A new type of tactile sensor detecting contact force and hardness of an
A new type of tactile sensor detecting contact force and hardness of an
A new type of tactile sensor detecting contact force and hardness of an

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
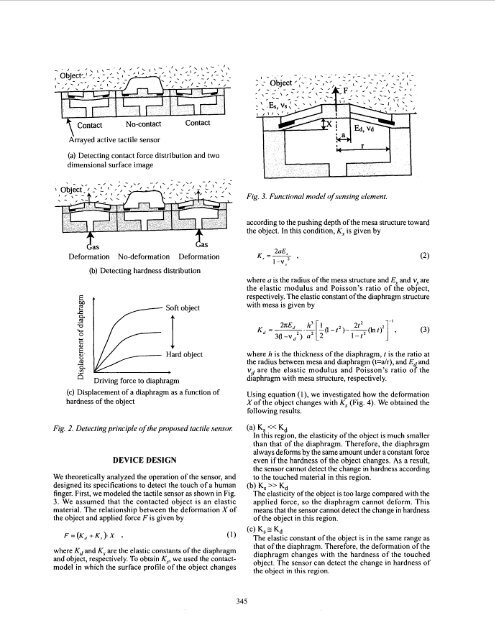
1 Contact No-<strong>contact</strong> Contact<br />
Arrayed active <strong>tactile</strong> <strong>sensor</strong><br />
(a) Detecting <strong>contact</strong> <strong>force</strong> distribution <strong><strong>an</strong>d</strong> two<br />
dimensional surface image<br />
Fig. 3. Functionul model <strong>of</strong> sensing element.<br />
&as<br />
Cas<br />
Deformation No-deformation Deformation<br />
(b) Detecting <strong>hardness</strong> distribution<br />
t<br />
S<strong>of</strong>t object<br />
according to the pushing depth <strong>of</strong> the mesa structure toward<br />
the object. In this condition, K, is given by<br />
2aE,<br />
K,=- ,<br />
I-y2<br />
where u is the radius <strong>of</strong> the mesa structure <strong><strong>an</strong>d</strong> E, <strong><strong>an</strong>d</strong> v, are<br />
the elastic modulus <strong><strong>an</strong>d</strong> Poisson's ratio <strong>of</strong> the object,<br />
respectively. The elastic const<strong>an</strong>t <strong>of</strong> the diaphragm structure<br />
with mesa is given by<br />
Driving <strong>force</strong> to diaphragm<br />
Hard object<br />
(c) Displacement <strong>of</strong> a diaphragm as a function <strong>of</strong><br />
<strong>hardness</strong> <strong>of</strong> the object<br />
Fig. 2. Detecting principle <strong>of</strong> the proposed <strong>tactile</strong> sensol:<br />
DEVICE DESIGN<br />
We theoretically <strong>an</strong>alyzed the operation <strong>of</strong> the <strong>sensor</strong>, <strong><strong>an</strong>d</strong><br />
designed its specifications to detect the touch <strong>of</strong> a hum<strong>an</strong><br />
finger. First, we modeled the <strong>tactile</strong> <strong>sensor</strong> as shown in Fig.<br />
3. We assumed that the <strong>contact</strong>ed object is <strong>an</strong> elastic<br />
material. The relationship between the deformation X <strong>of</strong><br />
the object <strong><strong>an</strong>d</strong> applied <strong>force</strong> F is given by<br />
F = (K,, + K,