04 Steering And Turning Vehicles - Department of Mechanical ...
04 Steering And Turning Vehicles - Department of Mechanical ...
04 Steering And Turning Vehicles - Department of Mechanical ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
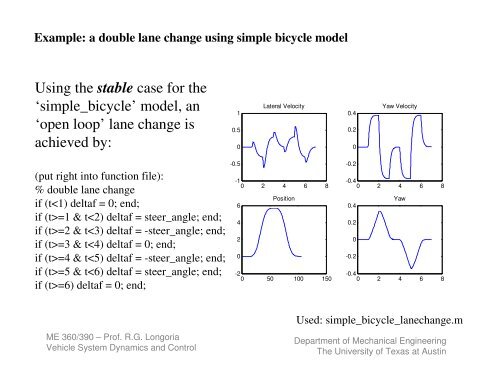
Example: a double lane change using simple bicycle model<br />
Using the stable case for the<br />
‘simple_bicycle’ model, an<br />
‘open loop’ lane change is<br />
achieved by:<br />
(put right into function file):<br />
% double lane change<br />
if (t=1 & t=2 & t=3 & t=4 & t=5 & t=6) deltaf = 0; end;<br />
ME 360/390 – Pr<strong>of</strong>. R.G. Longoria<br />
Vehicle System Dynamics and Control<br />
1<br />
0.5<br />
0<br />
-0.5<br />
Lateral Velocity<br />
-1<br />
0 2 4 6 8<br />
6<br />
4<br />
2<br />
0<br />
Position<br />
-2<br />
0 50 100 150<br />
0.4<br />
0.2<br />
0<br />
-0.2<br />
Yaw Velocity<br />
-0.4<br />
0 2 4 6 8<br />
0.4<br />
0.2<br />
0<br />
-0.2<br />
Yaw<br />
-0.4<br />
0 2 4 6 8<br />
Used: simple_bicycle_lanechange.m<br />
<strong>Department</strong> <strong>of</strong> <strong>Mechanical</strong> Engineering<br />
The University <strong>of</strong> Texas at Austin