Modeling and System-level Simulation of Force-balance MEMS ...
Modeling and System-level Simulation of Force-balance MEMS ...
Modeling and System-level Simulation of Force-balance MEMS ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Sensors & Transducers Journal, Vol. 127, Issue 4, April 2011, pp. 88-101<br />
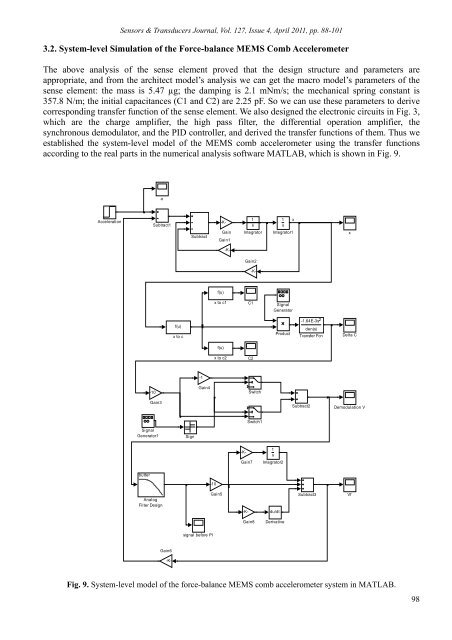
3.2. <strong>System</strong>-<strong>level</strong> <strong>Simulation</strong> <strong>of</strong> the <strong>Force</strong>-<strong>balance</strong> <strong>MEMS</strong> Comb Accelerometer<br />
The above analysis <strong>of</strong> the sense element proved that the design structure <strong>and</strong> parameters are<br />
appropriate, <strong>and</strong> from the architect model’s analysis we can get the macro model’s parameters <strong>of</strong> the<br />
sense element: the mass is 5.47 µg; the damping is 2.1 mNm/s; the mechanical spring constant is<br />
357.8 N/m; the initial capacitances (C1 <strong>and</strong> C2) are 2.25 pF. So we can use these parameters to derive<br />
corresponding transfer function <strong>of</strong> the sense element. We also designed the electronic circuits in Fig. 3,<br />
which are the charge amplifier, the high pass filter, the differential operation amplifier, the<br />
synchronous demodulator, <strong>and</strong> the PID controller, <strong>and</strong> derived the transfer functions <strong>of</strong> them. Thus we<br />
established the system-<strong>level</strong> model <strong>of</strong> the <strong>MEMS</strong> comb accelerometer using the transfer functions<br />
according to the real parts in the numerical analysis s<strong>of</strong>tware MATLAB, which is shown in Fig. 9.<br />
a<br />
Acceleration<br />
Subtract1<br />
Subtract<br />
-K-<br />
Gain<br />
Gain1<br />
1<br />
x'<br />
s<br />
Integrator<br />
1 x<br />
s<br />
Integrator1<br />
x<br />
-K-<br />
Gain2<br />
-K-<br />
f(u)<br />
x to c1<br />
C1<br />
Signal<br />
Generator<br />
f(u)<br />
x to c<br />
Product<br />
-1.64E-3s 2<br />
den(s)<br />
Transfer Fcn<br />
Delta C<br />
f(u)<br />
x to c2<br />
C2<br />
-10<br />
-1<br />
Gain4<br />
Switch<br />
Gain3<br />
Subtract2<br />
Demodulation V<br />
Switch1<br />
Signal<br />
Generator1<br />
Sign<br />
-K-<br />
Gain7<br />
1<br />
s<br />
Integrator2<br />
butter<br />
-10<br />
Analog<br />
Filter Design<br />
Gain5<br />
-K-<br />
du/dt<br />
Subtract3<br />
Vf<br />
Gain8<br />
Derivative<br />
signal before PI<br />
Gain6<br />
-K-<br />
Fig. 9. <strong>System</strong>-<strong>level</strong> model <strong>of</strong> the force-<strong>balance</strong> <strong>MEMS</strong> comb accelerometer system in MATLAB.<br />
98