A2.14b<br />
⊓⊔<br />
lem:2.10<br />
Theorem 2.29. (||| · |||-norm error estimate) Let us assume that s ≥ 1, u ∈<br />
H s (Ω) is the solution of problem ( 2.1) A0.1 – ( 2.5), A0.3 {T h } h∈(0,h0) is a system of<br />
triangulations of the domain Ω satisfying assumtions (A1) and (A2), S hp is<br />
the space of discontinuous piecewise polynomial functions ( 2.16)and A1.23 u h ∈ S hp<br />
the approximate solution obtained by means of the SIPG method ( 2.62) A2.22c with<br />
C W satisfying ( 2.102) A3.40 or NIPG method ( 2.63) A2.22d with C W > 0 or IIPG method<br />
( 2.64) A2.22e with C W satisfying ( 2.110). A3.40I Then<br />
|||e h ||| ≤ ˜Ch µ−1 |u| Hµ (Ω,T h ), h ∈ (0,h 0 ), (2.131) A4.1<br />
where e h = u h − u, µ = min(p + 1,s) and ˜C is a constant independent of h.
32 2 Elliptic <strong>problems</strong><br />
Proof. We express the error by ( 2.113), A3.22a i.e. e h = u h − u = η + ξ. By B<br />
we denote the <strong>for</strong>m B n,σ<br />
h<br />
or B s,σ<br />
h<br />
or B i,σ<br />
h . The error e h satisfies the Galerkin<br />
orthogonality ( 2.67), A2.23a which is equivalent to<br />
B h (ξ,v h ) = −B h (η,v h ) ∀v h ∈ S hp . (2.132) A4.5<br />
If we set v h := ξ ∈ S hp in ( 2.132) A4.5 and use ( 2.52) A2.20c – ( 2.54) A2.20e and the coercivity<br />
( 2.112), A3.50 we find that<br />
C C |||ξ||| 2 ≤ |a h (ξ,η)| + |Jh σ (η,ξ)|, (2.133) A4.6<br />
where C C is the constant from Corollary 2.24 cor:2.9 and a h (·, ·) is given by either<br />
( 2.44) ah_S or ( 2.45) ah_N or ( 2.46).<br />
ah_I<br />
Now we shall estimate the individual terms on the right-hand side of<br />
( 2.133). A4.6 The estimate ( 2.121) A4.a gives<br />
|a h (η,ξ)| ≤ C a h µ−1 |u| Hµ (Ω)|||ξ|||. (2.134) A4.00<br />
Furthermore, in view of the Cauchy inequality, ( 2.68) en and ( 2.116),<br />
A3.29c<br />
|J σ h (η,ξ)| ≤ (J σ h (η,η)) 1/2 (J σ h (ξ,ξ)) 1/2 (2.135) A4.15<br />
≤ C J h µ−1 |u| H µ (Ω) |||ξ|||.<br />
Using ( 2.133) A4.6 – ( 2.135), A4.15 we get<br />
|||ξ||| 2 ≤ (C a + C J )C −1<br />
C hµ−1 |u| H µ (Ω)|||ξ|||, (2.136) A4.17<br />
which gives<br />
|||ξ||| ≤ ¯Ch µ−1 |u| H µ (Ω) (2.137) A4.18<br />
with ¯C = (C a + C J )/C C . Finally, ( 2.68), en ( 2.113), A3.22a the triangle inequality<br />
|||e h ||| ≤ |||ξ||| + |||η|||, (2.138) A4.17a<br />
( 2.117) A3.29d and ( 2.137) A4.18 imply that<br />
|||e h ||| ≤ ¯Ch µ−1 |u| H µ (Ω) + (C 2 A + C 2 J) 1/2 h µ−1 |u| H µ (Ω). (2.139) A4.19<br />
Hence, ( 2.131) A4.1 holds with ˜C = (C a +C J )C −1<br />
C +(C2 A +C2 J )1/2 and the theorem<br />
is proved.<br />
⊓⊔<br />
In order to derive an error estimate in the L 2 (Ω)-norm we present the<br />
following result.<br />
lem:2.11<br />
Lemma 2.30. (Broken Poincaré inequality) Let the system {T h } h∈(0,h0)<br />
of triangulations satisfy the assumptions (A1) and (A2). Then there exists a<br />
constant C independent of h and v h such that<br />
⎛<br />
⎞<br />
‖v h ‖ 2 L 2 (Ω) ≤ C ⎝ ∑<br />
|v h | 2 H 1 (K) + ∑ 1<br />
d(Γ) ‖[v h]‖ 2 ⎠<br />
L 2 (Γ) (2.140) A4.31<br />
K∈T h<br />
∀v h ∈ S hp , ∀h ∈ (0,h 0 ).<br />
Γ ∈F ID<br />
h
2.5 Error estimates 33<br />
The proof of the broken Poincaré inequality ( 2.140) A4.31 was carried out in [Arn82]<br />
Arnold<br />
in the case that ∂Ω D = ∂Ω and Ω is a convex polygonal domain. Inequality<br />
( 2.140) A4.31 in a general case with nonempty Neumann part of the boundary is a<br />
consequence of [Bre03].<br />
SCBrenner<br />
From Theorem 2.29 lem:2.10 and Lemma 2.30 lem:2.11 we immediatly obtain the following<br />
result.<br />
cor:2.12<br />
Corollary 2.31. (L 2 (Ω)-(suboptimal) error estimate) Let assumptions<br />
of Theorem 2.29 lem:2.10 be satisfied. Then<br />
‖e h ‖ L 2 (Ω) ≤ Ch µ−1 |u| H µ (Ω), h ∈ (0,h 0 ), (2.141) A4.32<br />
where C is a constant independent of h. Hence, if s = p + 1, we get the error<br />
estimates<br />
rem_subopt<br />
|||e h ||| ≤ ˜Ch p |u| H p+1 (Ω), (2.142) A4.32a<br />
‖e h ‖ L2 (Ω) ≤ Ch p |u| H p+1 (Ω). (2.143) A4.32b<br />
Remark 2.32. The error estimate ( 2.142, A4.32a which is the order of O(h p ), is subotimal<br />
with respect to the approximation property of the piecewise polynomial<br />
space S hp with q = 0, µ = s = p + 1, (cf. 2.34) eq:AP giving the order O(h p+1 ). In<br />
Section 2.6 sec-optL2 we shall prove an optimal error estimates in the L 2 (Ω)-norm <strong>for</strong><br />
SIPG method using the Aubin-Nitsche technique.<br />
2.5.2 Baumann-Oden method<br />
Let us consider the Baumann-Oden scheme ( 2.61). A2.22b Hence, we seek u h ∈ S hp<br />
such that<br />
B h (u h ,v h ) = l h (v h ) ∀v h ∈ S hp , (2.144) A7.1<br />
where B h (·, ·) and l h are given by ( 2.51) A2.20b and ( 2.56), A2.21b respectively:<br />
B h (u,v) = ∑<br />
K∈T h<br />
∫K<br />
−<br />
∫<br />
l h (v) =<br />
Ω<br />
∑<br />
Γ ∈F ID<br />
h<br />
∇u · ∇v dx (2.145) A7.2<br />
∫<br />
Γ<br />
f v dx + ∑<br />
(n · 〈∇u〉 [v] − n · 〈∇u〉 [v]) dS,<br />
Γ ∈F N h<br />
∫<br />
Γ<br />
g N v dS − ∑<br />
Γ ∈F D h<br />
∫<br />
Γ<br />
(n · ∇v)u D dS,<br />
This method was presented and analysed <strong>for</strong> one-dimensional diffusion<br />
problem in [BBO99]. bbo In [RWG99], RWG99 Rivière, Wheeler, and Girault showed how<br />
to obtain error estimates under the assumption that the polynomial degree<br />
p ≥ 2 and the mesh is con<strong>for</strong>ming. The analysis carried out in [RWG99]<br />
RWG99<br />
(Lemma 5.1) is based on the existence of an interpolation operator I hp :<br />
H 2 (Ω, T h ) → S hp , <strong>for</strong> p ≥ 2 such that
34 2 Elliptic <strong>problems</strong><br />
∫<br />
〈∇(v − I hp v)〉 · n dS = 0 ∀Γ ∈ F h , v ∈ H 2 (Ω, T h ), (2.146) A7.3<br />
Γ<br />
|I hp v − v| H q (Ω,T h ) ≤ ¯C A h µ−q |v| H µ (Ω,T h ), v ∈ H s (Ω, T h ), h ∈ (0,h (2.147) 0 ), A7.3a<br />
where µ = min(p + 1,s), q = 0,1 and ¯C A is a constant.<br />
Let u ∈ H s (Ω) (s ≥ 1 is an integer) be an exact solution of ptoblem ( 2.1)<br />
A0.1<br />
– ( 2.2). A0.2a Then, in view of ( 2.145) A7.2 and ( 2.146),<br />
A7.3<br />
B h (u − I hp u,v h ) = 0 ∀v h ∈ S h0 , (2.148) A7.4<br />
where S h0 denotes the space of piecewise constant fucntions on T h . Hence, if<br />
Π 0 is the orthogonal projection of L 2 (Ω) onto S h0 , then ( 2.96) A2.41 and ( 2.148)<br />
A7.4<br />
imply that<br />
|B h (u − I hp u,v h )| ≤ ∣ ∣ Bh (u − I hp u,v h − Π 0 v h ) ∣ ∣ +<br />
∣ ∣Bh (u − I hp u,Π 0 v h ) ∣ ∣<br />
≤ C B |||u − I hp u||| |||v h − Π 0 v h ||| ∀v h ∈ S hp . (2.149) A7.5<br />
Obviously,<br />
|u − Π 0 u| H 1 (K) = |u| H 1 (K), K ∈ T h . (2.150) A7.6a<br />
Moreover, it follows from the approximation properties ( 2.34) eq:AP that<br />
‖v − Π 0 v‖ L 2 (K) ≤ C A h K |v| H 1 (K), v ∈ H 1 (K), K ∈ T h . (2.151) A7.6<br />
Let ψ ∈ H 1 (Ω, T h ). Then, using ( eq:MTI 2.19) and ( A3.30 2.120), we find that<br />
|||ψ||| 2 = |ψ| 2 H 1 (Ω,T h ) + Jσ h(ψ,ψ)<br />
∑<br />
(2.152) A7.7<br />
≤ |v| 2 H 1 (Ω,T h ) + 2C W h −1<br />
K ‖ψ‖2 L 2 (∂K)<br />
K∈T h<br />
≤ |ψ| 2 H 1 (Ω,T h ) +2C WC M<br />
∑<br />
K∈T h<br />
(<br />
h −2<br />
K ‖ψ‖2 L 2 (K) + h−1 K ‖ψ‖ L 2 (K)|ψ| H1 (K)<br />
For v ∈ H 1 (Ω, T h ) let us set ψ := v − Π 0 v in ( 2.152). A7.7 Then from ( 2.150) A7.6a –<br />
( 2.151) A7.6 we get<br />
|||v − Π 0 v||| 2 ≤ (1 + 4CAC 2 W C M ) ∑<br />
|v| 2 H 1 (K) (2.153) A7.8<br />
K∈T h<br />
= (1 + 4C 2 AC W C M )|v| 2 H 1 (Ω,T h ) .<br />
On the other hand, if we set ψ := u − I hp u, then by ( 2.152) A7.7 and ( 2.147)<br />
A7.3a<br />
we obtain<br />
)<br />
.<br />
|||u − I hp u||| 2 ≤ ¯C 2 Ah 2µ−2 |u| 2 H µ (Ω + 4 ¯C 2 AC W C M h 2µ−2 |u| 2 H µ (Ω)<br />
= ¯C 2 A(1 + 4C W C M )h 2µ−2 |u| 2 H µ (Ω) .<br />
(2.154) A7.9
2.6 L 2 (Ω)-optimal error estimate 35<br />
If we denote by u h ∈ S hp , p ≥ 2 an approvimate solution obtained from<br />
( 2.144), A7.1 then from the definition ( 2.145) A7.2 of the <strong>for</strong>m B h and the Galerkin<br />
orthogonality ( 2.67) A2.23a we conclude that<br />
|I hp u − u h | 2 H 1 (Ω,T h ) = B h(I hp u − u h ,I hp u − u h ) = B h (I hp u − u,I hp u − u h ).<br />
(2.155) A7.10<br />
Putting v h := I hp u − u h in ( 2.149) A7.5 and using ( 2.153) A7.8 – ( 2.154), A7.9 we have<br />
|B h (I hp u − u,I hp u − u h )| (2.156) A7.11<br />
≤ C B |||u − I hp u||| |||I hp u − u h − Π 0 (I hp u − u h )|||<br />
√ √<br />
≤ C B ¯CA 1 + 4CW C M h µ−1 |u| Hµ (Ω) 1 + 4CA 2 C WC M |I hp u − u h | H1 (Ω,T h ).<br />
This and ( A7.10 2.155) imply that<br />
|I hp u − u h | H1 (Ω,T h ) ≤ c ∗ h µ−1 |u| Hµ (Ω), (2.157) A7.12<br />
√ √<br />
where c ∗ = C B ¯CA 1 + 4CW C M 1 + 4C<br />
2<br />
A<br />
C W C M . Now, by the triangle inequality<br />
and and ( 2.147) A7.3a we finally get the error estimate of the Bauman-Oden<br />
method under the assumptions (A1), (A2), p ≥ 2 and u ∈ H s (Ω):<br />
|u − u h | H1 (Ω,T h ) ≤ |u − I hp u| H1 (Ω,T h ) + |I hp u − u h | H1 (Ω,T h ) (2.158) A7.13<br />
≤ ( ¯C A + c ∗ )h µ−1 |v| H µ (Ω)<br />
sec-optL2<br />
2.6 L 2 (Ω)-optimal error estimate<br />
In this section we shall consider the SIPG method applied to problem ( 2.1) A0.1 –<br />
( 2.5). A0.3 Our goal will be to prove the an optimal order of convergence in the L 2 -<br />
norm, which is possible by using the standard duality argument. There<strong>for</strong>e, <strong>for</strong><br />
an arbitrary z ∈ L 2 (Ω) we shall consider the dual problem: Given z ∈ L 2 (Ω),<br />
find ψ such that<br />
Under the notation<br />
a) − ∆ψ = z in Ω,<br />
b)ψ| ΓD = 0, (2.159) A8.1<br />
c) ∂ψ<br />
∣ = 0.<br />
∂n ΓN<br />
V = { v ∈ C ∞ }<br />
(Ω), suppv ⊂ Ω ∪ Γ N , (2.160) A8.2<br />
the weak <strong>for</strong>mulation of ( 2.160) A8.2 reads: Find ψ ∈ H 1 (Ω) such that ψ| ΓD = 0<br />
and<br />
(∇ψ, ∇v) = (z,v) ∀v ∈ V. (2.161) A8.3<br />
Let us assume that ψ ∈ H 2 (Ω) and there exists a constant ¯c > 0, independent<br />
of z such that
36 2 Elliptic <strong>problems</strong><br />
‖ψ‖ H 2 (Ω) ≤ ¯c‖z‖ L 2 (Ω). (2.162) A8.4<br />
This is true, provided the domain Ω is convex and Γ N = ∅, as follows from<br />
grisvard<br />
[Gri92]. Let us note that H 2 (Ω) ⊂ C(Ω).<br />
Let B h (·, ·) be the symmetric bilinear <strong>for</strong>m given by ( 2.52), A2.20c i.e.<br />
lem:2.13<br />
B h (u,v) = a s h(u,v) + Jh σ (u,v), u,v ∈ H 2 (Ω, T h ), (2.163) A8.5<br />
where a s h and Jσ h<br />
are defined by (ah_S 2.44) and ( 2.77), A3.4 respectively. Let us assume<br />
that the constant C W satisfies condition ( 2.102).<br />
A3.40<br />
Theorem 2.33. (L 2 (Ω)-optimal error estimate) Let us assume that u ∈<br />
H s (Ω),s ≥ 1, is the solution of problem ( 2.1) A0.1 – ( 2.3), A0.2b the system {T h } h∈(0,h0)<br />
of triangulation of Ω satisfies assumptions (A1) and (A2), S hp is the space of<br />
discontinuous piecewise polynomial functions ( 2.16)and A1.23 u h ∈ S hp the approximate<br />
solution of problem ( 2.1) A0.1 – ( 2.3) A0.2b obtained by the SIPG method ( 2.62).<br />
A2.22c<br />
Let the weight σ from the penaly terms be defined by ( 2.69) A3.1 – ( 2.70) A3.2 with a<br />
constant C W satisfying ( 2.102). A3.40 Let there exist the weak solution of problem<br />
( 2.159) A8.1 from H 2 (Ω) satisfying ( 2.162). A8.4 Then<br />
‖e h ‖ L 2 (Ω) ≤ C 3 h µ |u| H µ (Ω) (2.164) A8.20<br />
where e h = u h − u, C 3 is a constant independent of h and µ = min{p + 1,s}.<br />
Proof. Let ψ ∈ H 2 (Ω) be the solution of the dual problem ( 2.161) A8.3 with z :=<br />
e h = u h − u ∈ L 2 (Ω) and let Π h1 ψ ∈ S h1 be the approximation of ψ defined<br />
by ( 2.32) eq:Pi_h with p = 1. Taking into account the regularity of the solution ψ of<br />
problem ( 2.159), A8.1 we can show that<br />
B h (ψ,v) = (u h − u,v) L2 (Ω) ∀v ∈ H 2 (Ω, T h ). (2.165) AB.1<br />
The symmetry of B h (·, ·), the Galerkin orthogonality of the error ( 2.67) A2.23a and<br />
( 2.165) AB.1 with v := e h yield<br />
‖e h ‖ 2 L 2 (Ω) = B h(ψ,u h − u) = B h (u h − u,ψ) (2.166) AB.2<br />
= B h (u h − u,ψ − Π h1 ψ) = B h (e h ,ψ − Π h1 ψ).<br />
Moreover, from ( 2.52), A2.20c ( 2.83) Aa2.31 and ( 2.99) A2.J it follows that<br />
B h (e h ,ψ − Π h1 ψ) (2.167) AB.3<br />
= a s h(e h ,ψ − Π h1 ψ) + J σ h(e h ,ψ − Π h1 ψ)<br />
≤ ‖e h ‖ 1,σ ‖ψ − Π h1 ψ‖ 1,σ + J σ h(e h ,e h ) 1/2 J σ h(ψ − Π h1 ,ψ − Π h1 ψ) 1/2 ,<br />
where<br />
‖v‖ 2 1,σ = |v| 2 H 1 (Ω,T h ) + Jσ h (v,v) + ∑<br />
= |||v||| + ∑<br />
Γ ∈F ID<br />
h<br />
∫<br />
Γ<br />
Γ ∈F ID<br />
h<br />
∫<br />
Γ<br />
σ −1 (n · 〈∇v〉) 2 dS.<br />
σ −1 (n · 〈∇v〉) 2 dS (2.168)<br />
AB.4
2.6 L 2 (Ω)-optimal error estimate 37<br />
Obviously, ( en 2.68), the assumption ψ ∈ H 2 (Ω), ( A3.29d 2.117) and ( A4.1 2.131) imply<br />
Jh(e σ h ,e h ) 1/2 Jh(ψ σ − Π h1 ,ψ − Π h1 ψ) 1/2 (2.169) AB.4a<br />
≤ |||e h ||| |||ψ − Π h1 ψ||| ≤ ˜C<br />
√<br />
CA 2 + C2 J |ψ| H 2 (Ω) h µ |u| H µ (Ω).<br />
Further, using ( 2.90), A2.30a ( 2.19), eq:MTI ( 2.30) eq:ap and the assumption ψ ∈ H 2 (Ω), we<br />
find that<br />
∑<br />
∫<br />
σ −1 (n · 〈∇(ψ − Π h1 ψ)〉) 2 dS (2.170) AB.5<br />
Γ ∈F ID<br />
h<br />
≤ C HC M<br />
C W<br />
Γ<br />
∑<br />
≤ 2C HC M C 2 A<br />
C W<br />
(<br />
h K ‖∇(ψ − Πh1 ψ)‖ L2 (K) |∇(ψ − Π h1 ψ)| H1 (K)<br />
K∈T h<br />
)<br />
+h −1<br />
K ‖∇(ψ − Π h1ψ)‖ 2 L 2 (K)<br />
∑<br />
h 2 K|ψ| 2 H 2 (K) ≤ 2C HC M CA<br />
2 h 2 |ψ| 2 H<br />
C 2 (Ω) .<br />
W<br />
K∈T h<br />
Thus, ( AB.4 2.168), ( eq:AP 2.34) (where we set µ = 2), ( A3.29c 2.116) and ( AB.5 2.170) imply<br />
‖ψ − Π h1 ψ‖ 2 1,σ ≤ CAh 2 2 |ψ| H2 (Ω) + CJh 2 2 |ψ| H2 (Ω) + 2C HC M CA<br />
2 h 2 |ψ| 2 H<br />
C 2 (Ω)<br />
W<br />
≤ c 2 2h 2 |ψ| H 2 (Ω), (2.171) AB.6<br />
where c 2 2 = C 2 A (1 + 2C HC M /C W ) + C 2 J .<br />
Now, the inverse inequality ( eq:InvI 2.26) and ( eq:ap 2.30) imply that<br />
|∇e h | H1 (K) = |∇(u − u h )| H1 (K) (2.172) AB.8<br />
≤ |∇(u − Π hp u)| H 1 (K) + |∇(Π hp u − u h )| H 1 (K)<br />
≤ |u − Π hp u| H 2 (K) + C I h −1<br />
K ‖Π hpu − u h ‖ H 1 (K)<br />
≤ C A h µ−2<br />
K<br />
|u| H µ (K) + C I h −1 (<br />
K ‖Πhp u − u‖ H 1 (K) + ‖u − u h ‖ H (K))<br />
1<br />
≤ C A (1 + C I )h µ−2<br />
K<br />
|u| H µ (K) + C I h −1<br />
K ‖e h‖ H1 (K).<br />
By ( 2.90), A2.30a ( 2.172) AB.8 and the discrete Cauchy inequality,<br />
∑<br />
∫<br />
σ −1 (n · 〈∇e h 〉) 2 dS (2.173) AB.7<br />
Γ ∈F ID<br />
h<br />
≤ C HC M<br />
C W<br />
Γ<br />
∑ (<br />
)<br />
h K ‖∇e h ‖ L 2 (K) |∇e h | H 1 (K) + h −1<br />
K ‖∇e h‖ 2 L 2 (K)<br />
K∈T h<br />
≤ C HC M<br />
C W<br />
{<br />
C A (1 + C I )h µ−1 |e h | H1 (Ω,T h )|u| Hµ (Ω) + (1 + C I )|e h | 2 H 1 (Ω,T h )<br />
Since |e h | H 1 (Ω,T h ) ≤ |||e h |||, in virtue of ( A4.1 2.131) and ( AB.7 2.173) we have<br />
}<br />
.
38 2 Elliptic <strong>problems</strong><br />
∑<br />
∫<br />
Γ ∈F ID<br />
h<br />
Γ<br />
σ −1 (n · 〈∇e h 〉) 2 dS (2.174) AB.9<br />
≤ C HC M<br />
C W<br />
˜C(1 + CI )(1 + C A )h 2µ−2 |u| 2 H µ (Ω) .<br />
This and ( 2.168) AB.4 yield the estimate<br />
{<br />
‖e h ‖ 2 1,σ ≤ ˜C 1 + C }<br />
HC M<br />
(1 + C I )(1 + C A ) h 2µ−2 |u| 2 H<br />
C (Ω). W<br />
(2.175) AB.11<br />
It follows from ( AB.3 2.167), ( AB.4a 2.169), ( AB.6 2.171) and ( AB.11 2.175) that<br />
B h (e h ,ψ − Π h1 ψ) ≤ c 4 h µ |ψ| H 2 (Ω) |u| H µ (Ω), (2.176) AB.12<br />
{<br />
1/2<br />
where c 4 = c ˜C1/2 2 1 + C hC M<br />
C W<br />
(1 + C I )(1 + C A )}<br />
+<br />
2 ˜C(C A + CJ 2)1/2 .<br />
Finally, by ( 2.176), AB.12 ( 2.166) AB.2 and ( 2.162),<br />
A8.4<br />
exerAB1<br />
‖e h ‖ 2 L 2 (Ω) ≤ cc 4h µ |u| H µ (Ω)‖e h ‖ L 2 (Ω), (2.177) AB.13<br />
which already implies estimate ( 2.164). A8.20<br />
⊓⊔<br />
Exercise 2.34. Verify identity ( AB.1 2.165).<br />
Remark 2.35. In RWG01 [RWG01] the Neumann problem (i.e., ∂Ω = ∂Ω N ) was considered.<br />
The penalty coefficient σ was chosen according<br />
σ| Γ = C W<br />
h β , Γ ∈ F h , (2.178) A3.3a<br />
Γ<br />
insteand of ( 2.72), A3.3 where β ≥ 1/2 is a real number. If triangular grids do<br />
not contain any hanging node (i.e., T h are con<strong>for</strong>ming) then the optimal error<br />
estimation in the L 2 -norm of the NIPG method was proved provided that<br />
β ≥ 3 <strong>for</strong> d = 2 and β ≥ 3/2 <strong>for</strong> d = 3. In this case the interior penalty<br />
is so strong that DGFE methods behave likes the standard con<strong>for</strong>ming (i.e.,<br />
continuous) finite element schemes. For more details see [RWG01].<br />
RWG01<br />
sec:num_sc<br />
2.7 Numerical examples<br />
In this section, we shall justify the a priori error estimates ( 2.131), A4.1 ( 2.141) A4.32 and<br />
( 2.164). A8.20 In the first example, we assume that the exact solution is sufficiently<br />
regular. We show that the use of a higher degree of polynomial approximation<br />
increases the rate of convergence of the method. In the second example, the exact<br />
solution has a singularity. Then the order of convergence does not increase<br />
with the increasing degree of the used polynomial approximation. The computational<br />
results are in agreement with theory and show that the accuracy<br />
of the method is determined by the degree of the polynomial approximation<br />
as well the regularity of the solution.