An Iterative Algorithm and Low Complexity Hardware Architecture ...
An Iterative Algorithm and Low Complexity Hardware Architecture ...
An Iterative Algorithm and Low Complexity Hardware Architecture ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
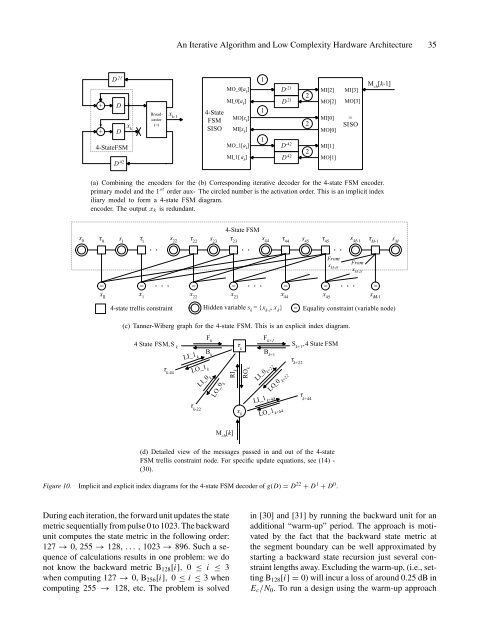
<strong>An</strong> <strong>Iterative</strong> <strong>Algorithm</strong> <strong>and</strong> <strong>Low</strong> <strong>Complexity</strong> <strong>Hardware</strong> <strong>Architecture</strong> 35D 21MO_0[a k]1D -21 2MI[2]MI[3]M ch[k-1]+ D+ D4-StateFSMD 42x kBroadcaster(=)x k-14-StateFSMSISOMI_0[a k] D 21MO[x k]MI[x k]MO_1[a k]MI_1[ a k]11D -42D 4222MO[2]MI[0]MO[0]MI[1]MO[1]MO[3]=SISO(a) Combining the encoders for the (b) Corresponding iterative decoder for the 4-state FSM encoder.primary model <strong>and</strong> the 1 st order auxiliarymodel to form a 4-state FSM diagram.The circled number is the activation order. This is an implicit indexencoder. The output x k is redundant.s 04-State FSMτ s τ τ τ0112223τ τ τ44s M-1 M-145x M-45s M=x 0==x 1x 22s 22s 23=x 23=x 44s 44s 45=FromFromx M-23x 45=x M-14-state trellis constraint Hidden variable s k= {x k-1, x k} = Equality constraint (variable node)(c) Tanner-Wiberg graph for the 4-state FSM. This is an explicit index diagram.F k+14 State FSM, S k τS k+1, 4 State FSMB kτk-44LI_1 kτF kLO_1 kk-22LI_0 kLO_0 kRI kRO kx kkB k+1LI_0 k+22LI_1 k+44LO_0 k+22LO_1 k+44τk+22τk+44M ch[k](d) Detailed view of the messages passed in <strong>and</strong> out of the 4-stateFSM trellis constraint node. For specific update equations, see (14) -(30).Figure 10. Implicit <strong>and</strong> explicit index diagrams for the 4-state FSM decoder of g(D) = D 22 + D 1 + D 0 .During each iteration, the forward unit updates the statemetric sequentially from pulse 0 to 1023. The backwardunit computes the state metric in the following order:127 → 0, 255 → 128, . . . , 1023 → 896. Such a sequenceof calculations results in one problem: we donot know the backward metric B 128 [i], 0 ≤ i ≤ 3when computing 127 → 0, B 256 [i], 0 ≤ i ≤ 3 whencomputing 255 → 128, etc. The problem is solvedin [30] <strong>and</strong> [31] by running the backward unit for anadditional “warm-up” period. The approach is motivatedby the fact that the backward state metric atthe segment boundary can be well approximated bystarting a backward state recursion just several constraintlengths away. Excluding the warm-up, (i.e., settingB 128 [i] = 0) will incur a loss of around 0.25 dB inE c /N 0 . To run a design using the warm-up approach