Vision and GPS-based autonomous vehicle navigation using ...
Vision and GPS-based autonomous vehicle navigation using ...
Vision and GPS-based autonomous vehicle navigation using ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
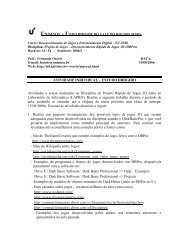
(a) Steering of topology 4 (Test 4 LS)<br />
Figure 7: Steering wheel <strong>using</strong> the test data.<br />
(b) Steering of topology 5 (Test 3 HT)<br />
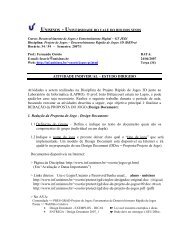
(c) Velocity of topology 4 (Test 4 LS)<br />
(d) Velocity of topology 5 (Test 3 HT)<br />
Figure 6: Error histogram considering different hidden<br />
layers of the best ANNs (MSE = 2.048 [topology<br />
4] <strong>and</strong> MSE = 1.881 [topology 5]) (a) <strong>using</strong> steering<br />
angle data of topology 4 (logistic sigmoid [LS]), (b)<br />
steering angle data of topology 5 (hyperbolic tangent<br />
[HT]), (c) velocity data of topology 4, <strong>and</strong> (d)<br />
velocity of topology 5. The x axis shows the error.<br />
[7] B. Martin, I. Karl, <strong>and</strong> S. Sanjiv. The DARPA Urban<br />
Challenge, volume 56. Springer Tracts in Advanced<br />
Robotics, 2010.<br />
[8] R. J. Oentaryo <strong>and</strong> M. Pasquier. Gensofnn-yager: A<br />
novel hippocampus-like learning memory system<br />
realizing yager inference. In IJCNN, pages 1684–1691.<br />
285<br />
Figure 8: Velocity <strong>using</strong> the test data.<br />
[9] A. Petrovskaya <strong>and</strong> S. Thrun. Model <strong>based</strong> <strong>vehicle</strong><br />
detection <strong>and</strong> tracking for <strong>autonomous</strong> urban driving.<br />
Autonomous Robots Journal, 26(2-3):123–139, 2009.<br />
[10] A. Petrovskaya <strong>and</strong> S. Thrun. Model <strong>based</strong> <strong>vehicle</strong><br />
tracking in urban environments. IEEE ICRA, 2009.<br />
[11] D. A. Pomerleau. ALVINN: An Autonomous L<strong>and</strong><br />
Vehicle In a Neural Network. Advances In Neural<br />
Information Processing Systems, 1989.<br />
[12] S. S. Shapiro <strong>and</strong> M. B. Wilk. An analysis of variance<br />
test for normality (complete samples). Biometrika,<br />
52(3–4):591–611, 1965.<br />
[13] P. Y. Shinzato <strong>and</strong> D. F. Wolf. A road following<br />
approach <strong>using</strong> artificial neural networks<br />
combinations. Journal of Intelligent <strong>and</strong> Robotic<br />
Systems, 62(3):527–546, 2010.<br />
[14] J. R. Souza, G. Pessin, F. S. Osório, <strong>and</strong> D. F. Wolf.<br />
<strong>Vision</strong>-<strong>based</strong> <strong>autonomous</strong> <strong>navigation</strong> <strong>using</strong> supervised<br />
learning techniques. In 12th Engineering Applications<br />
of Neural Networks (EANN’11), 2011.<br />
[15] J. R. Souza, G. Pessin, P. Y. Shinzato, F. S. Osório,<br />
<strong>and</strong> D. F. Wolf. <strong>Vision</strong>-<strong>based</strong> <strong>autonomous</strong> <strong>navigation</strong><br />
<strong>using</strong> neural networks <strong>and</strong> templates in urban<br />
environments. First Brazilian Conference on Critical<br />
Embedded Systems (I CBSEC), pages 55–60, 2011.<br />
[16] J. R. Souza, D. O. Sales, P. Y. Shinzato, F. S. Osório,<br />
<strong>and</strong> D. F. Wolf. Template-<strong>based</strong> <strong>autonomous</strong><br />
<strong>navigation</strong> <strong>and</strong> obstacle avoidance in urban<br />
environments. SIGAPP - Applied Comp. Rev., 2011.<br />
[17] J. R. Souza, D. O. Sales, P. Y. Shinzato, F. S. Osório,<br />
<strong>and</strong> D. F. Wolf. Template-<strong>based</strong> <strong>autonomous</strong><br />
<strong>navigation</strong> in urban environments. In 26th ACM<br />
Symp. on Applied Computing, pages 1376–1381, 2011.<br />
[18] P. S. Stein <strong>and</strong> V. Santos. Visual guidance of an<br />
<strong>autonomous</strong> robot <strong>using</strong> machine learning. 7th IFAC<br />
Symposium on Intelligent Autonomous Vehicles, 2010.