Organization and Control of Autonomous Railway Convoys
Organization and Control of Autonomous Railway Convoys
Organization and Control of Autonomous Railway Convoys

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
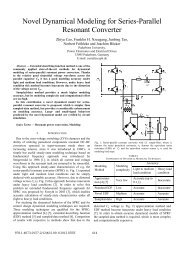
AVEC ’08employed to formally prove safety-critical properties.Systems with thous<strong>and</strong>s <strong>of</strong> elements <strong>and</strong> dynamicstructural changes as in the RailCab project do not allowthe specification <strong>and</strong> verification <strong>of</strong> the whole system.Instead compositional approaches have to be employed,where parts are precisely defined. Each system part isindividually specified <strong>and</strong> verified with respect to safetyconditions. The compositional approach then guaranteesthat the whole system is safe with respect to the safetyconditions when the system is correctly assembled fromthe base parts.The Mechatronic UML [7] is a modelling languagewhich supports the compositional specification <strong>of</strong>structure <strong>and</strong> hybrid (continuous/discrete) behaviour.Additionally, the specifications are compositionallychecked by the Uppaal model checker [8] whether theysatisfy safety-critical properties.In addition to previous work on convoys <strong>of</strong> only 2RailCabs [9], we extended the specifications to supportconvoys consisting <strong>of</strong> (a fixed number <strong>of</strong>) N RailCabs.In a convoy, one RailCab is appointed to coordinate theconvoy by periodically distributing reference values tothe other RailCabs for convoy control <strong>and</strong> dealing withjoining <strong>and</strong> leaving RailCabs.In [10], we presented a formal specification <strong>and</strong>compositional verification approach for collaborationswith an unknown number <strong>of</strong> participants. We build onthis foundation <strong>and</strong> derive the s<strong>of</strong>tware models from it.Fig. 1 shows the structure <strong>of</strong> the convoy operationpart <strong>of</strong> three RailCabs, the first one is the coordinator <strong>of</strong>the convoy <strong>and</strong>, in addition to the coordinatorcomponent, does also contain the component for drivingin a convoy. This component does receive referencevalues. These include how to behave in case <strong>of</strong> a hazard[9]. The coordinator component <strong>of</strong> the two othercomponents is currently not active. Both RailCabs alsoreceive periodically reference values for driving in theconvoy.to the coordinator.The coordinator checks whether it is possible (<strong>and</strong>beneficial for the convoy) that the additional RailCabjoins the convoy. If that is the case, the coordinatorcomputes new values concerning the maximal velocity<strong>and</strong> normal <strong>and</strong> maximal brake forces for each RailCabin the convoy as well as the potential convoy joinposition <strong>and</strong> velocity for the new RailCab. If the newRailCab agrees with these values, the coordinator relaysthem to all RailCabs in the convoy (including itself).Finally, the coordinator sends brake delay times to allRailCabs which enables a coordinated convoy brakingin case <strong>of</strong> a hazard.The messages are sent using data link layers whichmask value <strong>and</strong> omission faults <strong>of</strong> the employedwireless network [9].Fig. 2a convoyCommunication protocol concerning the use case: JoiningFig. 1S<strong>of</strong>tware structure <strong>of</strong> a convoy <strong>of</strong> three RailCabsWe identified the following use cases for theconvoy operation: (1) joining a convoy, (2) leaving aconvoy, <strong>and</strong> (3) changing the coordinator <strong>of</strong> a convoy.The communication protocols for these use cases mustbe specified for the individual RailCab as well as thecoordinator.The identified use cases are implemented bycommunication protocols between the participants. Fig.2 shows the communication between a single RailCab<strong>and</strong> an existing convoy <strong>of</strong> two RailCabs. The singleRailCab sends a request to join a convoy including itsmaximal velocity, <strong>and</strong> normal <strong>and</strong> maximal brake forcesThe components’ behaviours are specified inMatlab Stateflow. The generated code is executed onthe rapid prototyping hardware deployed on theRailCab.The negotiation <strong>of</strong> the parameters for convoy modeis done by evaluating the vehicle properties a motor,n <strong>and</strong>v max,n :Minn ∈ 1..N (1){ }{ }a motor = a motor,n , { }v = Min , { 1..N}max v max,nn ∈ (2)The defined parameters are binding for all convoyvehicles. The time delay T delay,n is different for eachRailCab. It depends on the vehicle mass m n in relationto the force <strong>of</strong> the emergency brake system F eb,n (whichis communicated as a eb,n ):T = T + T(3)delay, n+ 1 delay,n ∆ n+1,n∆Tvvn + 1 nn + 1,n = −(4)aeb,n+ 1 aeb,n



![[ ] Ï - Fachgebiet Leistungselektronik und Elektrische Antriebstechnik](https://img.yumpu.com/51151382/1/184x260/-i-fachgebiet-leistungselektronik-und-elektrische-antriebstechnik.jpg?quality=85)