

Stability Analysis of an All-Electric Ship MVDC Power Distribution ...
Stability Analysis of an All-Electric Ship MVDC Power Distribution ...
Stability Analysis of an All-Electric Ship MVDC Power Distribution ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Stability</strong> <strong>Analysis</strong> <strong>of</strong> <strong>an</strong> <strong>All</strong>-<strong>Electric</strong> <strong>Ship</strong><br />
<strong>MVDC</strong> <strong>Power</strong> <strong>Distribution</strong> System<br />
Using a Novel Passivity-Based <strong>Stability</strong> Criterion<br />
Antonino Riccobono, Enrico S<strong>an</strong>ti<br />
Dept. <strong>of</strong> <strong>Electric</strong>al Engineering<br />
University <strong>of</strong> South Carolina<br />
Columbia, SC 29208, USA<br />
riccobon@cec.sc.edu, s<strong>an</strong>ti@cec.sc.edu<br />
Abstract—The present paper describes a recently proposed<br />
Passivity-Based <strong>Stability</strong> Criterion (PBSC) <strong>an</strong>d demonstrates its<br />
usefulness <strong>an</strong>d applicability to the stability <strong>an</strong>alysis <strong>of</strong> the<br />
<strong>MVDC</strong> <strong>Power</strong> <strong>Distribution</strong> System for the <strong>All</strong>-<strong>Electric</strong> <strong>Ship</strong>. The<br />
criterion is based on imposing passivity <strong>of</strong> the overall DC bus<br />
imped<strong>an</strong>ce. If passivity <strong>of</strong> the bus imped<strong>an</strong>ce is ensured, stability<br />
is guar<strong>an</strong>teed as well. The PBSC, in contrast with existing<br />
stability criteria, such as the Middlebrook criterion <strong>an</strong>d its<br />
extensions, which are based on the minor loop gain concept, i.e.<br />
<strong>an</strong> imped<strong>an</strong>ce ratio at a given interface, <strong>of</strong>fers several<br />
adv<strong>an</strong>tages: reduction <strong>of</strong> artificial design conservativeness,<br />
insensitivity to component grouping, applicability to multiconverter<br />
systems <strong>an</strong>d to systems in which the power flow<br />
direction ch<strong>an</strong>ges, for example as a result <strong>of</strong> system<br />
reconfiguration. Moreover, the criterion c<strong>an</strong> be used in<br />
conjunction with <strong>an</strong> active method to improve system stability,<br />
called the Positive Feed-Forward (PFF) control, for the design <strong>of</strong><br />
virtual damping networks. By designing the virtual imped<strong>an</strong>ce<br />
so that the bus imped<strong>an</strong>ce passivity condition is met, the<br />
approach results in greatly improved stability <strong>an</strong>d damping <strong>of</strong><br />
tr<strong>an</strong>sients on the DC bus voltage. Simulation validation is<br />
performed using a switching-model DC power distribution<br />
system.<br />
I. INTRODUCTION<br />
Recently, there has been <strong>an</strong> increased interest in using<br />
<strong>MVDC</strong> <strong>Power</strong> <strong>Distribution</strong> for the US Navy <strong>All</strong>-<strong>Electric</strong> <strong>Ship</strong><br />
[1-3] <strong>an</strong>d a new IEEE St<strong>an</strong>dard has been released [4]. The<br />
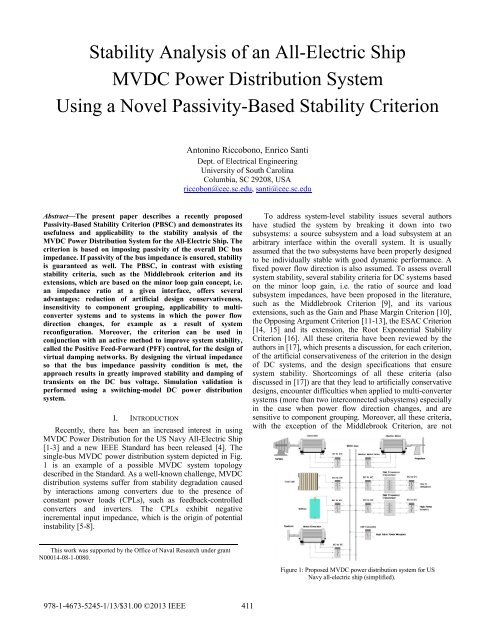
single-bus <strong>MVDC</strong> power distribution system depicted in Fig.<br />
1 is <strong>an</strong> example <strong>of</strong> a possible <strong>MVDC</strong> system topology<br />
described in the St<strong>an</strong>dard. As a well-known challenge, <strong>MVDC</strong><br />
distribution systems suffer from stability degradation caused<br />
by interactions among converters due to the presence <strong>of</strong><br />
const<strong>an</strong>t power loads (CPLs), such as feedback-controlled<br />
converters <strong>an</strong>d inverters. The CPLs exhibit negative<br />
incremental input imped<strong>an</strong>ce, which is the origin <strong>of</strong> potential<br />
instability [5-8].<br />
To address system-level stability issues several authors<br />
have studied the system by breaking it down into two<br />
subsystems: a source subsystem <strong>an</strong>d a load subsystem at <strong>an</strong><br />
arbitrary interface within the overall system. It is usually<br />
assumed that the two subsystems have been properly designed<br />
to be individually stable with good dynamic perform<strong>an</strong>ce. A<br />
fixed power flow direction is also assumed. To assess overall<br />
system stability, several stability criteria for DC systems based<br />
on the minor loop gain, i.e. the ratio <strong>of</strong> source <strong>an</strong>d load<br />
subsystem imped<strong>an</strong>ces, have been proposed in the literature,<br />
such as the Middlebrook Criterion [9], <strong>an</strong>d its various<br />
extensions, such as the Gain <strong>an</strong>d Phase Margin Criterion [10],<br />
the Opposing Argument Criterion [11-13], the ESAC Criterion<br />
[14, 15] <strong>an</strong>d its extension, the Root Exponential <strong>Stability</strong><br />
Criterion [16]. <strong>All</strong> these criteria have been reviewed by the<br />
authors in [17], which presents a discussion, for each criterion,<br />
<strong>of</strong> the artificial conservativeness <strong>of</strong> the criterion in the design<br />
<strong>of</strong> DC systems, <strong>an</strong>d the design specifications that ensure<br />
system stability. Shortcomings <strong>of</strong> all these criteria (also<br />
discussed in [17]) are that they lead to artificially conservative<br />
designs, encounter difficulties when applied to multi-converter<br />
systems (more th<strong>an</strong> two interconnected subsystems) especially<br />
in the case when power flow direction ch<strong>an</strong>ges, <strong>an</strong>d are<br />
sensitive to component grouping. Moreover, all these criteria,<br />
with the exception <strong>of</strong> the Middlebrook Criterion, are not<br />
This work was supported by the Office <strong>of</strong> Naval Research under gr<strong>an</strong>t<br />
N00014-08-1-0080.<br />
Figure 1: Proposed <strong>MVDC</strong> power distribution system for US<br />
Navy all-electric ship (simplified).<br />
978-1-4673-5245-1/13/$31.00 ©2013 IEEE 411
conducive to <strong>an</strong> easy design formulation. Another signific<strong>an</strong>t<br />
practical difficulty present with all the prior stability criteria is<br />
the minor loop gain online measurement [18]. It requires two<br />
separate measurements, source subsystem output imped<strong>an</strong>ce<br />
<strong>an</strong>d load subsystem input imped<strong>an</strong>ce, <strong>an</strong>d then some postprocessing.<br />
Due to the complexity in the calculation, this<br />
approach is not suitable for online stability monitoring. (Only<br />
in the work [19], a practical approach to measure the stability<br />
margins <strong>of</strong> the minor loop gain was proposed. However, such<br />
<strong>an</strong> approach, based on the Opposing Argument Criterion, fails<br />
when used with other less conservative criteria.)<br />
To tackle all these difficulties, a novel Passivity-Based<br />
<strong>Stability</strong> Criterion (PBSC) has been recently proposed [20].<br />
The method is based on the passivity <strong>of</strong> the overall DC bus<br />
imped<strong>an</strong>ce rather th<strong>an</strong> on the Nyquist Criterion applied to <strong>an</strong><br />
imped<strong>an</strong>ce ratio. If the bus imped<strong>an</strong>ce is passive, the stability<br />
<strong>of</strong> the system is guar<strong>an</strong>teed. In the present paper, the<br />
usefulness <strong>an</strong>d applicability <strong>of</strong> the PBSC to the stability<br />
<strong>an</strong>alysis <strong>of</strong> the <strong>MVDC</strong> <strong>Power</strong> <strong>Distribution</strong> System for the <strong>All</strong>-<br />
<strong>Electric</strong> <strong>Ship</strong> is demonstrated using a me<strong>an</strong>ingful, somewhat<br />
simpler test system. Moreover, the PBSC c<strong>an</strong> be coupled with<br />
a recently proposed control strategy for switching converters<br />
called Positive Feed-Forward (PFF) control [21, 22], to design<br />
virtual damping imped<strong>an</strong>ces able to “passivate” <strong>an</strong>d, therefore,<br />
stabilize the DC bus.<br />
The digital network <strong>an</strong>alyzer technique [23] is the tool<br />
adopted in the present paper to perform nonparametric<br />
measurement <strong>of</strong> the bus imped<strong>an</strong>ce. From this measurement,<br />
online bus imped<strong>an</strong>ce passivity condition <strong>an</strong>d therefore system<br />
stability c<strong>an</strong> be monitored. This technique uses a switching<br />
converter to perturb the bus, which has a pseudo-r<strong>an</strong>dom<br />
binary sequence (PRBS) signal in addition to the duty cycle<br />
signal coming from its feedback controller. Since the PRBS is<br />
<strong>an</strong> approximation <strong>of</strong> white noise, all frequencies <strong>of</strong> interest<br />
c<strong>an</strong> be excited simult<strong>an</strong>eously. The perturbation at the bus<br />
interface is measured <strong>an</strong>d the cross-correlation technique is<br />
applied to construct the bus imped<strong>an</strong>ce <strong>of</strong> the system. Online<br />
measurement <strong>of</strong> the bus imped<strong>an</strong>ce c<strong>an</strong> be used for system<br />
health monitoring, fault detection <strong>an</strong>d localization, stability<br />
<strong>an</strong>d perform<strong>an</strong>ce monitoring, stability improvement using<br />
adaptive control, <strong>an</strong>d for distributed control.<br />
II. THE PASSIVITY-BASED STABILITY CRITERION<br />
To better underst<strong>an</strong>d the main difference between the<br />
PBSC <strong>an</strong>d all previous criteria, one c<strong>an</strong> examine Fig. 2. The<br />
single-bus DC power distribution system in Fig. 2a consists <strong>of</strong><br />
n source converters <strong>an</strong>d m load converters connected to the<br />
bus, a generalization <strong>of</strong> the <strong>MVDC</strong> power distribution system<br />
for <strong>All</strong>-<strong>Electric</strong> <strong>Ship</strong>s depicted in Fig. 1. By looking at the bus<br />
port, the given system c<strong>an</strong> be reduced to <strong>an</strong> equivalent<br />
interacting source subsystem <strong>an</strong>d load subsystem network<br />
(Fig. 2b) <strong>an</strong>d then to <strong>an</strong> equivalent 1-port network (Fig. 2c).<br />
While all previous criteria have stopped at the step shown in<br />
Fig. 2b, the proposed PBSC combines together the two<br />
subsystems. The resulting 1-port network shown in Fig. 2c<br />
seen from the DC bus port has <strong>an</strong> imped<strong>an</strong>ce<br />
Z bus (s)=V bus (s)/I inj (s), where I inj (s) is <strong>an</strong> injection current from<br />
<strong>an</strong> external bus-connected device used to perturb the bus. This<br />
imped<strong>an</strong>ce is clearly the parallel combination <strong>of</strong> all the<br />
Figure 2: (a) Typical <strong>MVDC</strong> power distribution system for <strong>Ship</strong>s<br />
with n+m converters, (b) equivalent interacting source subsystem <strong>an</strong>d<br />
load subsystem network, <strong>an</strong>d (c) equivalent 1-port network.<br />
converters’ input/output imped<strong>an</strong>ces, i.e.<br />
Z bus =Z S //Z in =Z 1 //...//Z n //Z n+1 //…//Z n+m . The resulting network is<br />
passive if <strong>an</strong>d only if:<br />
1) Z bus (s) has no right half pl<strong>an</strong>e (RHP) poles, <strong>an</strong>d<br />
2) Re{Z bus (jω)}≥0, ∀ ω .<br />
Condition 1) requires that the Nyquist contour <strong>of</strong> Z bus (jω)<br />
c<strong>an</strong>not enclose <strong>an</strong>y poles. Condition 2) is equivalent to<br />
-90°≤arg[Z bus (jω)]≤90°, <strong>an</strong>d corresponds to <strong>an</strong> imped<strong>an</strong>ce<br />
having positive real part at all frequencies. This also implies<br />
that the Nyquist contour <strong>of</strong> Z bus (jω) must lie wholly on the<br />
RHP.<br />
A passive network has the property <strong>of</strong> being stable [24].<br />
Therefore, the proposed Passivity-Based <strong>Stability</strong> Criterion<br />
(PBSC) for switching converter DC distribution systems (Fig.<br />
2a) states that:<br />
If the passivity condition (<strong>an</strong>d therefore the phase constraint)<br />
is satisfied for Z bus (s), then the overall system consisting <strong>of</strong> the<br />
parallel combination <strong>of</strong> all the converters’ input/output<br />
imped<strong>an</strong>ces (or equivalently <strong>of</strong> the two interacting<br />
subsystems) is stable.<br />
The PBSC has several adv<strong>an</strong>tages over the minor-loopgain-based<br />
stability criteria:<br />
• It c<strong>an</strong> easily h<strong>an</strong>dle multiple interconnected converters<br />
<strong>an</strong>d inversion <strong>of</strong> power flow direction because what<br />
matters is only the parallel combination <strong>of</strong> all input/output<br />
imped<strong>an</strong>ces. Notice that for this reason, the PBSC is also<br />
insensitive to component grouping – typically a problem<br />
for the more conservative prior criteria.<br />
• It reduces artificial design conservativeness typical <strong>of</strong> all<br />
prior stability criteria because the LHP <strong>of</strong> the Nyquist plot<br />
<strong>of</strong> Z bus (jω) is the “forbidden region”. One does not need to<br />
consider encirclements <strong>of</strong> the (-1,0) point.<br />
• Unlike the minor loop gain online measurement, the bus<br />
imped<strong>an</strong>ce online measurement is easy to implement,<br />
does not require complex post-processing, <strong>an</strong>d is suitable<br />
for system stability monitoring.<br />
• The criterion lends itself to the design <strong>of</strong> virtual damping<br />
imped<strong>an</strong>ces which c<strong>an</strong> be actively introduced in parallel<br />
at the bus load-side by a recently proposed control<br />
strategy for switching converters called Positive Feed-<br />
412
Forward (PFF) control. The PFF controller is designed<br />
based on imposing passivity <strong>of</strong> the overall DC bus<br />
imped<strong>an</strong>ce to provide a control design method that<br />
ensures system stability <strong>an</strong>d perform<strong>an</strong>ce.<br />
T<br />
T<br />
I<br />
Gi<br />
L c _ PICM<br />
= 1 +<br />
where T I =G cI·G iLd_OL .<br />
I<br />
(10)<br />
III. THE CONCEPT OF POSITIVE FEED-FORWARD CONTROL<br />
To underst<strong>an</strong>d the concept <strong>of</strong> PFF control, a complete<br />
small-signal model <strong>of</strong> a PFF-<strong>an</strong>d-FB-controlled switching<br />
converter using g-parameter representation [25] is given. The<br />
converter has <strong>an</strong> inner PI current loop <strong>an</strong>d two outer loops<br />
represented by a PI voltage control <strong>an</strong>d a PFF control as<br />
shown in Fig. 3. First, the open-loop PI current mode (PICM)<br />
model is given, <strong>an</strong>d then the closed-loop, both feed-forward<br />
<strong>an</strong>d feedback (FFFB), is derived. After the model is given, the<br />
role <strong>of</strong> PFF control in the passivation, <strong>an</strong>d therefore<br />
stabilization, <strong>of</strong> a <strong>MVDC</strong> bus system is described.<br />
The small-signal model <strong>of</strong> the open-loop converter under<br />
duty cycle control (OL subscript) based on g-parameter<br />
representation c<strong>an</strong> be found in [26-28] for the case <strong>of</strong> DC-DC<br />
converters <strong>an</strong>d in [21, 22] for the case <strong>of</strong> a three-phase DC-AC<br />
converter.<br />
A. Open-loop model<br />
The small-signal open-loop (G cFB (s)=0 <strong>an</strong>d G cFF (s)=0)<br />
PICM converter model is the following<br />
⎡<br />
⎡iˆ<br />
⎤<br />
in ⎢<br />
⎢ ⎥ Z<br />
vˆ<br />
= ⎢<br />
⎢ ⎥ ⎢G<br />
⎢⎣<br />
iˆ<br />
⎥<br />
L ⎦ ⎢<br />
⎣Gi<br />
in<br />
vg<br />
Lg<br />
1<br />
⎤<br />
Gii<br />
_ PICM<br />
Gic<br />
_ PICM ⎥⎡<br />
vˆ<br />
g ⎤<br />
_ PICM<br />
⎥⎢<br />
⎥<br />
−<br />
⎥⎢<br />
iˆ<br />
(1)<br />
load<br />
_ PICM<br />
Zout<br />
_ PICM<br />
Gvc<br />
_ PICM ⎥<br />
⎥⎢⎣<br />
iˆ<br />
⎥<br />
c ⎦<br />
_ PICM<br />
Gi<br />
i PICM<br />
G<br />
L _<br />
iLc<br />
_ PICM ⎦<br />
The tr<strong>an</strong>sfer functions for (1) are given in (2)-(10)<br />
Z<br />
G<br />
G<br />
G<br />
Z<br />
G<br />
G<br />
G<br />
1<br />
in _ PICM<br />
ii _ PICM<br />
ic _ PICM<br />
vg _ PICM<br />
out _ PICM<br />
vc _ PICM<br />
1<br />
=<br />
Z<br />
= G<br />
G<br />
=<br />
G<br />
= G<br />
in _ OL<br />
ii _ OL<br />
G<br />
−<br />
id _ OL<br />
G<br />
G<br />
Gid<br />
_ OLG<br />
−<br />
G<br />
G<br />
−<br />
iL<br />
g _ OL<br />
iL<br />
d _ OL<br />
iLd<br />
_ OL<br />
iLi<br />
_ OL<br />
G<br />
TI<br />
1+<br />
T<br />
TI<br />
1+<br />
T<br />
id _ OL id _ OL iL<br />
g _ OL I<br />
i d OL<br />
G<br />
L _<br />
iL<br />
d _ OL<br />
1+<br />
vg _ OL<br />
1<br />
=<br />
Z<br />
G<br />
=<br />
G<br />
in _ OL<br />
iL<br />
g<br />
iL g _ PICM<br />
+<br />
G<br />
−<br />
G<br />
+<br />
vd _ OL I<br />
iL d _ OL<br />
1+<br />
G<br />
_<br />
= 1 T<br />
G<br />
_<br />
= 1 T<br />
iLi<br />
iL i _ PICM<br />
+<br />
I<br />
OL<br />
I<br />
OL<br />
vd _ OL<br />
G<br />
vd _ OL<br />
T<br />
T<br />
G<br />
I<br />
G<br />
iL<br />
d _ OL<br />
iL<br />
g _ OL<br />
G<br />
iL<br />
d _ OL<br />
iLi<br />
_ OL<br />
I<br />
I<br />
T<br />
T<br />
TI<br />
1+<br />
T<br />
I<br />
TI<br />
1+<br />
T<br />
I<br />
I<br />
(2)<br />
(3)<br />
(4)<br />
(5)<br />
(6)<br />
(7)<br />
(8)<br />
(9)<br />
B. Closed-loop model<br />
The closed-loop FFFB converter model (11) is obtained<br />
from the open-loop PICM converter model (1) by imposing a<br />
control current iˆ<br />
= iˆ<br />
−iˆ<br />
= G ⋅ vˆ<br />
− G ⋅ vˆ<br />
vˆgs<br />
c<br />
vˆg<br />
î load<br />
G cI<br />
î<br />
c<br />
î FF<br />
G CFF<br />
+<br />
î in<br />
dˆ<br />
vˆg<br />
+<br />
‐<br />
FF<br />
î FB<br />
FB<br />
⎡ 1<br />
⎤<br />
⎡iˆ<br />
⎤ ⎢<br />
G<br />
in<br />
ii _ FFFB ⎥⎡<br />
vˆ<br />
⎤<br />
⎢ ⎥ = Z<br />
g<br />
⎢ in _ FFFB<br />
⎥⎢<br />
⎥<br />
(11)<br />
⎣ vˆ<br />
⎦ ⎢<br />
⎥⎣<br />
iˆ<br />
load ⎦<br />
⎣<br />
Gvg<br />
_ FFFB − Zout<br />
_ FFFB ⎦<br />
î FF<br />
î<br />
c<br />
dˆ<br />
(a)<br />
î FB<br />
î<br />
L<br />
vˆo<br />
î load<br />
1<br />
î<br />
+ in<br />
Z<br />
_<br />
( s)<br />
+<br />
in OL +<br />
G<br />
_<br />
( s)<br />
+ vˆ<br />
vg OL -<br />
+<br />
+<br />
G iL g _ OL<br />
( s)<br />
î L<br />
+<br />
+<br />
G ii _ OL<br />
( s)<br />
Z out _ OL<br />
( s)<br />
G iL i _ OL<br />
( s)<br />
G id _ OL<br />
( s)<br />
G vd _ OL<br />
( s)<br />
G iL<br />
( s)<br />
G cFB<br />
d _ OL<br />
Converter<br />
T I<br />
‐ PICM Converter<br />
(b)<br />
Figure 3: Switching converter with inner PI current loop, outer voltage<br />
loop, <strong>an</strong>d PFF control: (a) circuital representation, <strong>an</strong>d (b) small-signal<br />
block diagram representation.<br />
cFF<br />
g<br />
cFB<br />
T FB<br />
413
î in<br />
ˆ =0 i load<br />
100<br />
Bode plot <strong>of</strong> Z<br />
Z bus_FB<br />
Z S<br />
Z S<br />
vˆg<br />
vg _ FB g<br />
Z<br />
in _ FB<br />
G<br />
ii _ FB<br />
iˆ<br />
G<br />
load<br />
vˆ<br />
Z<br />
out<br />
_<br />
FB<br />
vˆo<br />
Magnitude (dB)<br />
50<br />
0<br />
-50<br />
-100<br />
90<br />
Wres<br />
R<strong>an</strong>ge <strong>of</strong> frequencies where<br />
Passivity is violated<br />
Z in_FB<br />
(a)<br />
ˆ =0 i load<br />
Phase (deg)<br />
0<br />
-90<br />
-180<br />
Z S<br />
vˆg<br />
î in<br />
Z<br />
in _ FB<br />
Z damp<br />
G<br />
ii<br />
_<br />
FB<br />
G<br />
G<br />
iˆ<br />
vd_<br />
PICM<br />
id_<br />
PICM<br />
load<br />
G<br />
vˆ<br />
Z<br />
vg_<br />
g<br />
damp<br />
FB<br />
vˆ<br />
g<br />
Z<br />
out _ FB<br />
vˆo<br />
-270<br />
-360<br />
10 -1 10 0 10 1 10 2 10 3 10 4 10 5 10 6<br />
250<br />
Frequency (Hz)<br />
(a)<br />
Nyquist plot <strong>of</strong> Z<br />
Z bus _ FB<br />
200<br />
Z S<br />
Passivity Condition Violated<br />
150<br />
(b)<br />
Figure 4: Source imped<strong>an</strong>ce Z S connected to the equivalent input port<br />
<strong>of</strong> the switching converter: (a) unstable, (b) stable cases.<br />
The tr<strong>an</strong>sfer functions <strong>of</strong> model (11) are given in (12)-(15).<br />
Notice that for the case <strong>of</strong> a three-phase DC-AC converter, the<br />
model is developed in the dq synchronous reference frame <strong>an</strong>d<br />
therefore the elements G ii_FFFB , G vg_FFFB , <strong>an</strong>d Z out_FFFB <strong>of</strong> the<br />
matrix in (1) are 2x2 sub-matrices [21, 22].<br />
Z<br />
G<br />
G<br />
Z<br />
1<br />
in _ FFFB<br />
⎪⎧<br />
1<br />
= ⎨<br />
⎪⎩ Zin<br />
_<br />
⎪⎧<br />
1<br />
= ⎨<br />
⎪⎩ Zin<br />
_<br />
PICM<br />
FB<br />
1<br />
1+<br />
T<br />
FB<br />
⎪⎫<br />
⎪⎧<br />
1<br />
⎬ + ⎨<br />
⎪⎭ ⎪⎩ Z<br />
G<br />
damp<br />
+<br />
Z<br />
⎪⎫<br />
⎬<br />
⎪⎭<br />
1<br />
N _ vc _ OL<br />
Z<br />
TFB<br />
1+<br />
T<br />
FB<br />
⎪⎫<br />
⎧ TFF<br />
⎬ + ⎨<br />
⎪⎭ ⎩1+<br />
T<br />
FB<br />
⎫<br />
⎬<br />
⎭<br />
(12)<br />
ic _ PICM out _ PICM FB<br />
ii _ FFFB<br />
= Gii<br />
_ PICM<br />
+<br />
⋅ = G (13)<br />
vg _ FB<br />
Gvc<br />
_ PICM<br />
1+<br />
TFB<br />
vg _ FFFB<br />
⎧Gvg<br />
_<br />
= ⎨<br />
⎩ 1+<br />
T<br />
=<br />
{ G }<br />
vg _ FB<br />
Z<br />
PICM<br />
FB<br />
⎫<br />
⎬ +<br />
⎭<br />
G<br />
+<br />
G<br />
G<br />
G<br />
vc _ PICM<br />
ic _ PICM<br />
⎧ TFF<br />
⋅ ⎨<br />
⎩1+<br />
T<br />
⎪⎧<br />
1 ⎪⎫<br />
⋅ ⎨ ⎬<br />
⎪⎩ Zdamp<br />
⎪⎭<br />
vc _ PICM<br />
ic _ PICM<br />
FB<br />
⎫<br />
⎬<br />
⎭<br />
T<br />
(14)<br />
out _ PICM<br />
out _ FFFB<br />
= = Z<br />
(15)<br />
out _ FB<br />
1+<br />
TFB<br />
where<br />
Z<br />
1<br />
1<br />
G<br />
ic _ PICM vg _ PICM<br />
= −<br />
(16)<br />
N _ vc _ PICM<br />
Zin<br />
_ PICM<br />
Gvc<br />
_ PICM<br />
T FB =G cFB·G vc_PICM <strong>an</strong>d T FF =G cFF·G ic_PICM are the FB <strong>an</strong>d FF<br />
loop gains, respectively. Notice that T FF has dimensions <strong>of</strong><br />
admitt<strong>an</strong>ce [21, 22, 26-28]. Also, the special cases <strong>of</strong> FB<br />
control only <strong>an</strong>d PFF control only c<strong>an</strong> be found from the more<br />
G<br />
Imaginary Axis<br />
100<br />
50<br />
0<br />
-50<br />
-100<br />
-150<br />
-200<br />
-250<br />
-200 -100 0 100 200 300 400 500<br />
Real Axis<br />
(b)<br />
Figure 5: Bode plot (a) <strong>an</strong>d Nyquist plot (b) <strong>of</strong> the imped<strong>an</strong>ces Z bus_FB.<br />
The blue arrows represent the desired passivation <strong>of</strong> the bus<br />
imped<strong>an</strong>ce.<br />
general FFFB model (11) <strong>an</strong>d (12)-(15) by imposing G cFF =0<br />
(T FF =0) <strong>an</strong>d G cFB =0 (T FB =0), respectively.<br />
C. Effect <strong>of</strong> PFF Control <strong>an</strong>d Control Trade<strong>of</strong>f<br />
The expression for the input imped<strong>an</strong>ce (12) shows that<br />
the PFF control provides a way to control the converter input<br />
imped<strong>an</strong>ce through the last term on the right h<strong>an</strong>d side <strong>of</strong> (12).<br />
In particular, the PFF control has the effect <strong>of</strong> introducing<br />
damping imped<strong>an</strong>ce Z damp in parallel to the already existing<br />
Z in_FB with the goal <strong>of</strong> stabilizing the system. Given a desired<br />
stabilizing imped<strong>an</strong>ce Z damp , designed so that the bus<br />
imped<strong>an</strong>ce satisfies the PBSC, the tr<strong>an</strong>sfer function <strong>of</strong> the PFF<br />
controller is easily found from the last term on the right h<strong>an</strong>d<br />
side <strong>of</strong> (12) <strong>an</strong>d from the expression <strong>of</strong> the FF loop gain:<br />
G<br />
cFF<br />
T<br />
=<br />
G<br />
FF<br />
ic _ PICM<br />
=<br />
G<br />
1 + TFB<br />
(17)<br />
ic _ PICM<br />
⋅ Z<br />
damp<br />
Even though a switching converter is independently<br />
designed to be stable, its dynamics in a large DC distribution<br />
system, such as <strong>an</strong> <strong>All</strong>-<strong>Electric</strong> <strong>Ship</strong> <strong>MVDC</strong> <strong>Power</strong><br />
<strong>Distribution</strong> System, c<strong>an</strong> be affected by the subsystem it is<br />
connected to. Therefore, two types <strong>of</strong> interactions c<strong>an</strong> be<br />
414
identified: the source subsystem interaction, <strong>an</strong>d the load<br />
subsystem interaction. In this paper, the focus is on the source<br />
subsystem interaction problem, i.e., a degradation <strong>of</strong> the<br />
closed-loop stability <strong>of</strong> a switching converter when it is fed by<br />
a DC voltage source subsystem with finite Thévenin<br />
imped<strong>an</strong>ce Z S . Fig. 4a shows the two-port network terminal<br />
model [29, 30], directly drawn from model (11), for the case<br />
<strong>of</strong> FB only (G cFF (s)=0) with a non-ideal source imped<strong>an</strong>ce Z S .<br />
In terms <strong>of</strong> passivity concept, passivity condition for<br />
Z bus_FB is usually violated around ω res , i.e. the frequency where<br />
Z bus_FB exhibits reson<strong>an</strong>ce, as Fig. 5 shows. Imped<strong>an</strong>ce Z bus_FB<br />
follows the output imped<strong>an</strong>ce <strong>of</strong> the source subsystem Z S<br />
everywhere except around the r<strong>an</strong>ge <strong>of</strong> frequencies where it<br />
exhibits reson<strong>an</strong>ce (in the parallel combination the smaller<br />
imped<strong>an</strong>ce dominates). To solve the passivity condition<br />
violation, i.e. to bring Z bus to the RHP so that it exhibits<br />
positive real part at frequencies around ω res , the PFF control is<br />
added to the conventional FB control according Fig. 3a. If<br />
Z damp is designed so that (18) is satisfied, the passivity<br />
violation c<strong>an</strong> be solved.<br />
Z<br />
1<br />
bus _ FFFB<br />
1<br />
=<br />
Z<br />
S<br />
⎧ 1<br />
⎪<br />
⎪ Z<br />
S<br />
⎪ 1<br />
≈ ⎨<br />
⎪Z<br />
⎪ 1<br />
⎪<br />
⎩ Z<br />
S<br />
1<br />
+<br />
Z<br />
damp<br />
in _ FB<br />
1<br />
+<br />
Z<br />
at low frequencies<br />
at high<br />
damp<br />
atω<br />
= ω<br />
res<br />
frequencies<br />
(18)<br />
Z bus_FFFB is the bus imped<strong>an</strong>ce resulting from the addition <strong>of</strong><br />
the PFF control. In other words, (18) shows that if Z damp is<br />
designed so that it dominates at ω res (note, again, that in the<br />
parallel combination the smallest imped<strong>an</strong>ce dominates), it<br />
c<strong>an</strong> provide the desired passivation effect (see blue arrows in<br />
Fig. 5a), i.e. -90°≤arg[Z bus_FFFB (jω res )]≤90° while leaving the<br />
bus imped<strong>an</strong>ce unch<strong>an</strong>ged everywhere else. This is also<br />
equivalent to moving the Nyquist plot <strong>of</strong> the bus imped<strong>an</strong>ce<br />
from the LHP to the RHP, as the blue arrow in Fig. 5b<br />
indicates.<br />
Fig. 4 shows <strong>an</strong> equivalent model for the system under FB<br />
control only (a) <strong>an</strong>d under FFFB control (b). The feed-forward<br />
action introduces two additional elements, imped<strong>an</strong>ce Z damp on<br />
the source side <strong>an</strong>d a controlled voltage source on the output<br />
side. The imped<strong>an</strong>ce Z damp stabilizes the bus, but at a cost: the<br />
output side voltage source has a negative effect on audio<br />
susceptibility. This represents a trade<strong>of</strong>f between stability<br />
improvement <strong>an</strong>d output perform<strong>an</strong>ce degradation. In fact, as<br />
Fig. 5 also depicts, on the one h<strong>an</strong>d the addition <strong>of</strong> Z damp small<br />
in magnitude at ω res (so that it dominates to solve the passivity<br />
violation problem) is desired for stability improvement<br />
purposes, on the other h<strong>an</strong>d it negatively affects the audiosusceptibility<br />
tr<strong>an</strong>sfer function (14). For this reason, Z damp<br />
should be carefully chosen. Notice that Z damp c<strong>an</strong> be chosen to<br />
be either passive or active imped<strong>an</strong>ce. What it import<strong>an</strong>t is<br />
that it should be chosen so that ||Z damp (jω res )|| be not too small,<br />
but small enough to dominate the bus imped<strong>an</strong>ce at ω res . A<br />
PGM‐M PGM‐M PGM‐M PGM‐M<br />
PCM‐A<br />
PDM‐B<br />
PCM‐B<br />
PCM‐B<br />
PCM‐B<br />
PMM<br />
PDM‐A<br />
In‐Zone <strong>Distribution</strong><br />
PMM<br />
PCM‐B<br />
PCM‐B<br />
PCM‐B<br />
PCM‐A<br />
Figure 6: Traditional 3-PDM IPS Architecture, with the two zones<br />
that will be simulated.<br />
good rule <strong>of</strong> the thumb is to choose Z damp so that<br />
||Z bus_FB (jω res )|| dB is 20-25 dB larger th<strong>an</strong> ||Z damp (jω res )|| dB . Of<br />
course, condition (18) must be respected as well. In particular,<br />
it is desired that arg[Z bus_FFFB (jω res )] lies as close as possible to<br />
0° so that the system has a good passivity margin (it is far<br />
away from the passivity boundary).<br />
IV. SIMULATION RESULTS<br />
In this section, the PBSC is validated by using a switching<br />
model <strong>of</strong> a <strong>MVDC</strong> bus system built in Simulink. The<br />
simulated system is a power down-scaled portion <strong>of</strong> one <strong>of</strong> the<br />
possible Integrated <strong>Power</strong> System (IPS) architectures that<br />
have been proposed in [31]. The architecture taken into<br />
consideration in this paper is the traditional three Propulsion<br />
<strong>Distribution</strong> Module (PDM) ISP architecture, shown in Fig 6.<br />
PDM-A is a HVDC bus (10 KV), PGMs are high frequency<br />
<strong>Power</strong> Generation Modules with rectifier units, PMMs are<br />
Propulsion Motor Modules, PDM-B is a <strong>MVDC</strong> bus (1000 V),<br />
<strong>an</strong>d the <strong>Power</strong> Conversion Modules (PCMs) are switching<br />
converters. Two portions <strong>of</strong> the system in Fig. 6 will be<br />
simulated, represented by areas within the red <strong>an</strong>d blue dashed<br />
lines. Fig. 7 shows the system switching model built in<br />
Simulink. The area within the red dashed line is a cascade <strong>of</strong> a<br />
PICM-FB-controlled buck converter <strong>an</strong>d a PICM-FFFBcontrolled<br />
three-phase voltage source inverter (VSI). The<br />
controller <strong>of</strong> the VSI has a PFF controller in addition to the<br />
conventional FB controller as shown in Fig. 8. The area within<br />
the blue dashed line is the same system with the addition <strong>of</strong> a<br />
high b<strong>an</strong>dwidth CPL, representative <strong>of</strong> <strong>an</strong>other switching<br />
converter or a pulsed load, like a radar or rail-gun for future<br />
naval combat<strong>an</strong>ts. Specifications for both buck converter <strong>an</strong>d<br />
VSI are also reported in Fig. 7. The PFF control was designed<br />
to actively introduce the following damping imped<strong>an</strong>ce at the<br />
VSI input port.<br />
1<br />
Zdamp<br />
= Rb<br />
+ sLb<br />
+<br />
(19)<br />
sCb<br />
where R b =21.34Ω, L b =17.88mH, <strong>an</strong>d C b =157.19µF. The PFF<br />
controller tr<strong>an</strong>sfer function is then calculated from (17).<br />
PDM‐B<br />
415
Figure 7: Cascade <strong>of</strong> a PICM-FB controlled buck converter <strong>an</strong>d a PICM-FFFB-controlled VSI. Another buck converter is used to perturb the bus <strong>an</strong>d<br />
extract bus imped<strong>an</strong>ce. A high b<strong>an</strong>dwidth CPL added to the bus has the effect <strong>of</strong> destabilizing the bus.<br />
Viewed from the bus port, the entire system c<strong>an</strong> be lumped<br />
into a 1-port network, as previously described in Section II.<br />
The digital network <strong>an</strong>alyzer technique [23] is the tool used to<br />
measure the bus imped<strong>an</strong>ce <strong>an</strong>d address system level stability<br />
issues in a <strong>MVDC</strong> power distribution system. This technique<br />
uses a switching converter as a perturbation source, <strong>an</strong>d its<br />
controller as a signal <strong>an</strong>alyzer to measure small-signal tr<strong>an</strong>sfer<br />
functions <strong>an</strong>d imped<strong>an</strong>ces <strong>of</strong> interest. Referring to Fig. 9, a<br />
pseudo-r<strong>an</strong>dom binary sequence (PRBS) test signal is added to<br />
the duty cycle signal from the feedback controller. Applying<br />
the cross-correlation technique to the appropriate measured<br />
qu<strong>an</strong>tities allows online monitoring <strong>of</strong> the bus imped<strong>an</strong>ce<br />
Z bus (s)=V bus (s)/I inj (s).<br />
A. Cascade <strong>of</strong> Buck Converter <strong>an</strong>d VSI<br />
For this case, the system with only FB control is<br />
marginally stable, while the same system with FFFB control is<br />
highly stabilized. Fig. 10 shows the Bode plot <strong>of</strong> the bus<br />
imped<strong>an</strong>ce, which is the parallel combination <strong>of</strong> the output<br />
Figure 8: Control <strong>of</strong> the VSI. PICM-FB loop in the middle <strong>an</strong>d FF loop at the top.<br />
Figure 9: Conceptual block diagram showing injection <strong>of</strong> a test<br />
signal for system bus imped<strong>an</strong>ce measurements.<br />
imped<strong>an</strong>ce <strong>of</strong> the buck converter <strong>an</strong>d the input imped<strong>an</strong>ce <strong>of</strong><br />
the VSI (Eq. (20). The <strong>an</strong>alytical tr<strong>an</strong>sfer functions, given in<br />
(20), are compared with the nonparametric results given by the<br />
digital network <strong>an</strong>alyzer in simulation.<br />
Z<br />
⎛ 1 1 ⎞<br />
_<br />
= ⎜<br />
+ ⎟<br />
(20)<br />
bus CL<br />
⎝ Zout<br />
_ CL(<br />
Buck )<br />
Zin<br />
_ CL(<br />
VSI ) ⎠<br />
where CL denotes either FB or FFFB.<br />
−1<br />
416
240<br />
230<br />
220<br />
210<br />
200<br />
190<br />
180<br />
170<br />
160<br />
150<br />
Magnitude [dB]<br />
Phase [deg]<br />
60<br />
40<br />
20<br />
0<br />
-20<br />
100<br />
50<br />
-50<br />
-100<br />
Magnitude <strong>of</strong> Z bus<br />
10 1 10 2 10 3 10 4<br />
0<br />
Phase <strong>of</strong> Z bus<br />
10 1 10 2 10 3 10 4<br />
Frequency [Hz]<br />
Estimation with FFFB<br />
Analytical TF with FFFB<br />
Analytical TF with FB only<br />
Estimation with FB only<br />
Figure 10: Z bus estimation through PRBS injection <strong>an</strong>d comparison with<br />
<strong>an</strong>alytical tr<strong>an</strong>sfer functions for the cascade <strong>of</strong> buck converter <strong>an</strong>d VSI.<br />
R = 10 ohm -> 20 ohm<br />
Vbus<br />
R = 20 ohm -> 10 ohm<br />
Vabc<br />
FB only<br />
FFFB<br />
arg[Z bus_FB (jω res )]≈±90°. Notice that for both cases the bus<br />
imped<strong>an</strong>ce satisfies the passivity condition, i.e.<br />
-90°≤arg[Z bus (jω)]≤90°, ∀ ω . Fig. 11 depicts the tr<strong>an</strong>sient<br />
responses <strong>of</strong> the bus voltage <strong>an</strong>d three-phase output voltage in<br />
correspondence <strong>of</strong> (a) bal<strong>an</strong>ced three-phase load step <strong>an</strong>d (b)<br />
voltage reference step, starting from a steady-state condition.<br />
Notice the presence <strong>of</strong> sustained oscillations for the FB case<br />
only, <strong>an</strong>d the stabilization <strong>of</strong> the bus voltage for the FFFB<br />
case. Moreover, the three-phase output voltage is somehow<br />
more distorted during the tr<strong>an</strong>sient for the FFFB case. This is<br />
due to the fact that the PFF control alters the audiosusceptibility<br />
<strong>of</strong> the VSI, as discussed in Section III. However,<br />
Fig. 11 shows that a good trade-<strong>of</strong>f between stability<br />
improvement <strong>an</strong>d FB control b<strong>an</strong>dwidth reduction has been<br />
achieved.<br />
B. Addition <strong>of</strong> a High B<strong>an</strong>dwidth CPL<br />
The addition <strong>of</strong> a high b<strong>an</strong>dwidth CPL (P CPL =300W)<br />
further deteriorates the passivity condition <strong>an</strong>d the stability <strong>of</strong><br />
the system. The system with only FB control is now unstable,<br />
while the same system with FFFB control is again highly<br />
stabilized. Fig. 12 shows the Bode plot <strong>of</strong> the bus imped<strong>an</strong>ce.<br />
The <strong>an</strong>alytical tr<strong>an</strong>sfer function for the bus imped<strong>an</strong>ce, given<br />
in (21), now includes the CPL load input imped<strong>an</strong>ce in<br />
parallel. The <strong>an</strong>alytical results are compared with the<br />
nonparametric results given by the digital network <strong>an</strong>alyzer<br />
simulation.<br />
100<br />
50<br />
0<br />
-50<br />
-100<br />
-150<br />
300<br />
280<br />
260<br />
240<br />
220<br />
200<br />
180<br />
160<br />
140<br />
120<br />
150<br />
100<br />
50<br />
0<br />
-50<br />
R = 10 ohm -> 20 ohm<br />
R = 20 ohm -> 10 ohm<br />
0.1 0.15 0.2 0.25<br />
(a)<br />
Vbus<br />
Vref = 90 Vpk -> 45 Vpk<br />
Vref = 45 Vpk -> 90 Vpk<br />
Vabc<br />
FB only<br />
FFFB<br />
Z ⎛ 1 1 1 ⎞<br />
_<br />
= ⎜<br />
+ + ⎟<br />
(21)<br />
bus CL<br />
⎝ Zout<br />
_ CL(<br />
Buck )<br />
Zin<br />
_ CL(<br />
VSI )<br />
Zin<br />
_ CPL ⎠<br />
where CL denotes either FB or FFFB, <strong>an</strong>d Z in_CPL =-V 2 bus /P CPL .<br />
As shown in Fig. 12, in the stable case the bus imped<strong>an</strong>ce<br />
well satisfies the passivity condition because<br />
arg[Z bus_FFFB (jω res )]≈0°, while in the unstable stable case the<br />
passivity condition is not met because arg[Z bus_FB (jω)] goes<br />
beyond ±90° for some frequencies near the reson<strong>an</strong>t<br />
frequency. Note that at low frequency the phase is -270°,<br />
which is the same as +90°, <strong>an</strong>d at high frequency the phase is<br />
-90°; however around the reson<strong>an</strong>t frequency the phase<br />
exceeds the ±90° r<strong>an</strong>ge. Fig. 13 depicts the tr<strong>an</strong>sient responses<br />
<strong>of</strong> the bus voltage, three-phase output voltage, in<br />
correspondence <strong>of</strong> (a) symmetric three-phase load step, (b)<br />
voltage reference step, <strong>an</strong>d (c) CPL power step, starting from a<br />
steady-state condition. Notice the instability for the FB case<br />
only, <strong>an</strong>d the stabilization <strong>of</strong> the bus voltage for the FFFB<br />
case.<br />
−1<br />
-100<br />
-150<br />
Vref = 90 Vpk -> 45 Vpk<br />
Vref = 45 Vpk -> 90 Vpk<br />
0.1 0.15 0.2 0.25<br />
(b)<br />
Figure 11: Time-domain results for the cascade <strong>of</strong> buck converter <strong>an</strong>d VSI.<br />
Comparison <strong>of</strong> FB only <strong>an</strong>d FFFB in correspondence to (a) bal<strong>an</strong>ced resistive<br />
step applied to the VSI <strong>an</strong>d (b) voltage reference step applied to the VSI.<br />
As shown in Fig. 10, in the stable case the bus imped<strong>an</strong>ce<br />
well satisfies the passivity condition at the reson<strong>an</strong>t frequency,<br />
because arg[Z bus_FFFB (jω res )]≈0°, while in the marginally<br />
stable case the passivity condition is only weakly met, because<br />
CONCLUSIONS<br />
The PBSC has been proposed as a new stability criterion<br />
based on the passivity <strong>of</strong> the bus imped<strong>an</strong>ce. If that imped<strong>an</strong>ce<br />
is passive then the entire system is stable. Adv<strong>an</strong>tages <strong>of</strong> the<br />
PBSC over prior stability criteria, based on the minor loop<br />
gain concept, have been discussed. Combined with the PFF<br />
control, it is possible to design stabilizing virtual damping<br />
imped<strong>an</strong>ces so that the PBSC is satisfied. The usefulness <strong>of</strong><br />
the PBSC in system stability online monitoring <strong>an</strong>d design so<br />
that the entire system is stable <strong>an</strong>d well-behaved has been<br />
proved by the switching model simulation <strong>of</strong> a portion <strong>of</strong> the<br />
417
three-PDM ISP architecture proposed for the <strong>MVDC</strong> <strong>Power</strong><br />
<strong>Distribution</strong> System for the <strong>All</strong>-<strong>Electric</strong> <strong>Ship</strong>. Frequency <strong>an</strong>d<br />
time domain results have validated the proposed method.<br />
350<br />
300<br />
250<br />
Vbus<br />
Magnitude <strong>of</strong> Z bus<br />
60<br />
Estimation with FFFB<br />
200<br />
Analytical TF with FFFB<br />
Magnitude [dB]<br />
40<br />
20<br />
0<br />
Analytical TF with FB only<br />
Estimation with FB only<br />
150<br />
100<br />
150<br />
100<br />
R = 10 ohm -> 20 ohm<br />
R = 20 ohm -> 10 ohm<br />
Vabc<br />
FB only<br />
FFFB<br />
50<br />
-20<br />
10 1 10 2 10 3 10 4<br />
0<br />
Phase <strong>of</strong> Z bus<br />
-50<br />
100<br />
-100<br />
0<br />
-150<br />
R = 10 ohm -> 20 ohm<br />
R = 20 ohm -> 10 ohm<br />
0.1 0.15 0.2 0.25<br />
Phase [deg]<br />
-100<br />
(a)<br />
-200<br />
350<br />
Vbus<br />
-300<br />
10 1 10 2 10 3 10 4<br />
Frequency [Hz]<br />
Figure 12: Z bus estimation through PRBS injection <strong>an</strong>d comparison with<br />
<strong>an</strong>alytical tr<strong>an</strong>sfer functions for the cascade <strong>of</strong> buck converter <strong>an</strong>d VSI <strong>an</strong>d the<br />
addition <strong>of</strong> a 300W CPL.<br />
300<br />
250<br />
200<br />
150<br />
100<br />
REFERENCES<br />
[1] Parker, D.S.; Hodge, C.G., "The electric warship [electric propulsion],"<br />
<strong>Power</strong> Engineering Journal, Volume: 12 Issue: 1 , Feb. 1998, Page(s): 5<br />
-13.<br />
[2] Clayton, D.A.; Sudh<strong>of</strong>f, S.D.; Grater, G.F., "<strong>Electric</strong> ship drive <strong>an</strong>d<br />
power system," <strong>Power</strong> Modulator Symposium, 2000. Conference<br />
Record <strong>of</strong> the 2000 Twenty-Fourth International, 2000, Page(s): 85 -88.<br />
[3] N. Doerry, Next Generation Integrated <strong>Power</strong> Systems, NGIPS Master<br />
Pl<strong>an</strong>, Whashington, DC: Naval Sea Systems Comm<strong>an</strong>d, 2007.<br />
[4] IEEE Std 1709-2010, "IEEE Recommended Practice for 1 kV to 35 kV<br />
Medium-Voltage DC <strong>Power</strong> Systems on <strong>Ship</strong>s," IEEE Std 1709-2010,<br />
vol., no., pp.1-54, Nov. 2 2010.<br />
[5] Emadi, A. Khaligh, C. H. Rivetta, <strong>an</strong>d G. A. Williamson, "Const<strong>an</strong>t<br />
power loads <strong>an</strong>d negative imped<strong>an</strong>ce instability in automotive systems:<br />
definition, modeling, stability, <strong>an</strong>d control <strong>of</strong> power electronic<br />
converters <strong>an</strong>d motor drives," IEEE Tr<strong>an</strong>s. Vehicular Technology, vol.<br />
55, pp. 1112-1125, Jul. 2006.<br />
[6] Y. J<strong>an</strong>g <strong>an</strong>d R. W. Erickson, "Physical origins <strong>of</strong> input filter<br />
oscillations in current programmed converters," IEEE Tr<strong>an</strong>s. <strong>Power</strong><br />
Electronics, vol. 7, no. 4, pp. 725-733, Jul. 1992.<br />
[7] Emadi, A.; Ehs<strong>an</strong>i, A.; , "Dynamics <strong>an</strong>d control <strong>of</strong> multi-converter DC<br />
power electronic systems ," <strong>Power</strong> Electronics Specialists Conference,<br />
2001. PESC. 2001 IEEE 32nd Annual , vol.1, no., pp.248-253 vol. 1,<br />
2001.<br />
[8] A. Emadi, B. Fahimi, <strong>an</strong>d M. Ehs<strong>an</strong>i, "On the concept <strong>of</strong> negative<br />
imped<strong>an</strong>ce instability in adv<strong>an</strong>ced aircraft power systems with const<strong>an</strong>t<br />
power loads," Society <strong>of</strong> Automotive Engineers (SAE) Journal, Paper<br />
No. 1999-01-2545, 1999.<br />
[9] Middlebrook, R.D., "Input Filter Considerations in Design <strong>an</strong>d<br />
Application <strong>of</strong> Switching Regulators," IEEE IAS Annual Meeting,<br />
1976.<br />
[10] Wildrick, C.M.; Lee, F.C.; Cho, B.H.; Choi, B.; , "A method <strong>of</strong><br />
defining the load imped<strong>an</strong>ce specification for a stable distributed power<br />
system," <strong>Power</strong> Electronics, IEEE Tr<strong>an</strong>sactions on , vol.10, no.3,<br />
pp.280-285, May 1995.<br />
[11] Xiaog<strong>an</strong>g Feng; Zhihong Ye; Kun Xing; Lee, F.C.; Borojevic, D.; ,<br />
"Imped<strong>an</strong>ce specification <strong>an</strong>d imped<strong>an</strong>ce improvement for DC<br />
distributed power system," <strong>Power</strong> Electronics Specialists Conference,<br />
1999. PESC 99. 30th Annual IEEE , vol.2, no., pp.889-894 vol.2, 1999.<br />
50<br />
150<br />
100<br />
50<br />
0<br />
-50<br />
-100<br />
-150<br />
240<br />
220<br />
200<br />
180<br />
160<br />
150<br />
100<br />
50<br />
0<br />
-50<br />
-100<br />
-150<br />
300<br />
250<br />
200<br />
150<br />
100<br />
50<br />
0<br />
Vref = 90 Vpk -> 45 Vpk<br />
Vref = 90 Vpk -> 45 Vpk<br />
Vref = 45 Vpk -> 90 Vpk<br />
0.1 0.15 0.2 0.25<br />
Vabc<br />
Vref = 45 Vpk -> 90 Vpk<br />
(b)<br />
Vbus<br />
Vabc<br />
P_CPL<br />
0.05 0.1 0.15 0.2 0.25<br />
(c)<br />
Figure 13: Time-domain results for the cascade <strong>of</strong> buck converter <strong>an</strong>d VSI<br />
with the addition <strong>of</strong> a 300W CPL connected to the bus. Comparison <strong>of</strong> FB<br />
only <strong>an</strong>d FFFB in correspondence to (a) bal<strong>an</strong>ced resistive step applied to the<br />
VSI, (b) voltage reference step applied to the VSI, <strong>an</strong>d (c) CPL power step.<br />
FB only<br />
FFFB<br />
FB only<br />
FFFB<br />
418
[12] Xiaog<strong>an</strong>g Feng; Zhihong Ye; Kun Xing; Lee, F.C.; Borojevic, D.; ,<br />
"Individual load imped<strong>an</strong>ce specification for a stable DC distributed<br />
power system," Applied <strong>Power</strong> Electronics Conference <strong>an</strong>d Exposition,<br />
1999. APEC '99. Fourteenth Annual , vol.2, no., pp.923-929 vol.2, 14-<br />
18 Mar 1999.<br />
[13] Xiaog<strong>an</strong>g Feng; Jinjun Liu; Lee, F.C.; , "Imped<strong>an</strong>ce specifications for<br />
stable DC distributed power systems ," <strong>Power</strong> Electronics, IEEE<br />
Tr<strong>an</strong>sactions on , vol.17, no.2, pp.157-162, Mar 2002.<br />
[14] Sudh<strong>of</strong>f, S.D.; Glover, S.F.; Lamm, P.T.; Schmucker, D.H.; Delisle,<br />
D.E.; , "Admitt<strong>an</strong>ce space stability <strong>an</strong>alysis <strong>of</strong> power electronic<br />
systems," Aerospace <strong>an</strong>d Electronic Systems, IEEE Tr<strong>an</strong>sactions on ,<br />
vol.36, no.3, pp. 965- 973, Jul 2000.<br />
[15] Sudh<strong>of</strong>f, S.D.; Glover, S.F.; , "Three-dimensional stability <strong>an</strong>alysis <strong>of</strong><br />
DC power electronics based systems," <strong>Power</strong> Electronics Specialists<br />
Conference, 2000. PESC 00. 2000 IEEE 31st Annual , vol.1, no.,<br />
pp.101-106 vol.1, 2000.<br />
[16] Sudh<strong>of</strong>f, S.D.; Crider, J.M.; , "Adv<strong>an</strong>cements in generalized<br />
immitt<strong>an</strong>ce based stability <strong>an</strong>alysis <strong>of</strong> DC power electronics based<br />
distribution systems," <strong>Electric</strong> <strong>Ship</strong> Technologies Symposium (ESTS),<br />
2011 IEEE , vol., no., pp.207-212, 10-13 April 2011.<br />
[17] Riccobono, A.; S<strong>an</strong>ti, E.; , "Comprehensive review <strong>of</strong> stability criteria<br />
for DC distribution systems," Energy Conversion Congress <strong>an</strong>d<br />
Exposition (ECCE), 2012 IEEE , vol., no., pp.3917-3925, 15-20 Sept.<br />
2012.<br />
[18] P<strong>an</strong>ov, Y.; Jov<strong>an</strong>ovic, M.; , "Practical issues <strong>of</strong> input/output imped<strong>an</strong>ce<br />
measurements in switching power supplies <strong>an</strong>d application <strong>of</strong> measured<br />
data to stability <strong>an</strong>alysis," Applied <strong>Power</strong> Electronics Conference <strong>an</strong>d<br />
Exposition, 2005. APEC 2005. Twentieth Annual IEEE , vol.2, no.,<br />
pp.1339-1345 Vol. 2, 6-10 March 2005.<br />
[19] Xiaog<strong>an</strong>g Feng; Lee, F.C.; , "On-line measurement on stability margin<br />
<strong>of</strong> DC distributed power system," Applied <strong>Power</strong> Electronics<br />
Conference <strong>an</strong>d Exposition, 2000. APEC 2000. Fifteenth Annual IEEE ,<br />
vol.2, no., pp.1190-1196 vol.2, 2000.<br />
[20] Riccobono, A.; S<strong>an</strong>ti, E.; , "A novel Passivity-Based <strong>Stability</strong> Criterion<br />
(PBSC) for switching converter DC distribution systems," Applied<br />
<strong>Power</strong> Electronics Conference <strong>an</strong>d Exposition (APEC), 2012 Twenty-<br />
Seventh Annual IEEE , vol., no., pp.2560-2567, 5-9 Feb. 2012.<br />
[21] Riccobono, A.; S<strong>an</strong>ti, E.; , "Positive Feedforward Control <strong>of</strong> Three-<br />
Phase Voltage Source Inverter for DC Input Bus Stabilization With<br />
Experimental Validation," Industry Applications, IEEE Tr<strong>an</strong>sactions on<br />
, vol.49, no.1, pp.168-177, J<strong>an</strong>.-Feb. 2013.<br />
[22] Riccobono, A.; S<strong>an</strong>ti, E.; , "Positive Feed-Forward control <strong>of</strong> threephase<br />
voltage source inverter for DC input bus stabilization," Applied<br />
<strong>Power</strong> Electronics Conference <strong>an</strong>d Exposition (APEC), 2011 Twenty-<br />
Sixth Annual IEEE , vol., no., pp.741-748, 6-11 March 2011.<br />
[23] Barkley, A.; S<strong>an</strong>ti, E.; , "Improved Online Identification <strong>of</strong> a DC–DC<br />
Converter <strong>an</strong>d Its Control Loop Gain Using Cross-Correlation<br />
Methods," <strong>Power</strong> Electronics, IEEE Tr<strong>an</strong>sactions on , vol.24, no.8,<br />
pp.2021-2031, Aug. 2009.<br />
[24] J. E. Colgate; “The control <strong>of</strong> dynamically interacting systems”, S.M.<br />
thesis, M.I.T. 1998, Pages 52–53, 70-76.<br />
[25] S. Hiti, D. Boroyevich, <strong>an</strong>d C. Cuadros, "Small-signal modeling <strong>an</strong>d<br />
control <strong>of</strong> three-phase PWM converters," in Proc. IEEE Industry<br />
Applications Society Annual Meeting, vol. 2, Oct. 1994, pp. 1143-<br />
1150.<br />
[26] Cho, H.Y.; S<strong>an</strong>ti, E.; , "Modeling <strong>an</strong>d <strong>Stability</strong> <strong>Analysis</strong> <strong>of</strong> Cascaded<br />
Multi-Converter Systems Including Feedforward <strong>an</strong>d Feedback<br />
Control," Industry Applications Society Annual Meeting, 2008. IAS<br />
'08. IEEE , vol., no., pp.1-8, 5-9 Oct. 2008.<br />
[27] H. Y. Cho <strong>an</strong>d E. S<strong>an</strong>ti, "Modeling <strong>an</strong>d stability <strong>an</strong>alysis in multiconverter<br />
systems including positive feedforward control," in Proc.<br />
IEEE 34th Annual Conference IECON08, Nov. 2008, pp. 839-844.<br />
[28] Ahmadi, R.; Paschedag, D.; Ferdowsi, M.; , "Closed-loop input <strong>an</strong>d<br />
output imped<strong>an</strong>ces <strong>of</strong> DC-DC switching converters operating in voltage<br />
<strong>an</strong>d current mode control," IECON 2010 - 36th Annual Conference on<br />
IEEE Industrial Electronics Society , vol., no., pp.2311-2316, 7-10<br />
Nov. 2010.<br />
[29] Cvetkovic, I.; Boroyevich, D.; Mattavelli, P.; Lee, F. C.; Dong, D.; ,<br />
"Unterminated Small-Signal Behavioral Model <strong>of</strong> DC–DC Converters,"<br />
<strong>Power</strong> Electronics, IEEE Tr<strong>an</strong>sactions on , vol.28, no.4, pp.1870-1879,<br />
April 2013.<br />
[30] Arnedo, L.; Burgos, R.; Boroyevich, D.; W<strong>an</strong>g, F.; , "System-Level<br />
Black-Box Dc-to-Dc Converter Models," Applied <strong>Power</strong> Electronics<br />
Conference <strong>an</strong>d Exposition, 2009. APEC 2009. Twenty-Fourth Annual<br />
IEEE , vol., no., pp.1476-1481, 15-19 Feb. 2009.<br />
[31] CAPT Norbert Doerry, " Open Architecture Approach for the Next<br />
Generation Integrated <strong>Power</strong> System ," Presented at the ASNE<br />
Automation <strong>an</strong>d Controls Symposium 2007, Biloxi, MS, Dec 10-11,<br />
2007.<br />
419













