

HW1_VT13 - KTH
HW1_VT13 - KTH
HW1_VT13 - KTH

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Page 4 of 6 Homework Assigment 1 EL2450<br />
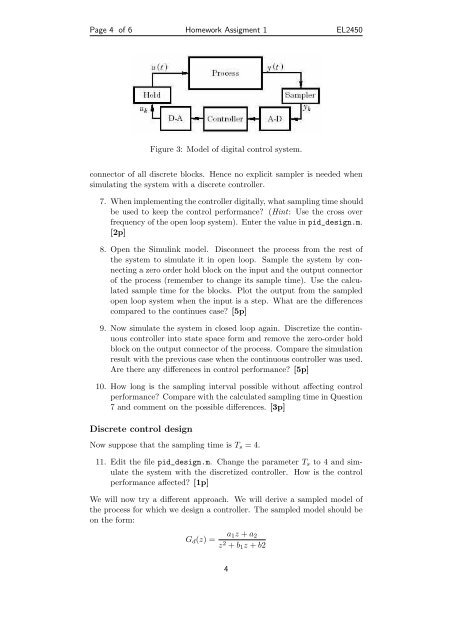
Figure 3: Model of digital control system.<br />
connector of all discrete blocks. Hence no explicit sampler is needed when<br />
simulating the system with a discrete controller.<br />
7. When implementing the controller digitally, what sampling time should<br />
be used to keep the control performance? (Hint: Use the cross over<br />
frequency of the open loop system). Enter the value in pid_design.m.<br />
[2p]<br />
8. Open the Simulink model. Disconnect the process from the rest of<br />
the system to simulate it in open loop. Sample the system by connecting<br />
a zero order hold block on the input and the output connector<br />
of the process (remember to change its sample time). Use the calculated<br />
sample time for the blocks. Plot the output from the sampled<br />
open loop system when the input is a step. What are the differences<br />
compared to the continues case? [5p]<br />
9. Now simulate the system in closed loop again. Discretize the continuous<br />
controller into state space form and remove the zero-order hold<br />
block on the output connector of the process. Compare the simulation<br />
result with the previous case when the continuous controller was used.<br />
Are there any differences in control performance? [5p]<br />
10. How long is the sampling interval possible without affecting control<br />
performance? Compare with the calculated sampling time in Question<br />
7 and comment on the possible differences. [3p]<br />
Discrete control design<br />
Now suppose that the sampling time is T s = 4.<br />
11. Edit the file pid_design.m. Change the parameter T s to 4 and simulate<br />
the system with the discretized controller. How is the control<br />
performance affected? [1p]<br />
We will now try a different approach. We will derive a sampled model of<br />
the process for which we design a controller. The sampled model should be<br />
on the form:<br />
G d (z) = a 1z + a 2<br />
z 2 + b 1 z + b2<br />
4














