

Stability Analysis of an All-Electric Ship MVDC Power Distribution ...
Stability Analysis of an All-Electric Ship MVDC Power Distribution ...
Stability Analysis of an All-Electric Ship MVDC Power Distribution ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
î in<br />
ˆ =0 i load<br />
100<br />
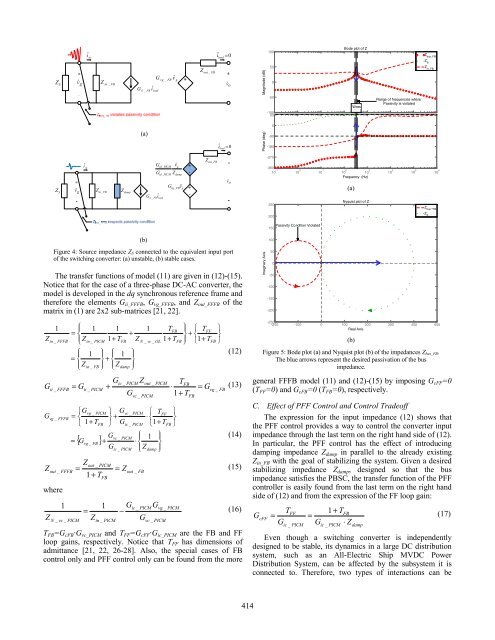
Bode plot <strong>of</strong> Z<br />
Z bus_FB<br />
Z S<br />
Z S<br />
vˆg<br />
vg _ FB g<br />
Z<br />
in _ FB<br />
G<br />
ii _ FB<br />
iˆ<br />
G<br />
load<br />
vˆ<br />
Z<br />
out<br />
_<br />
FB<br />
vˆo<br />
Magnitude (dB)<br />
50<br />
0<br />
-50<br />
-100<br />
90<br />
Wres<br />
R<strong>an</strong>ge <strong>of</strong> frequencies where<br />
Passivity is violated<br />
Z in_FB<br />
(a)<br />
ˆ =0 i load<br />
Phase (deg)<br />
0<br />
-90<br />
-180<br />
Z S<br />
vˆg<br />
î in<br />
Z<br />
in _ FB<br />
Z damp<br />
G<br />
ii<br />
_<br />
FB<br />
G<br />
G<br />
iˆ<br />
vd_<br />
PICM<br />
id_<br />
PICM<br />
load<br />
G<br />
vˆ<br />
Z<br />
vg_<br />
g<br />
damp<br />
FB<br />
vˆ<br />
g<br />
Z<br />
out _ FB<br />
vˆo<br />
-270<br />
-360<br />
10 -1 10 0 10 1 10 2 10 3 10 4 10 5 10 6<br />
250<br />
Frequency (Hz)<br />
(a)<br />
Nyquist plot <strong>of</strong> Z<br />
Z bus _ FB<br />
200<br />
Z S<br />
Passivity Condition Violated<br />
150<br />
(b)<br />
Figure 4: Source imped<strong>an</strong>ce Z S connected to the equivalent input port<br />
<strong>of</strong> the switching converter: (a) unstable, (b) stable cases.<br />
The tr<strong>an</strong>sfer functions <strong>of</strong> model (11) are given in (12)-(15).<br />
Notice that for the case <strong>of</strong> a three-phase DC-AC converter, the<br />
model is developed in the dq synchronous reference frame <strong>an</strong>d<br />
therefore the elements G ii_FFFB , G vg_FFFB , <strong>an</strong>d Z out_FFFB <strong>of</strong> the<br />
matrix in (1) are 2x2 sub-matrices [21, 22].<br />
Z<br />
G<br />
G<br />
Z<br />
1<br />
in _ FFFB<br />
⎪⎧<br />
1<br />
= ⎨<br />
⎪⎩ Zin<br />
_<br />
⎪⎧<br />
1<br />
= ⎨<br />
⎪⎩ Zin<br />
_<br />
PICM<br />
FB<br />
1<br />
1+<br />
T<br />
FB<br />
⎪⎫<br />
⎪⎧<br />
1<br />
⎬ + ⎨<br />
⎪⎭ ⎪⎩ Z<br />
G<br />
damp<br />
+<br />
Z<br />
⎪⎫<br />
⎬<br />
⎪⎭<br />
1<br />
N _ vc _ OL<br />
Z<br />
TFB<br />
1+<br />
T<br />
FB<br />
⎪⎫<br />
⎧ TFF<br />
⎬ + ⎨<br />
⎪⎭ ⎩1+<br />
T<br />
FB<br />
⎫<br />
⎬<br />
⎭<br />
(12)<br />
ic _ PICM out _ PICM FB<br />
ii _ FFFB<br />
= Gii<br />
_ PICM<br />
+<br />
⋅ = G (13)<br />
vg _ FB<br />
Gvc<br />
_ PICM<br />
1+<br />
TFB<br />
vg _ FFFB<br />
⎧Gvg<br />
_<br />
= ⎨<br />
⎩ 1+<br />
T<br />
=<br />
{ G }<br />
vg _ FB<br />
Z<br />
PICM<br />
FB<br />
⎫<br />
⎬ +<br />
⎭<br />
G<br />
+<br />
G<br />
G<br />
G<br />
vc _ PICM<br />
ic _ PICM<br />
⎧ TFF<br />
⋅ ⎨<br />
⎩1+<br />
T<br />
⎪⎧<br />
1 ⎪⎫<br />
⋅ ⎨ ⎬<br />
⎪⎩ Zdamp<br />
⎪⎭<br />
vc _ PICM<br />
ic _ PICM<br />
FB<br />
⎫<br />
⎬<br />
⎭<br />
T<br />
(14)<br />
out _ PICM<br />
out _ FFFB<br />
= = Z<br />
(15)<br />
out _ FB<br />
1+<br />
TFB<br />
where<br />
Z<br />
1<br />
1<br />
G<br />
ic _ PICM vg _ PICM<br />
= −<br />
(16)<br />
N _ vc _ PICM<br />
Zin<br />
_ PICM<br />
Gvc<br />
_ PICM<br />
T FB =G cFB·G vc_PICM <strong>an</strong>d T FF =G cFF·G ic_PICM are the FB <strong>an</strong>d FF<br />
loop gains, respectively. Notice that T FF has dimensions <strong>of</strong><br />
admitt<strong>an</strong>ce [21, 22, 26-28]. Also, the special cases <strong>of</strong> FB<br />
control only <strong>an</strong>d PFF control only c<strong>an</strong> be found from the more<br />
G<br />
Imaginary Axis<br />
100<br />
50<br />
0<br />
-50<br />
-100<br />
-150<br />
-200<br />
-250<br />
-200 -100 0 100 200 300 400 500<br />
Real Axis<br />
(b)<br />
Figure 5: Bode plot (a) <strong>an</strong>d Nyquist plot (b) <strong>of</strong> the imped<strong>an</strong>ces Z bus_FB.<br />
The blue arrows represent the desired passivation <strong>of</strong> the bus<br />
imped<strong>an</strong>ce.<br />
general FFFB model (11) <strong>an</strong>d (12)-(15) by imposing G cFF =0<br />
(T FF =0) <strong>an</strong>d G cFB =0 (T FB =0), respectively.<br />
C. Effect <strong>of</strong> PFF Control <strong>an</strong>d Control Trade<strong>of</strong>f<br />
The expression for the input imped<strong>an</strong>ce (12) shows that<br />
the PFF control provides a way to control the converter input<br />
imped<strong>an</strong>ce through the last term on the right h<strong>an</strong>d side <strong>of</strong> (12).<br />
In particular, the PFF control has the effect <strong>of</strong> introducing<br />
damping imped<strong>an</strong>ce Z damp in parallel to the already existing<br />
Z in_FB with the goal <strong>of</strong> stabilizing the system. Given a desired<br />
stabilizing imped<strong>an</strong>ce Z damp , designed so that the bus<br />
imped<strong>an</strong>ce satisfies the PBSC, the tr<strong>an</strong>sfer function <strong>of</strong> the PFF<br />
controller is easily found from the last term on the right h<strong>an</strong>d<br />
side <strong>of</strong> (12) <strong>an</strong>d from the expression <strong>of</strong> the FF loop gain:<br />
G<br />
cFF<br />
T<br />
=<br />
G<br />
FF<br />
ic _ PICM<br />
=<br />
G<br />
1 + TFB<br />
(17)<br />
ic _ PICM<br />
⋅ Z<br />
damp<br />
Even though a switching converter is independently<br />
designed to be stable, its dynamics in a large DC distribution<br />
system, such as <strong>an</strong> <strong>All</strong>-<strong>Electric</strong> <strong>Ship</strong> <strong>MVDC</strong> <strong>Power</strong><br />
<strong>Distribution</strong> System, c<strong>an</strong> be affected by the subsystem it is<br />
connected to. Therefore, two types <strong>of</strong> interactions c<strong>an</strong> be<br />
414













