Small-scale magnetorheological dampers for vibration mitigation ...
Small-scale magnetorheological dampers for vibration mitigation ...
Small-scale magnetorheological dampers for vibration mitigation ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Introduction<br />
Hysteretic models<br />
Identification methodology<br />
Future work<br />
New MR Dahl friction model<br />
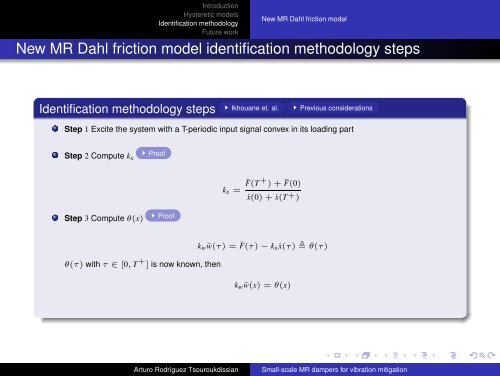
New MR Dahl friction model identification methodology steps<br />
Identification methodology steps<br />
Ikhouane et. al. Previous considerations<br />
Step 1 Excite the system with a T-periodic input signal convex in its loading part<br />
Step 2 Compute k x<br />
Proof<br />
¯F(T + ) + ¯F(0)<br />
k x =<br />
ẋ(0) + ẋ(T + )<br />
Step 3 Compute θ(x)<br />
Proof<br />
θ(τ) with τ ∈ [0, T + ] is now known, then<br />
k w¯w(τ) = ¯F(τ) − k xẋ(τ) θ(τ)<br />
k w¯w(x) = θ(x)<br />
Arturo Rodríguez Tsouroukdissian<br />
<strong>Small</strong>-<strong>scale</strong> MR <strong>dampers</strong> <strong>for</strong> <strong>vibration</strong> <strong>mitigation</strong>