Mechatronic Design of a Soccer Robot for the Small-Size League of ...
Mechatronic Design of a Soccer Robot for the Small-Size League of ...
Mechatronic Design of a Soccer Robot for the Small-Size League of ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
speed (m/s)<br />
Chapter 3: Kicking device<br />
<strong>the</strong> project, a more powerful motor should allow to reduce this time. The selected<br />
components will be used <strong>for</strong> testing purposes and to verify <strong>the</strong> ma<strong>the</strong>matical<br />
model.<br />
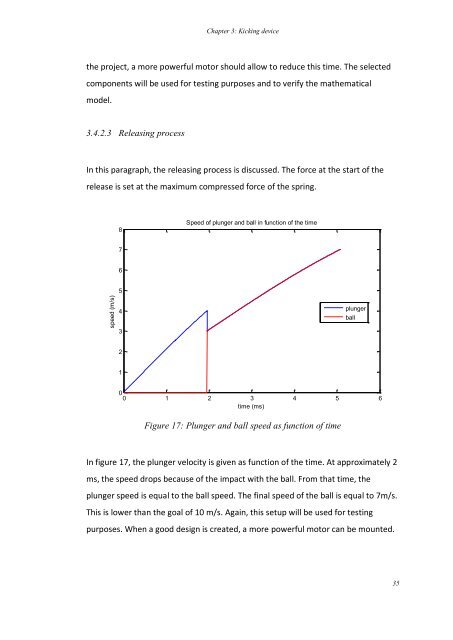
3.4.2.3 Releasing process<br />
In this paragraph, <strong>the</strong> releasing process is discussed. The <strong>for</strong>ce at <strong>the</strong> start <strong>of</strong> <strong>the</strong><br />
release is set at <strong>the</strong> maximum compressed <strong>for</strong>ce <strong>of</strong> <strong>the</strong> spring.<br />
8<br />
Speed <strong>of</strong> plunger and ball in function <strong>of</strong> <strong>the</strong> time<br />
7<br />
6<br />
5<br />
4<br />
plunger<br />
ball<br />
3<br />
2<br />
1<br />
0<br />
0 1 2 3 4 5 6<br />
time (ms)<br />
Figure 17: Plunger and ball speed as function <strong>of</strong> time<br />
In figure 17, <strong>the</strong> plunger velocity is given as function <strong>of</strong> <strong>the</strong> time. At approximately 2<br />
ms, <strong>the</strong> speed drops because <strong>of</strong> <strong>the</strong> impact with <strong>the</strong> ball. From that time, <strong>the</strong><br />
plunger speed is equal to <strong>the</strong> ball speed. The final speed <strong>of</strong> <strong>the</strong> ball is equal to 7m/s.<br />
This is lower than <strong>the</strong> goal <strong>of</strong> 10 m/s. Again, this setup will be used <strong>for</strong> testing<br />
purposes. When a good design is created, a more powerful motor can be mounted.<br />
35