

Planning under Uncertainty in Dynamic Domains - Carnegie Mellon ...
Planning under Uncertainty in Dynamic Domains - Carnegie Mellon ...
Planning under Uncertainty in Dynamic Domains - Carnegie Mellon ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
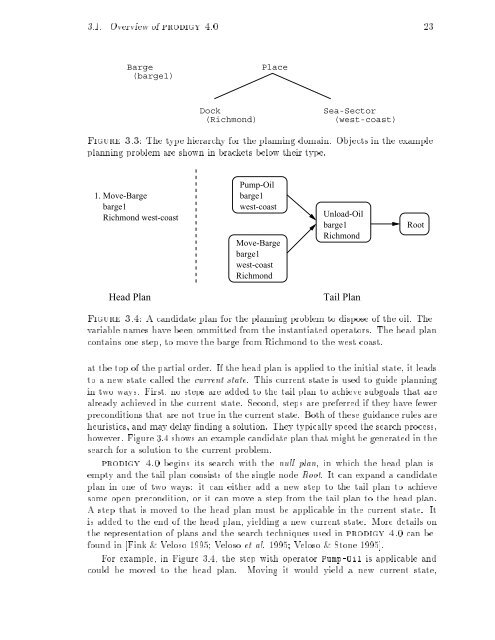
3.1. Overview of prodigy 4.0 23Barge(barge1)PlaceDock(Richmond)Sea-Sector(west-coast)Figure 3.3: The type hierarchy for the plann<strong>in</strong>g doma<strong>in</strong>. Objects <strong>in</strong> the exampleplann<strong>in</strong>g problem are shown <strong>in</strong> brackets below their type.1. Move-Bargebarge1Richmond west-coastPump-Oilbarge1west-coastMove-Bargebarge1west-coastRichmondUnload-Oilbarge1RichmondRootHead PlanTail PlanFigure 3.4: A candidate plan for the plann<strong>in</strong>g problem to dispose of the oil. Thevariable names have been ommitted from the <strong>in</strong>stantiated operators. The head planconta<strong>in</strong>s one step, to move the barge from Richmond to the west coast.at the top of the partial order. If the head plan is applied to the <strong>in</strong>itial state, it leadsto a new state called the current state. This current state is used to guide plann<strong>in</strong>g<strong>in</strong> two ways. First, no steps are added to the tail plan to achieve subgoals that arealready achieved <strong>in</strong> the current state. Second, steps are preferred if they have fewerpreconditions that are not true <strong>in</strong> the current state. Both of these guidance rules areheuristics, and may delay nd<strong>in</strong>g a solution. They typically speed the search process,however. Figure 3.4 shows an example candidate plan that might be generated <strong>in</strong> thesearch for a solution to the current problem.prodigy 4.0 beg<strong>in</strong>s its search with the null plan, <strong>in</strong> which the head plan isempty and the tail plan consists of the s<strong>in</strong>gle node Root. It can expand a candidateplan <strong>in</strong> one of two ways: it can either add a new step to the tail plan to achievesome open precondition, or it can move a step from the tail plan to the head plan.A step that is moved to the head plan must be applicable <strong>in</strong> the current state. Itis added to the end of the head plan, yield<strong>in</strong>g a new current state. More details onthe representation of plans and the search techniques used <strong>in</strong> prodigy 4.0 can befound <strong>in</strong> [F<strong>in</strong>k & Veloso 1995; Veloso et al. 1995; Veloso & Stone 1995].For example, <strong>in</strong> Figure 3.4, the step with operator Pump-Oil is applicable andcould be moved to the head plan. Mov<strong>in</strong>g it would yield a new current state,




