

HW1_VT13 - KTH
HW1_VT13 - KTH
HW1_VT13 - KTH

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Page 2 of 6 Homework Assigment 1 EL2450<br />
Continuous control design<br />
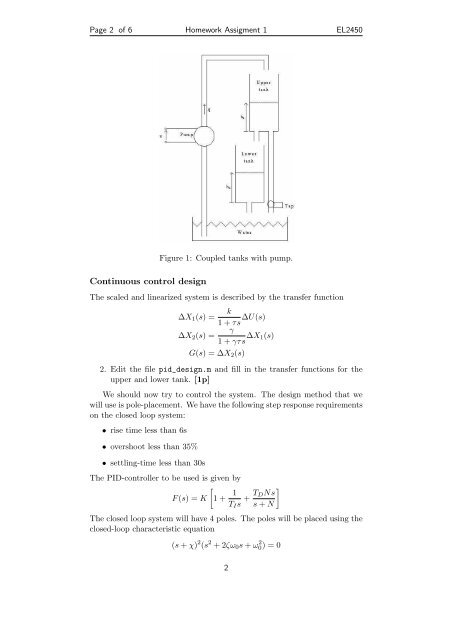
Figure 1: Coupled tanks with pump.<br />
The scaled and linearized system is described by the transfer function<br />
∆X 1 (s) =<br />
k<br />
1 + τs ∆U(s)<br />
γ<br />
∆X 2 (s) =<br />
1 + γτs ∆X 1(s)<br />
G(s) = ∆X 2 (s)<br />
2. Edit the file pid_design.m and fill in the transfer functions for the<br />
upper and lower tank. [1p]<br />
We should now try to control the system. The design method that we<br />
will use is pole-placement. We have the following step response requirements<br />
on the closed loop system:<br />
• rise time less than 6s<br />
• overshoot less than 35%<br />
• settling-time less than 30s<br />
The PID-controller to be used is given by<br />
[<br />
F (s) = K 1 + 1<br />
T I s + T ]<br />
DNs<br />
s + N<br />
The closed loop system will have 4 poles. The poles will be placed using the<br />
closed-loop characteristic equation<br />
(s + χ) 2 (s 2 + 2ζω 0 s + ω 2 0) = 0<br />
2














