Projective geometry for Computer Vision
Projective geometry for Computer Vision
Projective geometry for Computer Vision

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
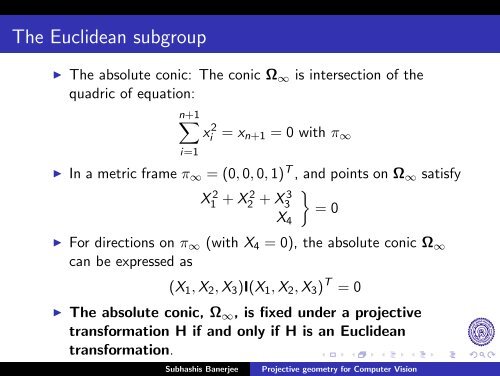
The Euclidean subgroup<br />
◮ The absolute conic: The conic Ω ∞ is intersection of the<br />
quadric of equation:<br />
∑<br />
n+1<br />
xi<br />
2<br />
i=1<br />
= x n+1 = 0 with π ∞<br />
◮ In a metric frame π ∞ = (0, 0, 0, 1) T , and points on Ω ∞ satisfy<br />
X1 2 + X 2 2 + X 3<br />
3 }<br />
= 0<br />
X 4<br />
◮ For directions on π ∞ (with X 4 = 0), the absolute conic Ω ∞<br />
can be expressed as<br />
(X 1 , X 2 , X 3 )I(X 1 , X 2 , X 3 ) T = 0<br />
◮ The absolute conic, Ω ∞ , is fixed under a projective<br />
trans<strong>for</strong>mation H if and only if H is an Euclidean<br />
trans<strong>for</strong>mation.<br />
Subhashis Banerjee<br />
<strong>Projective</strong> <strong>geometry</strong> <strong>for</strong> <strong>Computer</strong> <strong>Vision</strong>