Balancing Inverted Pendulum by Angle Sensing Using Fuzzy Logic ...
Balancing Inverted Pendulum by Angle Sensing Using Fuzzy Logic ...
Balancing Inverted Pendulum by Angle Sensing Using Fuzzy Logic ...
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
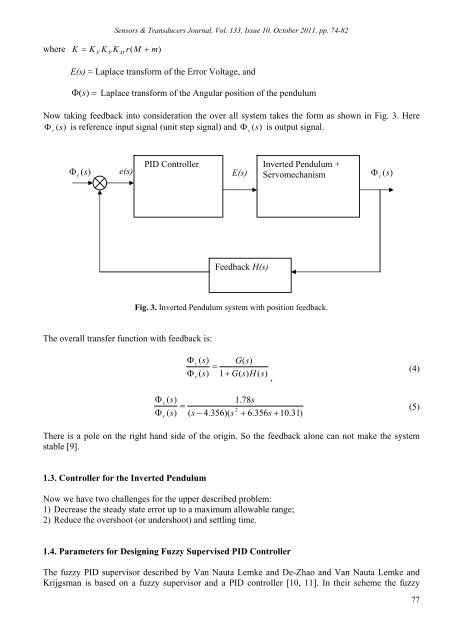
where K K K K r( M m)FPSensors & Transducers Journal, Vol. 133, Issue 10, October 2011, pp. 74-82ME(s) = Laplace transform of the Error Voltage, and (s) Laplace transform of the Angular position of the pendulumNow taking feedback into consideration the over all system takes the form as shown in Fig. 3. Herer(s) is reference input signal (unit step signal) and c(s)is output signal.PID Controller <strong>Inverted</strong> <strong>Pendulum</strong> + (s) e(s)rE(s) Servomechanism c(s)Feedback H(s)Fig. 3. <strong>Inverted</strong> <strong>Pendulum</strong> system with position feedback.The overall transfer function with feedback is: ( s)c ( s)rG(s)1G(s)H ( s),(4) ( s)c ( s)r1.78s2( s 4.356)( s 6.356s10.31)(5)There is a pole on the right hand side of the origin. So the feedback alone can not make the systemstable [9].1.3. Controller for the <strong>Inverted</strong> <strong>Pendulum</strong>Now we have two challenges for the upper described problem:1) Decrease the steady state error up to a maximum allowable range;2) Reduce the overshoot (or undershoot) and settling time.1.4. Parameters for Designing <strong>Fuzzy</strong> Supervised PID ControllerThe fuzzy PID supervisor described <strong>by</strong> Van Nauta Lemke and De-Zhao and Van Nauta Lemke andKrijgsman is based on a fuzzy supervisor and a PID controller [10, 11]. In their scheme the fuzzy77