Voice Controlled Motorized Wheelchair with Real Time Obstacle ...
Voice Controlled Motorized Wheelchair with Real Time Obstacle ...
Voice Controlled Motorized Wheelchair with Real Time Obstacle ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
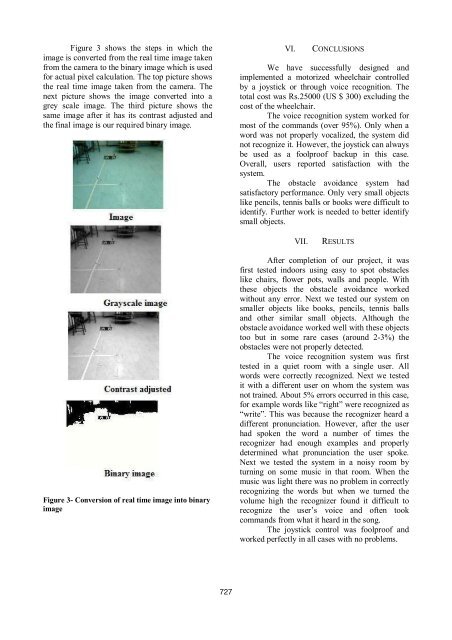
Figure 3 shows the steps in which the<br />
image is converted from the real time image taken<br />
from the camera to the binary image which is used<br />
for actual pixel calculation. The top picture shows<br />
the real time image taken from the camera. The<br />
next picture shows the image converted into a<br />
grey scale image. The third picture shows the<br />
same image after it has its contrast adjusted and<br />
the final image is our required binary image.<br />
Figure 3- Conversion of real time image into binary<br />
image<br />
727<br />
VI. CONCLUSIONS<br />
We have successfully designed and<br />
implemented a motorized wheelchair controlled<br />
by a joystick or through voice recognition. The<br />
total cost was Rs.25000 (US $ 300) excluding the<br />
cost of the wheelchair.<br />
The voice recognition system worked for<br />
most of the commands (over 95%). Only when a<br />
word was not properly vocalized, the system did<br />
not recognize it. However, the joystick can always<br />
be used as a foolproof backup in this case.<br />
Overall, users reported satisfaction <strong>with</strong> the<br />
system.<br />
The obstacle avoidance system had<br />
satisfactory performance. Only very small objects<br />
like pencils, tennis balls or books were difficult to<br />
identify. Further work is needed to better identify<br />
small objects.<br />
VII. RESULTS<br />
After completion of our project, it was<br />
first tested indoors using easy to spot obstacles<br />
like chairs, flower pots, walls and people. With<br />
these objects the obstacle avoidance worked<br />
<strong>with</strong>out any error. Next we tested our system on<br />
smaller objects like books, pencils, tennis balls<br />
and other similar small objects. Although the<br />
obstacle avoidance worked well <strong>with</strong> these objects<br />
too but in some rare cases (around 2-3%) the<br />
obstacles were not properly detected.<br />
The voice recognition system was first<br />
tested in a quiet room <strong>with</strong> a single user. All<br />
words were correctly recognized. Next we tested<br />
it <strong>with</strong> a different user on whom the system was<br />
not trained. About 5% errors occurred in this case,<br />
for example words like “right” were recognized as<br />
“write”. This was because the recognizer heard a<br />
different pronunciation. However, after the user<br />
had spoken the word a number of times the<br />
recognizer had enough examples and properly<br />
determined what pronunciation the user spoke.<br />
Next we tested the system in a noisy room by<br />
turning on some music in that room. When the<br />
music was light there was no problem in correctly<br />
recognizing the words but when we turned the<br />
volume high the recognizer found it difficult to<br />
recognize the user’s voice and often took<br />
commands from what it heard in the song.<br />
The joystick control was foolproof and<br />
worked perfectly in all cases <strong>with</strong> no problems.