04 Steering And Turning Vehicles - Department of Mechanical ...
04 Steering And Turning Vehicles - Department of Mechanical ...
04 Steering And Turning Vehicles - Department of Mechanical ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Y<br />
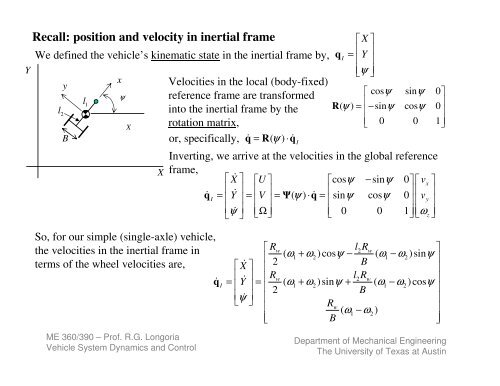
Recall: position and velocity in inertial frame<br />
We defined the vehicle’s kinematic state in the inertial frame by,<br />
l2<br />
y<br />
B<br />
l1<br />
x<br />
ψ<br />
So, for our simple (single-axle) vehicle,<br />
the velocities in the inertial frame in<br />
terms <strong>of</strong> the wheel velocities are,<br />
ME 360/390 – Pr<strong>of</strong>. R.G. Longoria<br />
Vehicle System Dynamics and Control<br />
X<br />
X<br />
Velocities in the local (body-fixed)<br />
reference frame are transformed<br />
into the inertial frame by the<br />
rotation matrix,<br />
or, specifically, qɺ = R( ψ ) ⋅qɺ<br />
I<br />
q<br />
I<br />
⎡ X ⎤<br />
=<br />
⎢<br />
Y<br />
⎥<br />
⎢ ⎥<br />
⎢⎣ ψ ⎥⎦<br />
⎡ cosψ sinψ 0⎤<br />
R(<br />
ψ ) =<br />
⎢<br />
−sinψ<br />
cosψ 0<br />
⎥<br />
⎢ ⎥<br />
⎢⎣ 0 0 1⎥⎦<br />
Inverting, we arrive at the velocities in the global reference<br />
frame,<br />
⎡ Xɺ ⎤ ⎡U ⎤ ⎡cosψ ⎢ ⎥<br />
qɺ I = Yɺ ⎢<br />
V<br />
⎥<br />
( ψ )<br />
⎢<br />
⎢ ⎥ =<br />
⎢ ⎥<br />
= Ψ ⋅ qɺ<br />
=<br />
⎢<br />
sinψ ⎢ψ ⎥<br />
⎣<br />
ɺ<br />
⎦<br />
⎢⎣ Ω⎥⎦<br />
⎢⎣ 0<br />
−sinψ<br />
cosψ 0<br />
0⎤<br />
⎡ vx<br />
⎤<br />
0<br />
⎥ ⎢<br />
v<br />
⎥<br />
⎥ ⎢ y ⎥<br />
1⎥⎦<br />
⎢⎣ ω ⎥ z ⎦<br />
qɺ<br />
I<br />
⎡ Rw l2Rw ⎤<br />
⎢ ( ω1 + ω2)cos ψ − ( ω1 −ω2<br />
)sinψ<br />
2<br />
B<br />
⎥<br />
⎡Xɺ ⎤ ⎢ ⎥<br />
⎢ ⎥ Rw l2Rw = Yɺ<br />
⎢ ( ω1 ω2)sin ψ ( ω1 ω2)cos ψ ⎥<br />
⎢ ⎥ = + + −<br />
⎢ 2<br />
B<br />
⎥<br />
⎢ψ ⎥<br />
⎣<br />
ɺ<br />
⎦ ⎢ ⎥<br />
⎢<br />
Rw<br />
( ω1 −ω2<br />
)<br />
⎥<br />
⎢⎣ B<br />
⎥⎦<br />
<strong>Department</strong> <strong>of</strong> <strong>Mechanical</strong> Engineering<br />
The University <strong>of</strong> Texas at Austin