


Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
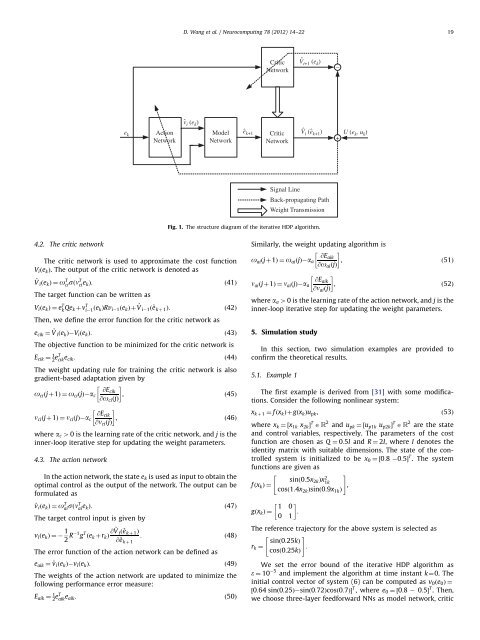
D. <strong>Wang</strong> et al. / <strong>Neurocomputing</strong> 78 (<strong>2012</strong>) 14–22 19CriticNetworkVˆi+1 (e k )_e kActionNetworkvˆi (e k )ModelNetworkeˆk+1 Critic Vˆi (eˆk+1 ) U (e k , u k )Network+Signal LineBack-propagating PathWeight TransmissionFig. 1. The structure diagram of the iterative HDP algorithm.4.2. The critic networkThe critic network is used to approximate the cost functionV i ðe k Þ. The output of the critic network is denoted as^V i ðe k Þ¼o T cisðn T ci e kÞ:ð41ÞThe target function can be written asV i ðe k Þ¼e T k Qe k þv T i 1 ðe kÞRv i 1 ðe k Þþ ^V i 1 ð^e k þ 1 Þ: ð42ÞThen, we define the error function for the critic network ase cik ¼ ^V i ðe k Þ V i ðe k Þ: ð43ÞThe objective function to be minimized for the critic network isE cik ¼ 1 2 eT cik e cik:ð44ÞThe weight updating rule for training the critic network is alsogradient-based adaptation given by @Eo ci ðjþ1Þ¼o ci ðjÞ a cikc , ð45Þ@o ci ðjÞ @En ci ðjþ1Þ¼n ci ðjÞ a cikc , ð46Þ@n ci ðjÞwhere a c 40 is the learning rate of the critic network, and j is theinner-loop iterative step for updating the weight parameters.4.3. The action networkIn the action network, the state e k is used as input to obtain theoptimal control as the output of the network. The output can beformulated as^v i ðe k Þ¼o T aisðn T ai e kÞ:ð47ÞThe target control input is given byv i ðe k Þ¼1 2 R 1 g T ðe k þr k Þ @ ^V i ð^e k þ 1 Þ: ð48Þ@^e k þ 1The error function of the action network can be defined ase aik ¼ ^v i ðe k Þ v i ðe k Þ: ð49ÞThe weights of the action network are updated to minimize thefollowing performance error measure:E aik ¼ 1 2 eT aik e aik:ð50ÞSimilarly, the weight updating algorithm is @Eo ai ðjþ1Þ¼o ai ðjÞ a aika , ð51Þ@o ai ðjÞ @En ai ðjþ1Þ¼n ai ðjÞ a aika , ð52Þ@n ai ðjÞwhere a a 40 is the learning rate of the action network, and j is theinner-loop iterative step for updating the weight parameters.5. Simulation studyIn this section, two simulation examples are provided toconfirm the theoretical results.5.1. Example 1The first example is derived from [31] with some modifications.Consider the following nonlinear system:x k þ 1 ¼ f ðx k Þþgðx k Þu pk ,ð53Þwhere x k ¼½x 1k x 2k Š T AR 2 and u pk ¼½u p1k u p2k Š T AR 2 are the stateand control variables, respectively. The parameters of the costfunction are chosen as Q ¼ 0:5I and R ¼ 2I, where I denotes theidentity matrix with suitable dimensions. The state of the controlledsystem is initialized to be x 0 ¼½0:8 0:5Š T . The systemfunctions are given as" #sinð0:5x 2k Þx 2 1kf ðx k Þ¼,cosð1:4x 2k Þsinð0:9x 1k Þgðx k Þ¼ 1 0 :0 1The reference trajectory for the above system is selected as"r k ¼sinð0:25kÞ#:cosð0:25kÞWe set the error bound of the iterative HDP algorithm ase ¼ 10 5 and implement the algorithm at time instant k¼0. Theinitial control vector of system (6) can be computed as v 0 ðe 0 Þ¼½0:64 sinð0:25Þ sinð0:72Þcosð0:7ÞŠ T , where e 0 ¼½0:8 0:5Š T . Then,we choose three-layer feedforward NNs as model network, critic






