

Planning under Uncertainty in Dynamic Domains - Carnegie Mellon ...
Planning under Uncertainty in Dynamic Domains - Carnegie Mellon ...
Planning under Uncertainty in Dynamic Domains - Carnegie Mellon ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
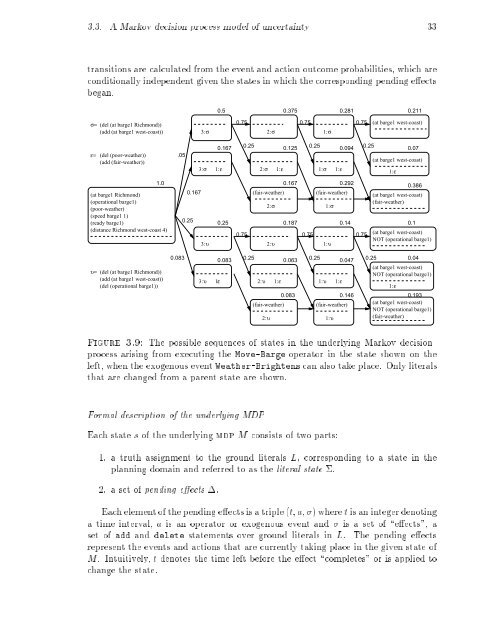
3.3. A Markov decision process model of uncerta<strong>in</strong>ty 33transitions are calculated from the event and action outcome probabilities, which areconditionally <strong>in</strong>dependent given the states <strong>in</strong> which the correspond<strong>in</strong>g pend<strong>in</strong>g eectsbegan.0.50.3750.2810.211σ= (del (at barge1 Richmond))(add (at barge1 west-coast))3: σ0.752: σ0.751: σ0.75(at barge1 west-coast)ε= (del (poor-weather)).05(add (fair-weather))3: σ 1: ε0.1670.252: σ 1: ε0.1250.251: σ1: ε0.0940.250.07(at barge1 west-coast)1: ε1.0(at barge1 Richmond)(operational barge1)(poor-weather)(speed barge1 1)(ready barge1)(distance Richmond west-coast 4)0.1670.253: υ0.250.75(fair-weather)2: σ2: υ0.1670.1870.751: σ1: υ0.292(fair-weather)0.140.750.386(at barge1 west-coast)(fair-weather)0.1(at barge1 west-coast)NOT (operational barge1)υ= (del (at barge1 Richmond))(add (at barge1 west-coast))(del (operational barge1))0.0830.0833: υ 1: ε0.252: υ2: υ1: ε(fair-weather)0.0630.0830.251: υ1: υ1: ε0.0470.146(fair-weather)0.250.04(at barge1 west-coast)NOT (operational barge1)1: ε0.193(at barge1 west-coast)NOT (operational barge1)(fair-weather)Figure 3.9: The possible sequences of states <strong>in</strong> the <strong>under</strong>ly<strong>in</strong>g Markov decisionprocess aris<strong>in</strong>g from execut<strong>in</strong>g the Move-Barge operator <strong>in</strong> the state shown on theleft, when the exogenous event Weather-Brightens can also take place. Only literalsthat are changed from a parent state are shown.Formal description of the <strong>under</strong>ly<strong>in</strong>g MDPEach state s of the <strong>under</strong>ly<strong>in</strong>g mdp M consists of two parts:1. a truth assignment to the ground literals L, correspond<strong>in</strong>g to a state <strong>in</strong> theplann<strong>in</strong>g doma<strong>in</strong> and referred to as the literal state .2. a set of pend<strong>in</strong>g eects .Each element of the pend<strong>in</strong>g eects is a triple (t; a; ) where t is an <strong>in</strong>teger denot<strong>in</strong>ga time <strong>in</strong>terval, a is an operator or exogenous event and is a set of \eects", aset of add and delete statements over ground literals <strong>in</strong> L. The pend<strong>in</strong>g eectsrepresent the events and actions that are currently tak<strong>in</strong>g place <strong>in</strong> the given state ofM. Intuitively, t denotes the time left before the eect \completes" or is applied tochange the state.




