A Wheeling-Hopping Combination Scout Robot
A Wheeling-Hopping Combination Scout Robot
A Wheeling-Hopping Combination Scout Robot

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
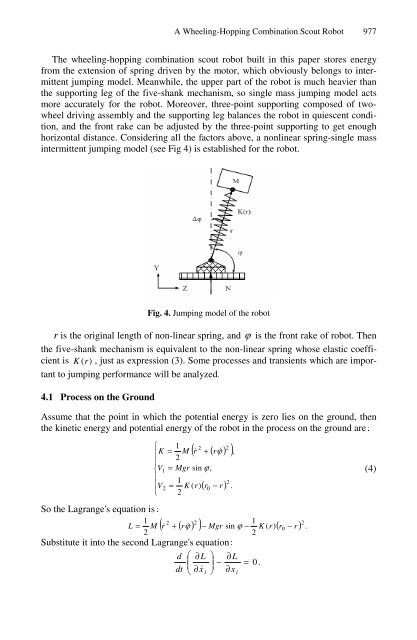
A <strong>Wheeling</strong>-<strong>Hopping</strong> <strong>Combination</strong> <strong>Scout</strong> <strong>Robot</strong> 977The wheeling-hopping combination scout robot built in this paper stores energyfrom the extension of spring driven by the motor, which obviously belongs to intermittentjumping model. Meanwhile, the upper part of the robot is much heavier thanthe supporting leg of the five-shank mechanism, so single mass jumping model actsmore accurately for the robot. Moreover, three-point supporting composed of twowheeldriving assembly and the supporting leg balances the robot in quiescent condition,and the front rake can be adjusted by the three-point supporting to get enoughhorizontal distance. Considering all the factors above, a nonlinear spring-single massintermittent jumping model (see Fig 4) is established for the robot.Fig. 4. Jumping model of the robotr is the original length of non-linear spring, and ϕ is the front rake of robot. Thenthe five-shank mechanism is equivalent to the non-linear spring whose elastic coefficientis K (r), just as expression (3). Some processes and transients which are importantto jumping performance will be analyzed.4.1 Process on the GroundAssume that the point in which the potential energy is zero lies on the ground, thenthe kinetic energy and potential energy of the robot in the process on the ground areSo the Lagrange's equation is2 2( r!+ ( rϕ!) ),$ 1! K = M2!# V1= Mgr sin ϕ ,! 1! V2= K ( r)0" 2( r − r )2.2 21( r!+ ( rϕ!) ) − Mgr sin − K ( r)( r − r ) .1 20L = Mϕ22Substitute it into the second Lagrange's equationd * ∂L' ∂L( %− = 0.dt ) ∂x!i & ∂x i(4)