CPP propeller - Towards high performance pitch control - Wärtsilä
CPP propeller - Towards high performance pitch control - Wärtsilä
CPP propeller - Towards high performance pitch control - Wärtsilä

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
WÄRTSILÄ TECHNICAL JOURNAL 01.2008<br />
<strong>Towards</strong> <strong>high</strong> <strong>performance</strong> <strong>pitch</strong> <strong>control</strong><br />
AUTHOR: Milinko Godjevac, Research Engineer, Wärtsilä in the Netherlands<br />
This article discusses a novel <strong>control</strong> strategy for a <strong>control</strong>lable <strong>pitch</strong> <strong>propeller</strong> (<strong>CPP</strong>) driven by a diesel engine.<br />
This new <strong>control</strong> strategy should contribute to more effective use of the complete power train.<br />
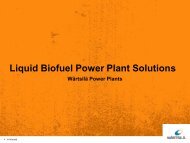
Fig. 1 – Dredger and its <strong>control</strong> system.<br />
Load<br />
<strong>control</strong><br />
Setpoint<br />
load<br />
prop. shaft torque<br />
Pitch<br />
<strong>control</strong><br />
Setpoint<br />
<strong>pitch</strong><br />
Mechanical load<br />
Setpoint<br />
speed<br />
Electrical load<br />
Electronical load sharing<br />
communication when<br />
running parallel<br />
Pitch<br />
feedback<br />
hydraulics<br />
Speed<br />
governor<br />
VIKING 25<br />
Propulsion gearbox<br />
OD<br />
box<br />
6.6 kV<br />
10MW<br />
Propulsion<br />
clutch<br />
Flywheel<br />
Wärtsilä<br />
12V46<br />
Main<br />
generator<br />
Fuel preservation is important for the future of mankind.<br />
Any increase in efficiency offers not only fuel savings,<br />
but also reduced engine emissions and more ecological<br />
solutions. For this reason, <strong>control</strong> strategies for developing<br />
<strong>high</strong>ly efficient propulsive thrust to a ship are important.<br />
The traditional ship with a <strong>CPP</strong>, driven by a diesel<br />
engine, is <strong>control</strong>led via the “combinator”, which sets<br />
the optimum combination of <strong>pitch</strong> and shaft rotational<br />
speed for stationary ship conditions at no waves and other<br />
added ship resistance conditions (“ideal” condition). The<br />
combinator consists of running up/down and look-up<br />
tables for the (pre-set) optimal <strong>pitch</strong> and rotational speed<br />
combination. The “optimum” is not only influenced<br />
by fuel consumption considerations, but also by the<br />
<strong>propeller</strong> noise and cavitation issues. In contrast to ideal<br />
conditions, at sea or maneuvering conditions necessitate<br />
the adjustment of shaft speed and/or <strong>pitch</strong>. In references<br />
[1] and [2] it was also shown that engine speed<br />
disturbances, caused by the seaway, could be suppressed<br />
better by <strong>pitch</strong> <strong>control</strong> than by <strong>control</strong>ling the fuel rack.<br />
The time needed to get the rotational shafting (diesel<br />
engine, gearbox and <strong>propeller</strong>) from one shaft-speed level<br />
to another is measured in the magnitude of a few seconds.<br />
For ships with large power take-offs using generators, the<br />
<strong>CPP</strong> <strong>pitch</strong> is used to compensate for fast and <strong>high</strong> frequent<br />
load changes of the generator, as well as for the seaway. For<br />
dredgers (see Figure 1), the generator is used to drive the<br />
dredge pump, which can jump in load from minimum to<br />
maximum and vice versa, rather quickly. The diesel engine<br />
load is kept constant by continuous and fast <strong>pitch</strong> changes.<br />
The existing situation<br />
Figure 2 shows the simplified <strong>CPP</strong> actuating system and<br />
<strong>pitch</strong> <strong>control</strong>. The oil volumes in the <strong>pitch</strong> actuating<br />
cylinder and the oil pipelines are <strong>control</strong>led by counter<br />
balancing valves. When no pressure exists at the ahead<br />
and astern ports of the oil-distribution box, these counter<br />
balancing valves (CBV) are closing. When these are closed,<br />
the <strong>propeller</strong> <strong>pitch</strong> stays as it is. These counter balance<br />
valves, together with the proportional valves with load<br />
sensing, make the task of the <strong>pitch</strong> <strong>control</strong>ler rather easy.<br />
But the cost is a rather slow actuating <strong>pitch</strong>, which can<br />
have different dead times from one <strong>pitch</strong> change to another.<br />
This has to be overcome in order to have fast and accurate<br />
<strong>pitch</strong> <strong>control</strong>.<br />
p<br />
in detail 49
[ MARINE / IN DETAIL ]<br />
[ MARINE / IN DETAIL ]<br />
Fig. 2 – Simplified <strong>CPP</strong> <strong>control</strong> system.<br />
p S<br />
, p C1<br />
, p C2<br />
(bar)<br />
Fig. 4 – Block diagram of the new pressure <strong>control</strong>ler.<br />
50 in detail<br />
feedback sensor<br />
header tank<br />
or pump<br />
xy<br />
U pv<br />
Valve<br />
drive<br />
Pitch<br />
Controller<br />
0 set<br />
Pitch setpoint<br />
OD-box<br />
Q C1<br />
, p C1<br />
p S<br />
, Q S<br />
CBV<br />
Q C2<br />
, p C2<br />
i 1<br />
i 2<br />
proportional<br />
valve<br />
p S<br />
, p C1<br />
, p C2<br />
, p H1<br />
(bar)<br />
p R<br />
, Q R<br />
<strong>pitch</strong> ahead<br />
p H<br />
hub<br />
load<br />
sensing<br />
setp.<br />
valve<br />
<strong>pitch</strong><br />
Fig. 3 – Modeled and measured results of <strong>CPP</strong> actuating model and <strong>pitch</strong> <strong>control</strong>.<br />
load-sensing <strong>control</strong><br />
pressure <strong>control</strong><br />
<strong>pitch</strong> position <strong>control</strong><br />
P v,max<br />
S<br />
(C|D)&E<br />
α act<br />
+<br />
C+<br />
S 2<br />
–<br />
S 1<br />
+<br />
–(C|D)<br />
N<br />
A|C<br />
4 + –<br />
u<br />
B|D S 5<br />
P ahead<br />
P astern<br />
ΔP is<br />
α ref<br />
C<br />
+<br />
–<br />
C ΔP_yoke<br />
C <strong>pitch</strong><br />
D C+δ D+δ<br />
C load sensing<br />
i prv<br />
p S<br />
p C1<br />
p C2<br />
p H1<br />
E<br />
(C|D)&E<br />
S 6<br />
+<br />
C main valve<br />
X m, ref –<br />
i valve<br />
–(C+δ/D+δ)<br />
X m, act<br />
main spool<br />
position <strong>control</strong><br />
The current situation for in-stationary<br />
maneuvering conditions and for increased<br />
vessel resistance in seaway, calls for a “load<br />
<strong>control</strong>” to be used. The traditional load<br />
<strong>control</strong> performs rather coarsely and is not<br />
able to precisely <strong>control</strong> the diesel engine<br />
load as a function of the actual shaft speed.<br />
This load <strong>control</strong> overrides the <strong>pitch</strong> set by<br />
the combinator, and reduces it in order to<br />
keep the diesel engine within its operating<br />
envelope. To avoid unnecessary <strong>pitch</strong><br />
changes in adverse weather, the passive<br />
load <strong>control</strong> is provided with an automatic<br />
adjusting dead zone. When <strong>pitch</strong><br />
fluctuations, caused by the passive load<br />
<strong>control</strong> action, are sensed and when these<br />
are periodic, the dead zone will be<br />
increased step by step until the periodic<br />
fluctuations have been removed. In heavy<br />
seaway, this results in an increased service<br />
margin and reduced average diesel engine<br />
loads of up to 60 or 70% of the CSR point.<br />
This passive load <strong>control</strong> automatically<br />
takes care of “good seamanship” needs,<br />
but it results in a lack of usage of the<br />
propulsion plant.<br />
As opposed to passive load <strong>control</strong>,<br />
active load <strong>control</strong> implies an active <strong>pitch</strong><br />
change in order to keep the load on the<br />
engine under <strong>control</strong>. This was investigated<br />
in [3] where the measurements were<br />
carried out on board a 9000 cargo tonner.<br />
These measurements indicate active load<br />
<strong>control</strong> as being ineffective and causing<br />
additional wear to the <strong>pitch</strong> adjusting<br />
system. However, looking at the spectrum<br />
analysis presented in the report [3], it can<br />
be clearly seen that the <strong>pitch</strong> adjusting<br />
system was three to four times slower<br />
than necessary to suppress torque<br />
oscillations. Thus these measurements and<br />
conclusions needed further investigation.<br />
In order to investigate if the load<br />
<strong>control</strong> could be used in the seaway, the<br />
<strong>CPP</strong> actuation and <strong>control</strong> system has<br />
been mathematically modelled [4].<br />
The model contains the following main<br />
elements:<br />
Pitch actuating mechanism.<br />
External <strong>pitch</strong> actuating force model<br />
(hydro-dynamic forces and moments).<br />
Hub mounted <strong>pitch</strong>-actuating cylinder.<br />
Oil supply lines and <strong>pitch</strong><br />
feedback pipes.<br />
Counter balance valve.<br />
Oil-distribution box.<br />
Hydraulic proportional valves,<br />
load sensing and pumps.<br />
Feedback sensors and <strong>pitch</strong><br />
closed loop <strong>control</strong>ler.
WÄRTSILÄ TECHNICAL JOURNAL 01.2008<br />
The study indicated that the response<br />
of the <strong>CPP</strong> system is slow, mainly because<br />
of the fact that oil has to be compressed<br />
prior to each <strong>pitch</strong> change. The oil must<br />
be compressed to the point that the hub<br />
pressure reaches the threshold level of the<br />
Coulomb friction. The dead time before<br />
<strong>pitch</strong> change can easily vary from 0.5<br />
seconds to 3.0 seconds. Figure 3<br />
shows modeled and measured results<br />
for the <strong>pitch</strong> change. The results show<br />
good correlation between the model<br />
and the actual response as measured.<br />
brake cylinder<br />
frame<br />
brake<br />
leakage valve<br />
mass actuator<br />
Schematical drawing of the test bench.<br />
load<br />
Pressure <strong>control</strong><br />
In the <strong>control</strong>lable <strong>pitch</strong> <strong>propeller</strong>, a<br />
counter balance valve is installed in the<br />
shaft line in order to maintain the <strong>pitch</strong><br />
should the hydraulics fail. In the new<br />
<strong>control</strong>ler, the counter balance valve is<br />
kept open whilst there is no change in<br />
<strong>pitch</strong>. This required the <strong>control</strong> strategy to<br />
be changed. Whilst there was no change<br />
in <strong>pitch</strong> position, the hydraulic pressure<br />
had to ensure that the <strong>pitch</strong> could not<br />
change, but as soon as a change of <strong>pitch</strong><br />
becomes necessary, the position <strong>control</strong><br />
actuates the yoke so that the desired <strong>pitch</strong><br />
is achieved. Then it is switched back to<br />
differential pressure <strong>control</strong> to maintain<br />
the <strong>pitch</strong>. Figure 4 shows the new <strong>control</strong><br />
strategy [5], which will be described below.<br />
When the <strong>pitch</strong> setpoint α ref<br />
changes,<br />
the <strong>pitch</strong> error increases so that condition<br />
C or D becomes true as soon as the <strong>pitch</strong><br />
error exceeds a certain value. Condition C<br />
indicates that the <strong>pitch</strong> error is negative,<br />
meaning that the <strong>pitch</strong> α act<br />
has to be<br />
decreased, while condition D indicates<br />
the opposite. Assuming that the <strong>pitch</strong><br />
has to be increased (condition D is true),<br />
the pressure <strong>control</strong>ler will increase the<br />
differential pressure in the hub-cylinder to<br />
the upper limit of the friction band. This<br />
is ensured by condition D switching S4 to<br />
set the upper part of the curve. In this way,<br />
the Coulomb friction band in the system is<br />
quickly crossed as pressure buildup is more<br />
efficient when carried out by a pressure<br />
<strong>control</strong>ler than by a position <strong>control</strong>ler.<br />
When the required differential pressure<br />
is set by the pressure <strong>control</strong>ler CΔ P_yoke<br />
with certain accuracy, condition E<br />
becomes true, so that S6 switches from<br />
pressure <strong>control</strong> to <strong>pitch</strong> position <strong>control</strong>.<br />
At the same time, S2 activates the<br />
electronic load-sensing to ensure a loadindependent<br />
yoke speed when the <strong>pitch</strong><br />
is changed, which is done by the <strong>pitch</strong><br />
Fig. 5 – Test bench set-up.<br />
position <strong>control</strong>ler C <strong>pitch</strong><br />
. The reference<br />
<strong>pitch</strong> is set δ more accurately than an<br />
error in the <strong>pitch</strong> is detected to prevent<br />
chattering and unwanted switching<br />
between the pressure and position <strong>control</strong>.<br />
When the required <strong>pitch</strong> is achieved,<br />
S6 switches back to pressure <strong>control</strong> and<br />
load sensing is turned off by S2. Now the<br />
pressure <strong>control</strong>ler sets the differential<br />
pressure needed to hold the <strong>pitch</strong>, given by<br />
the mean between the upper and the lower<br />
part of the exemplified curve of Figure 2.<br />
When the <strong>pitch</strong> set point changes, or<br />
when the pressure difference set to hold<br />
the <strong>pitch</strong> is not adequate due to changes in<br />
the seaway or weather leading to a change<br />
in <strong>pitch</strong>, the same procedure starts again to<br />
match the actual <strong>pitch</strong> with its set point.<br />
Note that the validity of Figure 2 can<br />
be extended by taking shaft speed N and<br />
ship speed through water u into account,<br />
as <strong>pitch</strong>, shaft speed, and ship speed<br />
define the thrust and the hydrodynamic<br />
forces acting on the blades, thus the <strong>pitch</strong><br />
actuating force. This extension would<br />
make the pressure <strong>control</strong>ler more reliable.<br />
In house tests<br />
In order to verify the model shown in<br />
Figure 4, a special test set-up has been<br />
constructed in Wärtsilä in the Netherlands.<br />
Figure 5 shows the test bench set-up.<br />
Results obtained from the workshop test<br />
bench indicate a better <strong>performance</strong> with<br />
the new <strong>control</strong> strategy and a reduction in<br />
dead time, Figure 6 shows the results from<br />
the new and old <strong>control</strong>lers. With the<br />
new <strong>control</strong>ler, it appears to be possible to<br />
follow seaway, because a sine as a <strong>pitch</strong> set<br />
point having a frequency of 0.1 Hz (wave<br />
encounter frequency) and an amplitude<br />
of 10% of the stroke, can be tracked.<br />
During the test bench measurements,<br />
it became clear that the non-linear<br />
differential pressure <strong>control</strong>ler is<br />
substantially faster than a linear differential<br />
pressure <strong>control</strong>ler. Furthermore, with<br />
the new <strong>control</strong> strategy switching<br />
between pressure and position <strong>control</strong>,<br />
the <strong>pitch</strong> can be set in a system with<br />
<strong>high</strong> Coulomb friction and a load<br />
force while no instability occurs. p<br />
in detail 51
[ MARINE / IN DETAIL ]<br />
[ MARINE / IN DETAIL ]<br />
position [%]<br />
position [%]<br />
Fig. 6 – Seaway simulation for a pressure (up) and position (bottom) <strong>control</strong>ler.<br />
power (%)<br />
10<br />
0<br />
–10<br />
10<br />
0<br />
–10<br />
5 10 15 20 25 30 35 40<br />
5 10 15 20 25 30 35 40<br />
100<br />
80<br />
60<br />
40<br />
20<br />
load limit<br />
load <strong>control</strong> curve<br />
f 1<br />
f 4<br />
f 5<br />
f 2<br />
f 3<br />
0 20 40 60 80 100<br />
rpm (%)<br />
a1<br />
a2<br />
a3<br />
a4<br />
a5<br />
old<br />
new<br />
V<br />
0.93V<br />
0.86V<br />
0.71V<br />
lines of specific<br />
fuel consumption<br />
(kg kW 1 h –1 )<br />
respect to the reliability of the mechanical<br />
system. The dynamics of the oil pipes<br />
and the response of the hydraulic system<br />
are shifting towards a resonant frequency.<br />
Friction in the system introduces<br />
non-linear effects and makes tuning of<br />
the <strong>control</strong>ler very difficult. Last but not<br />
least, tribology and reliability aspects<br />
of the bearings have to be considered.<br />
More active <strong>pitch</strong> <strong>control</strong> means more<br />
movement and would therefore result<br />
in <strong>high</strong>er wear. In [6] the big amplitude<br />
sliding has been reported as not being a<br />
problem for conventional use of a <strong>CPP</strong><br />
under designed conditions. However,<br />
this <strong>high</strong> <strong>control</strong> means more small<br />
amplitude and (relatively) <strong>high</strong> frequency<br />
sliding, which should be done in such<br />
a manner that fretting will not occur.<br />
On the other hand, the operation of<br />
a <strong>CPP</strong> in seaways is easily carried out<br />
in an improper manner causing <strong>control</strong><br />
movement due to a mismatch between<br />
the seaway and the actuator. From several<br />
references (vessels which are currently<br />
in operation) where a more active <strong>pitch</strong><br />
<strong>control</strong> has been used, the indication is<br />
that this has never led to increased wear<br />
problems. Also, the misuse of the <strong>CPP</strong> will<br />
lead to increased dynamic loads. Without<br />
improvements to the hydraulic system,<br />
the use of the <strong>CPP</strong> in seaways would be<br />
too slow to follow the wave and would<br />
lead to increased dynamic loads. For new<br />
ship systems where such a solution needs<br />
consideration, the consequence of the<br />
increased use should be studied as well.<br />
When done properly, it is expected that the<br />
new solution will contribute to fuel savings<br />
by a factor of several percentage points.<br />
Fig. 7 – Operating envelope of a propulsion plant.<br />
CONCLUSION<br />
There are two main applications that can<br />
benefit from the present work, but both<br />
have the same starting point. The work<br />
presented above is an attempt to make the<br />
<strong>pitch</strong> <strong>control</strong> faster and more dynamic,<br />
thereby giving a reduced service margin.<br />
The first application is for dredgers, where<br />
the reduced service margin results in<br />
more power for the dredging equipment,<br />
and quicker suppression of disturbances.<br />
The second application is for cargo ships<br />
52 in detail<br />
sailing in rough seas. Figure 7 shows the<br />
operating envelope of a propulsion plant,<br />
with the old <strong>control</strong> system propulsion<br />
plant operating in the red point. With the<br />
new <strong>control</strong> system, the service margin<br />
would be smaller and the operating point<br />
will go up. These effects result in <strong>high</strong>er<br />
speed and lower fuel consumption, a<br />
rough estimate of which is between 2 and<br />
5% of the specific fuel consumption.<br />
However, besides the benefits, there<br />
are several issues to be considered with<br />
REFERENCES:<br />
1. H T Grimmelius, D Stapersma, ‘Control<br />
optimisation and load prediction for<br />
marine diesel engines using a mean<br />
value simulation model’, ENSUS 2000,<br />
Newcastle-upon-Tyne (September 2000).<br />
2. H T Grimmelius, D Stapersma, ‘The impact<br />
of propulsion plant <strong>control</strong> on diesel engine<br />
thermal loading’, CIMAC Conference,<br />
Hamburg (May 2001).<br />
3. S. van der Steenhoven, ‘Monitoring 9000<br />
tonner’, Wärtsilä internal report,<br />
(September 2003).<br />
4. J. Bakker, A. Wesselink, ‘The use of nonlinear<br />
models in the analysis of <strong>CPP</strong><br />
actuator behavior’, WMTC Conference,<br />
London (March 2006).<br />
5. J.H.H. Huijbers, ‘Non-linear <strong>propeller</strong><br />
<strong>pitch</strong> <strong>control</strong>’, MSc thesis, TU Eindhoven,<br />
(December 2007).<br />
6. M. Godjevac, T. van Beek, H. Grimmelius,<br />
D. Stapersma, ‘Wear mechanism of a <strong>CPP</strong>’,<br />
WMTC Conference, London (March 2006).