Serviceability limit state - Eurocodes
Serviceability limit state - Eurocodes
Serviceability limit state - Eurocodes

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
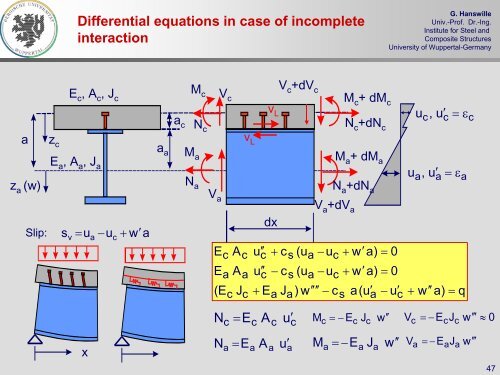
Differential equations in case of incomplete<br />
interaction<br />
G. Hanswille<br />
Univ.-Prof. Dr.-Ing.<br />
Institute for Steel and<br />
Composite Structures<br />
University of Wuppertal-Germany<br />
a<br />
z a<br />
(w)<br />
E c<br />
, A c<br />
, J c<br />
v L<br />
a c N c<br />
z c<br />
v L<br />
a a<br />
E a<br />
, A a<br />
, J a<br />
M c<br />
M a<br />
N a<br />
V a<br />
V c<br />
V c<br />
+dV c<br />
M c<br />
+ dM c<br />
N c<br />
+dN c<br />
M a<br />
+ dM a<br />
N a<br />
+dN a<br />
u<br />
u<br />
,<br />
′<br />
c u c<br />
,<br />
′<br />
a u a<br />
= ε<br />
= ε<br />
a<br />
c<br />
Slip:<br />
sv = ua<br />
−uc<br />
+ w′<br />
a<br />
x<br />
Ec<br />
Ac<br />
Ea<br />
Aa<br />
(Ec<br />
Jc<br />
c<br />
V a<br />
+dV a<br />
dx<br />
u′′<br />
c + cs<br />
(ua<br />
−uc<br />
+ w′<br />
a) = 0<br />
u′′<br />
c − cs<br />
(ua<br />
−uc<br />
+ w′<br />
a) = 0<br />
+ Ea<br />
Ja<br />
) w′′′′<br />
− cs<br />
a(u′<br />
a − u′<br />
c + w′′<br />
a) = q<br />
N = E A u′<br />
a<br />
c<br />
a<br />
c<br />
N = E A u′<br />
a<br />
a<br />
c<br />
Mc = − Ec<br />
Jc<br />
w ′′<br />
Ma = −Ea<br />
Ja<br />
w ′′<br />
V<br />
c<br />
= −E<br />
c<br />
J<br />
c<br />
Va = −EaJa<br />
w′′<br />
′<br />
w′′′<br />
≈ 0<br />
47