AN937, Implementing a PID Controller Using a PIC18 MCU
AN937, Implementing a PID Controller Using a PIC18 MCU
AN937, Implementing a PID Controller Using a PIC18 MCU

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>AN937</strong><br />
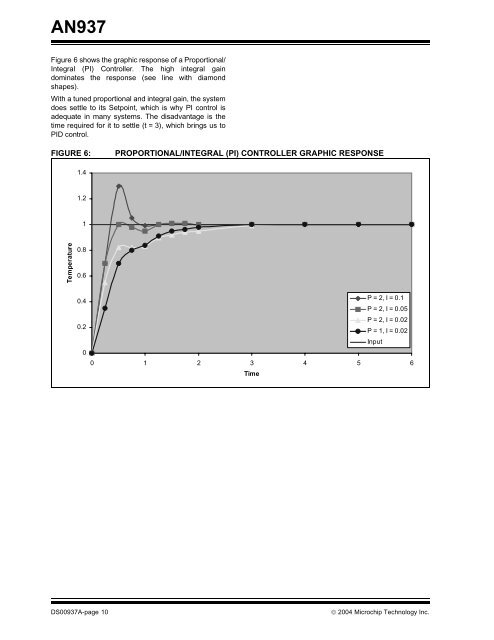
Figure 6 shows the graphic response of a Proportional/<br />
Integral (PI) <strong>Controller</strong>. The high integral gain<br />
dominates the response (see line with diamond<br />
shapes).<br />
With a tuned proportional and integral gain, the system<br />
does settle to its Setpoint, which is why PI control is<br />
adequate in many systems. The disadvantage is the<br />
time required for it to settle (t = 3), which brings us to<br />
<strong>PID</strong> control.<br />
FIGURE 6:<br />
PROPORTIONAL/INTEGRAL (PI) CONTROLLER GRAPHIC RESPONSE<br />
1.4<br />
1.2<br />
1<br />
Temperature<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
P = 2, I = 0.1<br />
P = 2, I = 0.05<br />
P = 2, I = 0.02<br />
P = 1, I = 0.02<br />
Input<br />
0 1 2 3 4 5 6<br />
Time<br />
DS00937A-page 10<br />
© 2004 Microchip Technology Inc.