Lecture 9: Controllability and Observability - Illinois Institute of ...
Lecture 9: Controllability and Observability - Illinois Institute of ...
Lecture 9: Controllability and Observability - Illinois Institute of ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
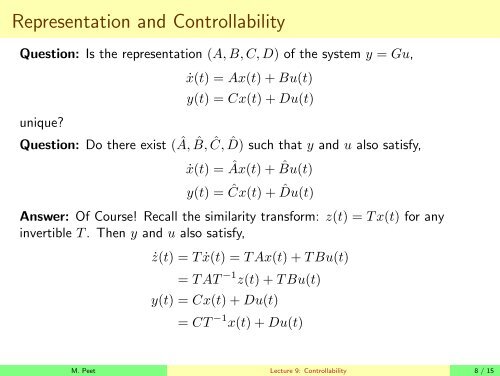
Representation <strong>and</strong> <strong>Controllability</strong><br />
Question: Is the representation (A, B, C, D) <strong>of</strong> the system y = Gu,<br />
unique<br />
ẋ(t) = Ax(t) + Bu(t)<br />
y(t) = Cx(t) + Du(t)<br />
Question: Do there exist (Â, ˆB, Ĉ, ˆD) such that y <strong>and</strong> u also satisfy,<br />
ẋ(t) = Âx(t) + ˆBu(t)<br />
y(t) = Ĉx(t) + ˆDu(t)<br />
Answer: Of Course! Recall the similarity transform: z(t) = T x(t) for any<br />
invertible T . Then y <strong>and</strong> u also satisfy,<br />
ż(t) = T ẋ(t) = T Ax(t) + T Bu(t)<br />
= T AT −1 z(t) + T Bu(t)<br />
y(t) = Cx(t) + Du(t)<br />
= CT −1 x(t) + Du(t)<br />
M. Peet <strong>Lecture</strong> 9: <strong>Controllability</strong> 8 / 15