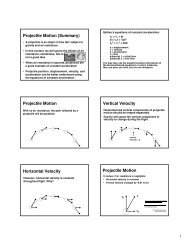
Anthropometrics ppt
Anthropometrics ppt
Anthropometrics ppt

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
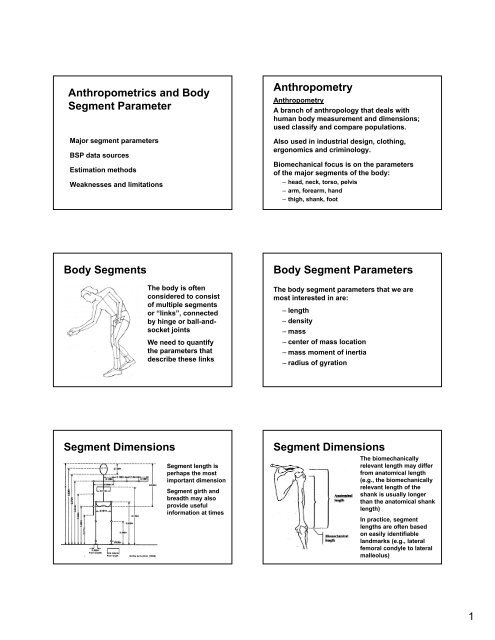
<strong>Anthropometrics</strong> and Body<br />
Segment Parameter<br />
Major segment parameters<br />
BSP data sources<br />
Estimation methods<br />
Weaknesses and limitations<br />
Anthropometry<br />
Anthropometry<br />
A branch of anthropology that deals with<br />
human body measurement and dimensions;<br />
used classify and compare populations.<br />
Also used in industrial design, clothing,<br />
ergonomics and criminology.<br />
Biomechanical focus is on the parameters<br />
of the major segments of the body:<br />
– head, neck, torso, pelvis<br />
– arm, forearm, hand<br />
– thigh, shank, foot<br />
Body Segments<br />
The body is often<br />
considered to consist<br />
of multiple segments<br />
or “links”, connected<br />
by hinge or ball-andsocket<br />
joints<br />
We need to quantify<br />
the parameters that<br />
describe these links<br />
Body Segment Parameters<br />
The body segment parameters that we are<br />
most interested in are:<br />
– length<br />
– density<br />
– mass<br />
– center of mass location<br />
– mass moment of inertia<br />
– radius of gyration<br />
Segment Dimensions<br />
Drillis & Contini (1966)<br />
Segment length is<br />
perhaps the most<br />
important dimension<br />
Segment girth and<br />
breadth may also<br />
provide useful<br />
information at times<br />
Segment Dimensions<br />
The biomechanically<br />
relevant length may differ<br />
from anatomical length<br />
(e.g., the biomechanically<br />
relevant length of the<br />
shank is usually longer<br />
than the anatomical shank<br />
length)<br />
In practice, segment<br />
lengths are often based<br />
on easily identifiable<br />
landmarks (e.g., lateral<br />
femoral condyle to lateral<br />
malleolus)<br />
1
Segment Lengths, How<br />
The Relationship Between Limb-length<br />
Inequality and Able-bodied Gait Asymmetry<br />
1.0<br />
Knee Angle<br />
Asymmetry Coefficient<br />
0.5<br />
A: r = -0.29, p = 0.155<br />
1.0<br />
1.0 2.0<br />
Knee Power<br />
Asymmetry Coefficient<br />
0.5<br />
0.0<br />
B: r = -0.51, p = 0.008<br />
0.0 1.0 2.0<br />
Limb Length Inequality (cm)<br />
Segment Density<br />
• Segments are made up of various tissues<br />
(bone, muscle, fat, skin, etc) that have<br />
different densities<br />
• Individual body segments do not all have the<br />
same density: distal segments have a higher<br />
density than proximal segments<br />
Densities: bone 1,150 – 1,350 kg/m 3<br />
muscle 1,040 – 1,060 kg/m 3<br />
adipose (fat) 950 – 990 kg/m 3<br />
limb segments 1050 − 1200 kg/m 3<br />
• A quantitative indicator of a<br />
segment’s inertia<br />
• Mass can be determined via<br />
a typical scale<br />
• Tables also exist that allow one to predict<br />
segment masses, usually as a percentage<br />
of whole body mass<br />
whole body 1000 − 1050 kg/m 3 Segment Mass<br />
Segment Volume<br />
• Volume of different tissues (fat,<br />
muscle, bone) can also be<br />
determined using modern<br />
imaging/scanning techniques<br />
(MRI, CT, DEXA)<br />
• These volumes can be<br />
combined with more accurate<br />
individual tissue densities to<br />
yield good estimates of<br />
segment mass<br />
One way to<br />
determine volume<br />
Segment Center of Mass<br />
• Body segments are made up of an immense<br />
number of distributed mass particles<br />
• Mechanical analysis is facilitated by<br />
identifying the center of mass: a single point<br />
about which the mass is equally distributed<br />
(i.e., the balance point)<br />
• Typically specified as a distance (% of<br />
segment length) relative to some unique<br />
point (e.g. proximal joint center)<br />
2
Segment Center of Mass,<br />
How<br />
• Typically specified as a distance (% of<br />
segment length) relative to some unique<br />
point (e.g. proximal joint center)<br />
• Can be better understood d by balancing the<br />
segment on a knife edge<br />
• Can also be quantified using a couple of<br />
different mathematical methods…<br />
Segment Center of Mass<br />
The CM of an object can be determined using a<br />
“reaction board” or “moment table”<br />
CM is found by knowing that all moments about<br />
the knife edge must sum to zero<br />
should be at<br />
knife edge<br />
Segment Center of Mass<br />
The location of the center of mass of a segment<br />
can be defined as follows:<br />
x 1<br />
m 1 m 2 m 3<br />
x 2<br />
Body Center of Mass<br />
If you know the locations of<br />
the CMs for individual body<br />
segments, the whole body<br />
CM can be calculated for any<br />
m 1 (x 1 ,y 1 )<br />
posture (see “Calculating<br />
M (x 0 ,y 0 )<br />
Whole-body Center of Mass” in<br />
Part II on class website) m 2 (x 2 ,y 2 )<br />
x 3<br />
X<br />
M<br />
x 0 = m 1 x 1 + m 2 x 2 + m 3 x 3<br />
M<br />
m 3 (x 3 ,y 3 )<br />
M X = Σ m i x i so X = Σ m i x i<br />
M<br />
y 0 = m 1 y 1 + m 2 y 2 + m 3 y 3<br />
M with M = m 1 + m 2 + m 3<br />
Center of Mass,<br />
Why Care<br />
Center of Mass/Gravity<br />
What is the difference CM and center of<br />
gravity are not the same, but for human<br />
body segments the difference is negligable<br />
Stability…other<br />
th<br />
performancerelated<br />
factors are<br />
related to the<br />
location of the CM<br />
Nigg & Herzog (1999)<br />
3
Mass Moment of Inertia<br />
Mass Moment of Inertia<br />
• Where mass is a quantitative indicator of a<br />
segment’s linear inertia, moment of inertia<br />
indicates a segment’s rotational inertia<br />
• Depends on mass and mass distribution<br />
m 3<br />
r 3<br />
I AXIS = Σm i r i<br />
2<br />
(units: kg⋅m 2 )<br />
axis<br />
r 1<br />
m 1 m 2<br />
r 2<br />
I AXIS = m 1 r 12 + m 2 r 22 + m 3 r 32 + .... + m n r n<br />
2<br />
For a three dimensional<br />
object there will be 3<br />
moments of inertia,<br />
typically expressed<br />
about the 3 principle<br />
i axes of the segment<br />
For human limb<br />
segments, I X and I Z will<br />
be similar, I Y will be<br />
much smaller<br />
Z SEG<br />
X SEG<br />
Y SEG<br />
Determining Moment of Inertia<br />
Moment of inertia is the sum of the products of all<br />
the mass elements of an object and the square of<br />
the distances of the mass elements from the axis<br />
of rotation:<br />
I AXIS = Σm i r i<br />
2<br />
axis<br />
r 1<br />
m 1 m 2<br />
r 2<br />
I AXIS = m 1 r 12 + m 2 r 22 + m 3 r 32 + .... + m n r n<br />
2<br />
Radius of Gyration<br />
A more practical approach:<br />
I AXIS = (m SEG )(k 2 ), so k = √ I AXIS / m SEG<br />
where “k” is an experimentally determined<br />
d<br />
length known as the Radius of Gyration, that<br />
applies to the whole segment at once<br />
–k is not the same as the distance to segmental CM<br />
–magnitude of k is different for different axes of<br />
rotation<br />
Radius of Gyration<br />
Interpretation<br />
• Radius of gyration is the distance a particle<br />
with the same mass as the segment would<br />
need to be from the axis of rotation to have<br />
the same moment of inertia as the segment<br />
• Radius of gyration is really just a convenient<br />
way of “packaging” mass moment of inertia<br />
information<br />
• In anthropometric data sets, k is often<br />
expressed relative to segment length<br />
BSP Studies/Data<br />
Moment of inertia of cadaver<br />
segments can be determined<br />
from the period of oscillation<br />
A “torsional pendulum”<br />
is used to determine<br />
moment of inertia about<br />
the segment long axis<br />
4
Parallel Axis Theorem<br />
• Moment of inertia values are commonly<br />
specified relative to an axis through the<br />
segment center of mass<br />
• The moment of inertia about a different axis<br />
(e.g., through h the proximal joint) can be<br />
determined using the parallel axis theorem<br />
I A = I CM + md 2<br />
Where I A is moment of inertia about the new axis, I CM is<br />
moment of inertia about an axis through the CM, m is<br />
segment mass, and d is distance between the two axes<br />
Parallel Axis Theorem<br />
A prosthetic lower leg has a mass of 3 kg and<br />
a center of mass 20 cm from the knee joint.<br />
The radius of gyration is 14.1 cm. What is the<br />
moment of inertia about the knee joint (I( KNEE )<br />
I CM = mk 2<br />
I CM = (3 kg)(0.141 m) 2 = 0.06 kg⋅m 2<br />
I KNEE = I CM + md 2<br />
I KNEE = 0.06 kg⋅m 2 + (3 kg)(0.2 m) 2 = 0.1796 kg⋅m 2<br />
Parallel Axis Theorem<br />
The combined moment of inertia<br />
of several segments about a<br />
remote axis can be calculated by<br />
using the parallel axis theorem,<br />
and summing across segments<br />
I LEG(HIP) = I T(HIP) + I S(HIP) + I F(HIP)<br />
where:<br />
I T(HIP) = I T(CM) + m T d<br />
2<br />
T<br />
I S(HIP) = I S(CM) + m S d S<br />
2<br />
I F(HIP) = I F(CM) + m F d F<br />
2<br />
Hip<br />
d F<br />
d T<br />
d S<br />
m F<br />
m T<br />
m S<br />
BSP Assumptions<br />
During the period of data collection:<br />
• The segments are perfectly rigid<br />
• The segments are connect by frictionless<br />
hinge or ball-and-socket and joints<br />
• The length of each segment remains constant<br />
• The CM location of each segment remains<br />
constant<br />
• The mass moment of inertia of each segment<br />
remains constant<br />
BSP Studies/Data<br />
Harless (1860)<br />
– One of the earliest quantitative study of BSPs<br />
– Dissected 2 cadavers, determining segment mass<br />
and 3D CM location with scales and a balance<br />
plate; he later studied 7 cadavers<br />
Braun & Fischer (1889)<br />
– Determined mass, volume, and CM in 3 cadavers<br />
using scales and thin rods<br />
– Also estimated BSPs, based on height and mass<br />
– Divided body into 14 segments<br />
– Used data from individual segments to determine<br />
CM of whole body during locomotion<br />
BSP Studies/Data<br />
Dempster (1955)<br />
– Did most detailed and extensive dissection to<br />
date in 8 cadavers specimens<br />
– Determined mass, CM location, & moment of<br />
inertia values for all major body segments<br />
– Expressed data as proportion of total body mass,<br />
and relative to segment lengths<br />
– Results have been used extensively in<br />
biomechanics research<br />
– Data were from only 8 cadavers, who were older<br />
(52-83 yrs) Caucasian males, most of whom were<br />
reported to be emaciated<br />
5
BSP Studies/Data<br />
Hanavan (1964)<br />
– Used simple geometric shapes<br />
to model 15 major segments<br />
– Assumed uniform density within<br />
each segment<br />
– Used anthropometric data from<br />
the subject to personalize BSP<br />
estimates (still up to 10% error)<br />
BSP Studies/Data<br />
Hatze (1975)<br />
– More advanced model; included 17, irregularly<br />
shaped segments<br />
– Can be used with live subjects<br />
Zatsiorsky & Seluyanov (1983)<br />
– Use a gamma-ray scanner to estimate segment<br />
mass, CM, and moment of inertia<br />
– Used 100 male Caucasian adults<br />
– Developed regression equation to predict BSPs<br />
– Used as the current standard by many (appropriate)<br />
BSPs Summary<br />
Issues and Shortcomings:<br />
• Prior to 1970’s fewer than 50 cadavers had<br />
been studied<br />
• Most were adult, Caucasian males<br />
• Data on other populations (women, children,<br />
different ethnic groups) are scant<br />
• Can cadaver data safely be applied to living<br />
humans<br />
• Techniques on living subjects often suffer<br />
from difficulty in validating results<br />
BSPs Summary<br />
• BSPs arguably represent the greatest source<br />
of error in biomechanical analyses (errors<br />
can easily be ±10%, or sometimes greater)<br />
• The influence of these errors depends<br />
greatly on the nature of the movement being<br />
studied (magnitude of the accelerations)<br />
• Several investigators have used techniques<br />
like CT, MRI, DEXA to get more accurate,<br />
personalized BSP estimates<br />
– This is still far from being routine (cost & time)<br />
I wish to acknowledge these individuals for<br />
major contributions to the preceding slides<br />
• Brian Umberger, PhD<br />
• Iain Hunter, PhD<br />
6