Assign. #10 - Gene and Linda Voiland School of Chemical ...
Assign. #10 - Gene and Linda Voiland School of Chemical ...
Assign. #10 - Gene and Linda Voiland School of Chemical ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
BE 440/ChE 441<br />
Unified Systems Bioengineering II/<br />
Process Control<br />
Fall, 2009<br />
Washington State University<br />
Voil<strong>and</strong> <strong>School</strong> <strong>of</strong> <strong>Chemical</strong> Engineering <strong>and</strong><br />
Bioengineering<br />
Richard L. Zollars<br />
Homework <strong>Assign</strong>ment <strong>#10</strong><br />
Due: October 2, 2009<br />
You are working with a system described by the following transfer function<br />
G(<br />
s)<br />
<br />
K <br />
a<br />
s 1<br />
<br />
s 1<br />
s 1<br />
1 2<br />
<br />
where K = 1, τ 1 = 4 <strong>and</strong> τ 2 = 1. This system will be subjected to a unit step change at t = 0.<br />
Enter this transfer function in to Simulink <strong>and</strong> plot the response <strong>of</strong> the system for the<br />
following values <strong>of</strong> τ a : -4, -1, 1, 4, 8 <strong>and</strong> 16. (Plot the values out to t = 20). Using a partial<br />
fraction expansion determine equation representing the time domain response <strong>of</strong> this system<br />
for three values <strong>of</strong> τ a : τ a = -4, 1, <strong>and</strong> 8. In the time domain equation, what has changed in the<br />
equation for the various values <strong>of</strong> τ a ?<br />
SOLUTION<br />
The Simulink file used to generate the data for this problem is shown below<br />
Clock<br />
time<br />
To Workspace1<br />
Step<br />
-4s+1<br />
4s 2+5s+1<br />
Transfer Fcn<br />
Out<br />
To Workspace<br />
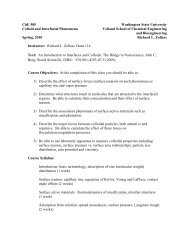
The plot <strong>of</strong> the results is shown on the following page. Substituting -4 for τ a into the transfer<br />
function <strong>and</strong> using a unit step function for the input gives the following expression for the<br />
output (Y(s))
3<br />
<strong>Assign</strong>ement <strong>#10</strong><br />
2.5<br />
2<br />
Taua = -4<br />
Taua = -1<br />
Taua = 1<br />
Taua = 4<br />
Taua = 8<br />
Taua = 16<br />
1.5<br />
Output<br />
1<br />
0.5<br />
0<br />
-0.5<br />
0 2 4 6 8 10 12 14 16 18 20<br />
Time<br />
Y ( s)<br />
<br />
s<br />
<br />
4 s 1<br />
4<br />
s 1s<br />
1<br />
<br />
1 <br />
<br />
s <br />
4 <br />
1 <br />
s s s<br />
1<br />
4 <br />
The form for a partial fraction expansion is<br />
Y ( s)<br />
<br />
1 <br />
<br />
s <br />
4 <br />
<br />
1 <br />
s s s<br />
1<br />
4 <br />
A<br />
s<br />
B<br />
<br />
1 <br />
s <br />
4 <br />
<br />
C<br />
s 1<br />
<br />
<br />
Multiply both sides by s <strong>and</strong> let s = 0 to get A = 1. Multiply both sides by (s + ¼) then let<br />
s = -1/4 to get B = -8/3. Finally multiply both sides by (s + 1) then let s = -1 to get C = 5/3.<br />
So for τ a = -4.0 the time domain response (y(t)) is<br />
t<br />
8 <br />
4<br />
( t)<br />
1 e<br />
y<br />
3<br />
5<br />
e<br />
3<br />
t
For τ a = 1 the LaPlace domain expression is<br />
Y ( s)<br />
<br />
s<br />
s<br />
1<br />
4<br />
s 1s<br />
1<br />
<br />
1<br />
<br />
4s<br />
s <br />
<br />
1 <br />
<br />
4 <br />
<br />
A B<br />
<br />
s 1 <br />
s <br />
4 <br />
Multiply by s <strong>and</strong> let s = 0 to get A = 1. Multiply by (s + ¼) <strong>and</strong> let s = -1/4 to get B = -1.<br />
This gives a time domain response <strong>of</strong><br />
y(<br />
t)<br />
1 e<br />
t<br />
<br />
4<br />
For τ a = 4 the LaPlace domain expression is<br />
Y ( s)<br />
<br />
s<br />
8s<br />
1<br />
4<br />
s 1s<br />
1<br />
<br />
<br />
8s<br />
1<br />
1 <br />
4s<br />
s s<br />
1<br />
4 <br />
<br />
<br />
A B<br />
<br />
s 1 <br />
s <br />
4 <br />
<br />
C<br />
s 1<br />
<br />
<br />
Multiply by s <strong>and</strong> let s = 0 to get A = 1. Multiply by (s + ¼) <strong>and</strong> let s = -1/4 to get B = 4/3.<br />
Multiply by (s + 1) <strong>and</strong> let s = -1 to get C = -7/3. This gives a time domain response <strong>of</strong><br />
t<br />
4 <br />
4<br />
( ) 1 <br />
y t<br />
e<br />
3<br />
<br />
7<br />
e<br />
3<br />
t<br />
There are two time dependent portions <strong>of</strong> all <strong>of</strong> the solutions; e -t/4 <strong>and</strong> e -t . Since the time<br />
constant for the first <strong>of</strong> these is 4 it is the slower <strong>of</strong> the two solutions. For τ a = -4 the<br />
coefficient on this slower term is larger in magnitude than the coefficient on the faster term.<br />
In addition the coefficient on the slower term is negative while that on the faster term is<br />
positive. Thus at small times, when both solutions influence the final result, the system<br />
response first goes in the wrong direction (lower for a positive step change). For τ a = 8 the<br />
situation is reversed with the coefficient on the slower solution being positive <strong>and</strong> small in<br />
magnitude. Thus at short times the faster solution plays a major role resulting in an<br />
overshoot. As the faster solution decays away the system response approaches the new<br />
steady-state from the side opposite the initial state. For τ a = 1 we get a cancellation between<br />
a term in the numerator <strong>and</strong> the denominator. As a result there is only one time dependent<br />
solution, he slower <strong>of</strong> the two responses in the other two cases. Thus the system response is<br />
a monotonic increase to the new steady-state.