MILP reformulation of the multi-echelon stochastic inventory system ...
MILP reformulation of the multi-echelon stochastic inventory system ...
MILP reformulation of the multi-echelon stochastic inventory system ...
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>MILP</strong> <strong>reformulation</strong> <strong>of</strong> <strong>the</strong> <strong>multi</strong>-<strong>echelon</strong><strong>stochastic</strong> <strong>inventory</strong> <strong>system</strong> with uncertaindemandsAxel NybergÅbo Akademi UniversityIgnacio E. Grossmann ∗Dept. <strong>of</strong> Chemical Engineering, Carnegie Mellon University, Pittsburgh,USATapio WesterlundÅbo Akademi UniversityJuly 13, 20121 IntroductionIn this article we present an effective mixed-integer linear programming (<strong>MILP</strong>)formulation for design <strong>of</strong> a <strong>multi</strong>-<strong>echelon</strong> <strong>stochastic</strong> <strong>inventory</strong> <strong>system</strong> with uncertaincustomer demands. In You and Grossmann [2010] a three-<strong>echelon</strong> supplychain with inventories under uncertainty is presented. In that supply chain, <strong>the</strong>location <strong>of</strong> <strong>the</strong> plants and <strong>the</strong> customer demand zones (CDZ) are known. Potentialdistribution centers (DC) are given and <strong>the</strong> objective is to decide whichDCs to install in order to minimize total costs, which include transportationcost, installation cost as well as <strong>inventory</strong> holding costs. The formulation alsodetermines <strong>the</strong> service times for each DC, and what <strong>the</strong> size <strong>of</strong> <strong>the</strong> safety stockshould be at all DCs and CDZs. This model uses single sourcing, which is <strong>of</strong>ten<strong>the</strong> case for supply chains in industrial gases or specialty chemicals. That meansthat all DCs are served by only one plant and each CDZ is served by only oneDC. The detailed model can be found in You and Grossmann [2010].In this short note we first reformulate <strong>the</strong> mixed-integer nonlinear programming(MINLP) model presented in You and Grossmann [2010] and You andGrossmann [2011], using an alternative linearization scheme leading to a modelthat is significantly smaller in size, and tighter. We also present a successivepiecewise linear approximation with which we can solve <strong>the</strong> model with a sufficientlysmall optimality gap without <strong>the</strong> need <strong>of</strong> a global optimization solver.∗ Author to whom correspondence should be addresed: grossmann@cmu.edu1
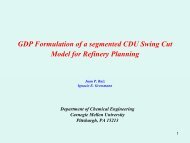
Figure 1: Network <strong>of</strong> <strong>multi</strong>ple plants, DCs and CDZs2 Model FormulationIn You and Grossmann [2010] <strong>the</strong> original MINLP model (P0) is stated as:Min : ∑ f j Y j + ∑ ∑ ∑A ijk X ij Z jk + ∑ ∑B jk Z jk (1)j∈J i∈I j∈J k∈K j∈J k∈K+ ∑ √∑q1 j N j σk 2Z jk + ∑ √q2 k Lk (2)j∈Jk∈K k∈Ks.t.N j ≥ ∑ i∈I(SI i + t1 ij )X ij − S j , ∀j, (3)L k ≥ ∑ j∈J(S j + t2 jk )Z jk − R k , ∀k, (4)∑X ij = Y j , ∀j, (5)i∈I∑Z jk = 1, ∀k, (6)j∈JZ jk ≤ Y j , ∀j, k, (7)X ij , Y j , Z jk ∈ {0, 1}, ∀i, j, k, (8)S j ≥ 0, N j ≥ 0, ∀j, (9)L k ≥ 0, ∀k, (10)with <strong>the</strong> following parameters(see section 9 for complete nomenclature):A ijk = (c1 ij χ + θ1 j t1 ij ) · µ k ,B jk = (g j χ + c2 jk χ + θ2 k t2 jk ) · µ k ,q1 j = λ1 j · h1 j ,q2 k = λ2 k · h2 k · σ k .In order to decrease <strong>the</strong> number <strong>of</strong> nonlinear terms, <strong>the</strong> authors linearize ina similar way as in Glover [1975], <strong>the</strong> bilinear terms in (P0) to obtain a newformulation, (P1), with fewer nonlinear constraints. In <strong>the</strong> objective function,2
whereA ij = (c1 ij χ + θ1 j t1 ij ), (25)is a new constant independent <strong>of</strong> k. According to Eq. (5) at most one <strong>of</strong> <strong>the</strong> X ijvariables in ∑ i A ijX ij can be nonzero. Thus, this term can now be linearizedusing (|I| + 1) · j new continuous variables, XZ ij , instead <strong>of</strong> 2 · |I| · |J| · |K| asin Eq. (2). Hence, for <strong>the</strong> linearization, <strong>the</strong> objective function is written as:∑ ∑A ij XZ ij , (26)j∈J i∈Iand <strong>the</strong> new constraints (instead <strong>of</strong> Eqs. (11) to (14)) as,XZ 0j + ∑ iXZ ij = ∑ kµ k Z jk ∀j, (27)XZ ij ≤ ∑ kµ k X ij ∀i, j, (28)XZ 0j ≤ ∑ kµ k (1 − Y j ) ∀j, (29)where <strong>the</strong> last variable Y j comes from Eq. (5).Since <strong>the</strong> objective is to minimize, and all variables are nonnegative we cansubstitute <strong>the</strong> N j in <strong>the</strong> objective function, with <strong>the</strong> right hand side ( ∑ i∈I (SI i+t1 ij )X ij −S j ) <strong>of</strong> Eq. (3). Instead <strong>of</strong> having bilinear terms between <strong>the</strong> continuousvariables N j and <strong>the</strong> binary variables Z jk , we can now linearize <strong>the</strong> expressionbelow as follows:( ∑ (SI i + t1 ij )X ij − S j ) · ( ∑ Z jk σk), 2 (30)i∈Ik∈Kwhich can be written as:( ∑ (SI i + t1 ij )X ij ) · ( ∑ Z jk σk) 2 − S j · ( ∑ Z jk σk). 2 (31)i∈Ik∈Kk∈KAgain, it can be noted that according to Eq. (5) at most one <strong>of</strong> <strong>the</strong> binaryX ij variables in <strong>the</strong> above equation can be nonzero. The first part <strong>of</strong> thisterm can <strong>the</strong>refore be linearized analogously as in Eqs. (27) to (29). Notethat <strong>the</strong> variables are exactly <strong>the</strong> same in <strong>the</strong> bilinear terms, and <strong>the</strong>refore <strong>the</strong>same linearizations would work in both cases if it were not for <strong>the</strong> constantspreceding <strong>the</strong> variables. However, we choose to write <strong>the</strong>se linearizations withnew continuous variables ZX ij as well since this formulation is tighter than <strong>the</strong>one presented in You and Grossmann [2010].ZX 0j + ∑ iZX ij = ∑ kσ 2 kZ jk ∀j, (32)ZX ij ≤ ∑ kσ 2 kx ij ∀i, j, (33)ZX 0j ≤ ∑ kσ 2 k(1 − Y j ) ∀j, (34)4
In <strong>the</strong> second half <strong>of</strong> Eq. (31), <strong>the</strong> bilinear terms in S j · ( ∑ k∈K Z jkσk 2 ) are againexactly <strong>the</strong> same as <strong>the</strong> ones already linearized in Eqs. (15) to (17). Therefore<strong>the</strong> bilinear terms are already defined earlier and we can write <strong>the</strong> expressionunder <strong>the</strong> first square root term as:∑S1 ij · ZX ij − ∑ σk 2 · SZ jk (35)k∈Ki∈I4 Reformulated modelBased on <strong>the</strong> linearizations in <strong>the</strong> previous section, <strong>the</strong> reformulated nonlinearmodel (R1) is as follows:∑Min : ∑ f j Y j + ∑ A ij XZ ij + ∑j∈J j∈J i∈I j∈J+ ∑ j∈Jq1 j√ ∑i∈IS1 ij · ZX ij − ∑ k∈K∑B jk Z jkk∈Kσ 2 k · SZ jk + ∑ k∈Kq2 k√Lk(36)s.t.L k ≥ ∑ j∈JSZ jk + t2 jk · Z jk − R k , ∀k, (37)∑X ij = Y j , ∀j, (38)i∈I∑Z jk = 1, ∀k, (39)j∈JZ jk ≤ Y j , ∀j, k, (40)XZ 0j + ∑ iXZ ij = ∑ kµ k Z jk ∀j, (41)XZ ij ≤ ∑ kµ k x ij ∀i, j, (42)XZ 0j ≤ ∑ kµ k (1 − Y j ) ∀j, (43)ZX 0j + ∑ iZX ij = ∑ kσ 2 kZ jk ∀j, (44)ZX ij ≤ ∑ kσ 2 kx ij ∀i, j, (45)ZX 0j ≤ ∑ kσ 2 k(1 − Y j ) ∀j, (46)SZ jk + SZ1 jk = S j , ∀j, k, (47)SZ1 jk ≤ (1 − Z jk ) · S U j , ∀j, k, (48)where all varialbes are ≥ 0. As shown later on in Table 3 this formulation issignificantly smaller in size as well as tighter than P1.5
5 Concave nonlinear termsIn <strong>the</strong> same manner as in You and Grossmann [2010] <strong>the</strong> only remaining nonlinearterms in R1 can be underestimated to obtain an <strong>MILP</strong> formulation (R2)<strong>of</strong> <strong>the</strong> model, which provides a good starting solution as well as a lower boundfor R1. Since we use <strong>the</strong> same variables and constraints, every feasible solution<strong>of</strong> <strong>the</strong> <strong>MILP</strong> R2 is also a feasible solution to <strong>the</strong> MINLP R1. Since weunderestimate R1, a valid lower bound for R2 is also a lower bound for R1.In You and Grossmann [2010] (P1) is relaxed in order to obtain <strong>the</strong> <strong>MILP</strong> P2,which is solved with CPLEX to obtain a good starting solution for <strong>the</strong> MINLP.You and Grossmann [2010] underestimate <strong>the</strong> nonlinear square root terms √ L kand √ NZV j with <strong>the</strong>ir respective secants√L kL UBkand√ NZV jNZV UBjas proposedby Soland [1971]. However, since one <strong>of</strong> <strong>the</strong> binary Z jk variables in Eq. (4) isnonzero, <strong>the</strong> lower bound for L k , when R k is a parameter becomes:L LBk= minj∈J {t2 jk − R k } ∀k. (49)In order to obtain a tighter underestimator, we use <strong>the</strong> following function, whichis <strong>the</strong> secant in <strong>the</strong> feasible region <strong>of</strong> L k :√ √L LBk− L UBk)((L LBk) − LUB k) L k +√L UBk√ √− ( L LBk− L UBk)((L LBk) − LUB k) LUBk (50)In Fig. 2 <strong>the</strong> difference is shown between underestimating <strong>the</strong> square root with<strong>the</strong> provided lower bounds versus underestimating with <strong>the</strong> lower bound 0. Thisis not <strong>the</strong> case when responsiveness R k is defined as a variable as in You andGrossmann [2011].√L kSecantEq. (50)√ L kL LBkL kL UBkFigure 2: Underestimators with lower bounds and with lower bound set to zero5.1 Piecewise linear approximationIn order to tighten <strong>the</strong> underestimations for <strong>the</strong> convex square root terms, weuse a sequential piecewise linear approximation approach. Since <strong>the</strong> <strong>MILP</strong> R2formulation gives a relatively small gap, even on larger instances, we introduce asuccessive piecewise linear approximation scheme in order to obtain sufficiently6
√ Lk√˜Lk√ L kL LBkL ∗ k 2L ∗ k 3L UBkL kFigure 3: Intervals with <strong>the</strong> sequential approach after a few iterationssmall gaps. We use <strong>the</strong> δ−formulation presented in Dantzig [1963] and whosetightness has been studied by Padberg [2000]. Since <strong>the</strong>re are |J| + |K| squareroot terms in <strong>the</strong> model, it is not a good idea to add too many intervals persquare root term. Therefore, we solve <strong>the</strong> underestimating <strong>MILP</strong> several times,and only partition <strong>the</strong> terms that are greater than zero in <strong>the</strong> underestimation.In <strong>the</strong> equations below, we show <strong>the</strong> piecewise linearization used for <strong>the</strong> term√Lk . In <strong>the</strong> model we also partition <strong>the</strong> second square root term analogously.L k = L LBk +√ √˜Lk = L LBk+N∑n=1N∑δ n , (51)n=1√L ∗ k n+1− √ L ∗ k nL ∗ k n+1− L ∗ k nδ n , (52)(L ∗ k n+1− L ∗ k n+)w n ≤ δ n ≤ (L ∗ k n+1− L ∗ k n)w n−1 , n = 2, . . . , N − 1, (53)(L ∗ k 2− L ∗ k 1)w 1 ≤ δ n ≤ L ∗ k 2− L ∗ k 1, (54)δ n ≤ (L UBk − L ∗ k N)w N−1 , (55)w n ∈ {0, 1}, n = 1, . . . , N − 1. (56)In <strong>the</strong> sequential approach, we start by solving <strong>the</strong> <strong>MILP</strong> model R2, <strong>the</strong>n weadd a grid point for each square root term that is larger than its lower bound.The <strong>MILP</strong> will <strong>the</strong>refore be exact in <strong>the</strong> solution found. We <strong>the</strong>n solve <strong>the</strong> modelagain with <strong>the</strong> new grid points and if we find a better solution we again add gridpoints at <strong>the</strong> new solution. Therefore, N, which is <strong>the</strong> number <strong>of</strong> grid points,will be different for all square root terms. Most <strong>of</strong> <strong>the</strong> terms will stay at zero, and<strong>the</strong>refore no new grid points or variables will be needed for those terms. Afterno improvement is found, <strong>the</strong> final <strong>MILP</strong> with <strong>the</strong> added grid points is solved toa predefined optimality gap. Since <strong>the</strong> piecewise underestimator is exact in <strong>the</strong>grid points, this approach can also be used to close <strong>the</strong> gap completely. This isa similar approach as <strong>the</strong> branch-and-refine method presented in Leyffer et al.[2008] and You et al. [2011].7
6 Computational ResultsIn this section, we present computational results on <strong>the</strong> same size instances as inYou and Grossmann [2010]. All computations in this paper are conducted on anAsus UX31E ultra book with a 2.8 GHz quad-core Intel processor and 4 Gb <strong>of</strong>ram. As a <strong>MILP</strong> solver we used CPLEX 12.3 with <strong>the</strong> default parameters. Allconstant values in <strong>the</strong> model are generated randomly with uniform distributionwithin predefined values. These values can be found in section 9. In order to beable to reproduce <strong>the</strong> runs, <strong>the</strong> default random seed in GAMS 23.7.3 was used.The difficulty <strong>of</strong> <strong>the</strong>se problems are strongly dependent on <strong>the</strong> values assignedto <strong>the</strong> different costs.P2R2|I| |J| |K| Bin. Vars. Con. Vars. Const. Bin. Vars. Cont. Vars. Const.2 20 20 460 2,480 5,300 460 980 1,8405 30 50 1,680 13,640 33,190 1,680 3470 658010 50 100 5,550 70,250 185,350 5,550 11,200 21,50020 50 100 6,050 120,250 335,350 6,050 12,200 22,4003 50 150 7,700 52,800 120,450 7,700 15,650 30,90015 100 200 21,600 300,300 1,040,700 21,600 43,400 83,800Table 1: Sizes <strong>of</strong> <strong>the</strong> old and reformulated modelsIn Table 1 <strong>the</strong> model sizes <strong>of</strong> P2 and R2 are compared. As can be seen, <strong>the</strong>difference is very large, especially for <strong>the</strong> larger instances. The root node values<strong>of</strong> <strong>the</strong> relaxed LP for <strong>the</strong> different formulations is shown in Table 2. As can beseen from Table 1 and Table 2, R2 is both smaller in size and at least as tightas P2.P2 R2|I| |J| |K| LB LB2 20 20 1,024,834 1,026,0545 30 50 2,087,756 2,087,75610 50 100 3,550,280 3,550,28020 50 100 3,234,617 3,234,6173 50 150 4,779,460 4,779,46015 100 200 6,468,441 6,468,441Table 2: Comparison <strong>of</strong> <strong>the</strong> tightness in <strong>the</strong> root node <strong>of</strong> <strong>the</strong> relaxed <strong>MILP</strong>s P2and R2In Table 3 <strong>the</strong> computational comparisons <strong>of</strong> <strong>the</strong> reformulated <strong>MILP</strong> (R2)and <strong>the</strong> original formulation (P2) are presented. As can be observed, P2 canonly be solved for <strong>the</strong> smallest instance within <strong>the</strong> time limit <strong>of</strong> 10 minutes. On<strong>the</strong> o<strong>the</strong>r hand for <strong>the</strong> new formulation R2, all instances are solved in a fewseconds. This comparison is made with <strong>the</strong> same secant function for <strong>the</strong> squareroot terms in both cases (i.e. zero lower bound in Eq. (50)). If <strong>the</strong> squareroot term in R2 is relaxed with <strong>the</strong> tighter underestimator shown in section 5,<strong>the</strong>n <strong>the</strong> optimal values <strong>of</strong> <strong>the</strong> <strong>MILP</strong> will be higher and <strong>the</strong>refore closer to <strong>the</strong>optimal value <strong>of</strong> R1. However <strong>the</strong> solution times for R2 would still be as fast asin Table 3.Table 4 shows <strong>the</strong> global optimum <strong>of</strong> <strong>the</strong> <strong>MILP</strong> R2, when underestimating<strong>the</strong> square root terms with <strong>the</strong> tighter lower bound in Eq. (50) and <strong>the</strong> correspondingcalculated feasible solution <strong>of</strong> <strong>the</strong> problem when evaluating <strong>the</strong> squareroot terms. Note that <strong>the</strong> optimal solutions for R2 are higher in Table 4 than inTable 3 for <strong>the</strong> same problems, while <strong>the</strong> solution times are roughly <strong>the</strong> same.8
P2R2|I| |J| |K| UB LB Gap Time(s) UB LB Gap Time(s)2 20 20 1,584,557 1,584,557 0.00% 1.27 1,584,557 1,584,557 0.00% 0.095 30 50 3,248,076 2,988,151 7.80% 600 3,169,880 3,169,880 0.00% 0.5810 50 100 6,893,324 3,569,929 48.20% 600 5,173,888 5,173,888 0.00% 4.1820 50 100 5,969,190 3,245,514 45.63% 600 4,602,706 4,602,706 0.00% 6.153 50 150 10,852,632 5,009,423 53.84% 600 7,151,942 7,151,942 0.00% 2.9215 100 200 54,755,897 6,407,108 88.30% 600 8,816,596 8,816,596 0.00% 23.4Table 3: Comparison <strong>of</strong> <strong>the</strong> performance <strong>of</strong> <strong>the</strong> <strong>MILP</strong>s P2 and R2, with a timelimit <strong>of</strong> 600 seconds|I| |J| |K| <strong>MILP</strong> (R2) MINLP (R1) Gap Time(s)2 20 20 1,708,930 1,783,540 4.18% 0.095 30 50 3,538,980 3,770,404 6.14% 0.6710 50 100 5,862,307 6,215,596 5.68% 4.7420 50 100 5,294,980 5,396,136 1.87% 6.863 50 150 8,161,606 8,479,354 3.75% 1.6515 100 200 10,318,630 10,727,860 3.81% 28.2Table 4: Gap between <strong>the</strong> optimal solution <strong>of</strong> R2 and <strong>the</strong> calculated feasibleMINLP solutionIn Table 5 solution times for <strong>the</strong> sequential piecewise approach presented insection 5.1 are shown. Even <strong>the</strong> larger instances can be solved within reasonablecomputational time. However, <strong>the</strong> solution times for different instances with <strong>the</strong>same size, can be completely different. This formulation is strongly dependenton <strong>the</strong> values <strong>of</strong> <strong>the</strong> parameters. This is also why <strong>the</strong> solution time is longerfor <strong>the</strong> third instance in Table 5 than for <strong>the</strong> fourth, even though <strong>the</strong> fourthinstance is larger in size.|I| |J| |K| Solution LB Gap Time(s)2 20 20 1,776,969 1,769,882 0.40% 0.945 30 50 3,728,020 3,704,300 0.64 % 24910 50 100 6,182,142 6,120,321 0.99% 9,04220 50 100 5,396,821 5,368,078 0.53% 1,0423 50 150 8,489,428 8,409,329 0.94% 41515 100 200 10,704,022 10,597,052 0.99% 10,840Table 5: Solutions for different size instances with <strong>the</strong> sequential piecewise approach7 ConclusionsIn this short note, we have showed that by reformulating <strong>the</strong> three-stage <strong>multi</strong><strong>echelon</strong><strong>inventory</strong> <strong>system</strong> with specific exact linearizations, we can solve largerproblems directly with an <strong>MILP</strong> solver without <strong>the</strong> need <strong>of</strong> decomposing <strong>the</strong>problem. The new formulation is significantly smaller in size, both in <strong>the</strong> number<strong>of</strong> variables as well as in <strong>the</strong> number <strong>of</strong> constraints. An <strong>MILP</strong> underestimation <strong>of</strong><strong>the</strong> problem can be solved very quickly in order to obtain a good feasible solutionfor <strong>the</strong> MINLP. The paper shows a simple sequential piecewise approximationscheme that can be used to solve <strong>the</strong> problem within a desired optimality gap.9
8 AcknowledgmentsThe financial supports from <strong>the</strong> Academy <strong>of</strong> Finland project 127992 as well as<strong>the</strong> Foundation <strong>of</strong> Åbo Akademi University, as part <strong>of</strong> <strong>the</strong> grant for <strong>the</strong> Center<strong>of</strong> Excellence in Optimization and Systems Engineering, are gratefully acknowledged.Financial support from <strong>the</strong> Center <strong>of</strong> Advanced Process Decision-making(CAPD) is also acknowledged. Axel Nyberg is grateful for his stay at <strong>the</strong> CAPD.9 NotationModelsP0, original MINLPP1, original reformulated MINLPP2, original underestimating <strong>MILP</strong>R1, reformulated P1R2, reformulated P2SetsI = set <strong>of</strong> suppliersJ = set <strong>of</strong> candidate DC locationsK = set <strong>of</strong> CDZsParametersBelow are <strong>the</strong> input parameters for <strong>the</strong> instances. All parameters are generatedrandomly with a uniform distribution. The data files used are available from<strong>the</strong> authors, upon request.c1 ij = t1 ij × U[0.05, 0.1], unit transportation cost between supplier and DCc2 jk = t2 jk × U[0.05, 0.1], unit transportation cost from DC to CDZf j = U[150, 000, 160, 000], fixed cost for installing a DC at location jg j = U[0.01, 0.1], annual variable cost coefficient for installing DC at location jh1 j = U[0.1, 1], unit <strong>inventory</strong> holding cost at DCh2 k = U[0.1, 1], unit <strong>inventory</strong> holding cost at CDZR k = 0, maximum guaranteed service time to customers at CDZ kSI i = U[1, 5](integers), guaranteed service time <strong>of</strong> plant it1 ij = U[1, 7](integers), order processing time <strong>of</strong> DC j if it is served by supplier it2 jk = U[1, 3](integers), order processing time <strong>of</strong> CDZ k if it is served by DC jµ k = U[75, 150], daily mean demand at CDZ kσ 2 k = U[0, 50], daily variance <strong>of</strong> demand at CDZ kχ = 365, days per yearθ1 ij = U[0.1, 1], annual unit cost <strong>of</strong> pipeline <strong>inventory</strong> from plant i to DC jθ2 jk = U[0.1, 1], annual unit cost <strong>of</strong> pipeline <strong>inventory</strong> from DC j to CDZ kλ1 j = 1.96, safety stock factor <strong>of</strong> DC jλ2 k = 1.96, safety stock factor <strong>of</strong> CDZ kBinary VariablesX ij = 1 if DC j is served by supplier iY j = 1 if a DC is installed at location j10
Z jk = 1 if <strong>the</strong> CDZ is served by DC jContinuous VariablesL k = net lead time <strong>of</strong> CDZ kN j = net lead time <strong>of</strong> DC jS j = guaranteed service time <strong>of</strong> DC j to <strong>the</strong> CDZsReferencesG.B. Dantzig. Linear Programming and Extensions. Princeton University Press,Princeton, NJ, 1963.Fred Glover. Improved linear integer programming formulations <strong>of</strong> nonlinear integerproblems. Management Science, 22(4):455–460, 1975. doi: 10.1287/mnsc.22.4.455.URL http://mansci.journal.informs.org/content/22/4/455.abstract.T.C. Koopmans and M.J. Beckmann. Assignment problems and location <strong>of</strong> economicactivities. Econometrica, 25:53–76, 1957.Sven Leyffer, Annick Sartenaer, and Emilie Wanufelle. Branch-and-refine for mixedintegernonconvex global optimization. Preprint ANL/MCS-P1547-0908, ArgonneNational Laboratory, 2008.Axel Nyberg and Tapio Westerlund. A new exact discrete linear <strong>reformulation</strong> <strong>of</strong><strong>the</strong> quadratic assignment problem. European Journal <strong>of</strong> Operational Research,220(2):314 – 319, 2012. ISSN 0377-2217. doi: 10.1016/j.ejor.2012.02.010. URLhttp://www.sciencedirect.com/science/article/pii/S0377221712001270.Manfred Padberg. Approximating separable nonlinear functions viamixed zero-one programs. Operations Research Letters, 27(1):1 – 5,2000. ISSN 0167-6377. doi: 10.1016/S0167-6377(00)00028-6. URLhttp://www.sciencedirect.com/science/article/pii/S0167637700000286.Richard M. Soland. An algorithm for separable nonconvex programming problemsii: Nonconvex constraints. Management Science, 17(11):759–773, July 1971. ISSN00251909. URL http://www.jstor.org/stable/2629317.Fengqi You and Ignacio E. Grossmann. Integrated <strong>multi</strong>-<strong>echelon</strong> supply chain designwith inventories under uncertainty: Minlp models, computational strategies.AIChE Journal, 56(2):419–440, 2010. ISSN 1547-5905. doi: 10.1002/aic.12010. URLhttp://dx.doi.org/10.1002/aic.12010.Fengqi You and Ignacio E. Grossmann. Balancing responsiveness and economicsin process supply chain design with <strong>multi</strong>-<strong>echelon</strong> <strong>stochastic</strong> <strong>inventory</strong>. AIChEJournal, 57(1):178–192, 2011. ISSN 1547-5905. doi: 10.1002/aic.12244. URLhttp://dx.doi.org/10.1002/aic.12244.Fengqi You, Jose M. Pinto, Ignacio E. Grossmann, and Larry Megan. Optimaldistribution-<strong>inventory</strong> planning <strong>of</strong> industrial gases. ii. minlp modelsand algorithms for <strong>stochastic</strong> cases. Industrial & Engineering ChemistryResearch, 50(5):2928–2945, 2011. doi: 10.1021/ie101758u. URLhttp://pubs.acs.org/doi/abs/10.1021/ie101758u.11