Balancing Inverted Pendulum by Angle Sensing Using Fuzzy Logic ...
Balancing Inverted Pendulum by Angle Sensing Using Fuzzy Logic ...
Balancing Inverted Pendulum by Angle Sensing Using Fuzzy Logic ...
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
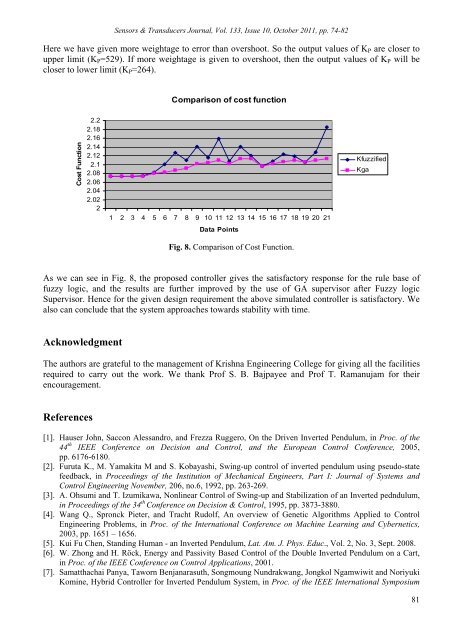
Sensors & Transducers Journal, Vol. 133, Issue 10, October 2011, pp. 74-82Here we have given more weightage to error than overshoot. So the output values of K P are closer toupper limit (K P =529). If more weightage is given to overshoot, then the output values of K P will becloser to lower limit (K P =264).Comparison of cost functionCost Function2.22.182.162.142.122.12.082.062.042.0221 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21Data PointsFig. 8. Comparison of Cost Function.KfuzzifiedKgaAs we can see in Fig. 8, the proposed controller gives the satisfactory response for the rule base offuzzy logic, and the results are further improved <strong>by</strong> the use of GA supervisor after <strong>Fuzzy</strong> logicSupervisor. Hence for the given design requirement the above simulated controller is satisfactory. Wealso can conclude that the system approaches towards stability with time.AcknowledgmentThe authors are grateful to the management of Krishna Engineering College for giving all the facilitiesrequired to carry out the work. We thank Prof S. B. Bajpayee and Prof T. Ramanujam for theirencouragement.References[1]. Hauser John, Saccon Alessandro, and Frezza Ruggero, On the Driven <strong>Inverted</strong> <strong>Pendulum</strong>, in Proc. of the44 th IEEE Conference on Decision and Control, and the European Control Conference, 2005,pp. 6176-6180.[2]. Furuta K., M. Yamakita M and S. Kobayashi, Swing-up control of inverted pendulum using pseudo-statefeedback, in Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems andControl Engineering November, 206, no.6, 1992, pp. 263-269.[3]. A. Ohsumi and T. Izumikawa, Nonlinear Control of Swing-up and Stabilization of an <strong>Inverted</strong> pedndulum,in Proceedings of the 34 th Conference on Decision & Control, 1995, pp. 3873-3880.[4]. Wang Q., Spronck Pieter, and Tracht Rudolf, An overview of Genetic Algorithms Applied to ControlEngineering Problems, in Proc. of the International Conference on Machine Learning and Cybernetics,2003, pp. 1651 – 1656.[5]. Kui Fu Chen, Standing Human - an <strong>Inverted</strong> <strong>Pendulum</strong>, Lat. Am. J. Phys. Educ., Vol. 2, No. 3, Sept. 2008.[6]. W. Zhong and H. Röck, Energy and Passivity Based Control of the Double <strong>Inverted</strong> <strong>Pendulum</strong> on a Cart,in Proc. of the IEEE Conference on Control Applications, 2001.[7]. Samatthachai Panya, Taworn Benjanarasuth, Songmoung Nundrakwang, Jongkol Ngamwiwit and NoriyukiKomine, Hybrid Controller for <strong>Inverted</strong> <strong>Pendulum</strong> System, in Proc. of the IEEE International Symposium81