Diameter of Opportunistic Mobile Networks - Paris Research ...
Diameter of Opportunistic Mobile Networks - Paris Research ...
Diameter of Opportunistic Mobile Networks - Paris Research ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3.1.2 Continuous-time modelIn the discrete-time model above, for any pair <strong>of</strong>nodes (u, v) the set <strong>of</strong> indices t such that edge (u, v)is in E t is a sequence <strong>of</strong> integers in N separated by geometricrandom variables. A natural generalization <strong>of</strong>the model to a continuous time setting is then to assumethat, for any pairs <strong>of</strong> nodes (u, v), the times <strong>of</strong>contact are separated by exponential random variables.In other words, this process <strong>of</strong> time instants constitutesa Poisson process.A random temporal network (in continuous time) is aprocess <strong>of</strong> graphs { G t = (V, E t ) | t ∈ R + } such that:• N (u,v) = { t | (u, v) ∈ E t } is a Poisson processwith rate λ/(N − 1).• Processes in the collection { N (u,v) | (u, v) } aremutually independent.This model may use either directed or undirected edges.3.1.3 Paths in long contact case/short contact caseA path from u to v in a temporal network is a sequenceu = u 0 ❀ t1 u 1 ❀ · · · ❀ t ku k = v such that:(i) (u i−1 , u i ) ∈ E ti for all i = 1, . . .,k,(ii) t i+1 ≥ t i for all i = 1, . . . , k.We assume that all contacts have a fixed durationthat is either one time slot (in the discrete time model)or negligible (in the continuous time model). To modelthe impact <strong>of</strong> a limited local bandwidth, or local latency,on the properties <strong>of</strong> paths, we introduce two cases.We define the long contact case as the model whereany number <strong>of</strong> edges may be used in a single time slot, asallowed by the definition <strong>of</strong> a path found above. In otherwords we assume that a single time slot is sufficientlylong to exchange across several contacts.On the contrary, we define the short contact case asthe model where only one contact may be used in asingle time slot. In other words, we require that allpaths verify, in addition to the conditions above:(ii ′ ) t i+1 ≥ t i + 1 for all i = 1, . . . , k.3.2 Phase transitionIn this section, we first prove a result on the expectednumber <strong>of</strong> paths between two nodes, when delay andhops are constrained. This result is then used to describea phase transition for the appearance <strong>of</strong> paths ina random temporal network.3.2.1 Expected number <strong>of</strong> paths with constraintsWe describe now our main analytical results, whichcharacterize the expected number <strong>of</strong> paths with constraintson both delay and hop-number. A source uand a destination v are fixed in advance and withoutloss <strong>of</strong> generality we assume that the packet is ready tobe sent at the source at time t = 0.Since we are interested in large networks, with a constantcontact rate per node, we let N go to infinity andlimit the time and the number <strong>of</strong> hops allowed in thepaths by a slowly increasing function <strong>of</strong> N.Lemma 1. Let us denote the maximum time t N andmaximum hops k N <strong>of</strong> a path allowed in the network.We assume that they are given as a function <strong>of</strong> N by:{tN = τ · ln(N),(1)k N = γ · t N = γ · τ · ln(N),where τ and γ are two positive constants.Let us denote by Π N the number <strong>of</strong> paths from u tov under the above constraints. Then, as N grows large- for short contacts, E[Π N ] = Θ−1+τ(γ(Nln(λ)+h(γ)))where h : x ∈ [0; 1] ↦→ −xln(x) − (1 − x)ln(1 − x).- for long contacts, E[Π N ] = Θ−1+τ(γ(Nln(λ)+g(γ)))where g : x ∈ [0; 1] ↦→ (1 + x)ln(1 + x) − xln(x).Pro<strong>of</strong>. This pro<strong>of</strong> follows from the memoryless property<strong>of</strong> geometric and exponential distributions. Wefirst estimate the probability <strong>of</strong> success <strong>of</strong> a path whosenodes are fixed in advance. The expectation is thenthis probability multiplied by the number <strong>of</strong> possiblecombinations. Stirling formula is used to complete theargument. It can be found in [12].We have, as a direct consequence <strong>of</strong> Lemma 1.Corollary 1. Under the assumption above we have,in the short contact case{E[ΠN ] → 0 if 1/τ > γ ln(λ) + h(γ)E[Π N ] → ∞ if 1/τ < γ ln(λ) + h(γ).The first result implies that, when 1/τ > γ ln(λ)+h(γ):P [ There exists a path with constraints (1) ] → 0All these results holds for the long contact case whenreplacing the function h by g.Pro<strong>of</strong>. The first results follows directly from theproperties <strong>of</strong> the expectation found above. The lastresult is a consequence from the Markov inequality:P [Π N ≥ 1] ≤ E[Π N ] .3.2.2 Phase transition in the short contact caseThe results from the previous section prove that, dependingon the values <strong>of</strong> the two constant numbers τand γ, as well as the contact rate λ, one <strong>of</strong> the two followingstatements holds: either there almost surely doesnot exist a path satisfying the logarithmic bound (1); orthe number <strong>of</strong> paths that satisfy these conditions growson average to infinity with N. Moreover, one can tell3
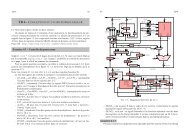
γ ln(λ) +h(γ)1.210.80.60.40.200λ = 1.5λ = 1.0λ = 0.50.2M = ln(1 + λ)γ = λ1+λ0.4γ0.60.8Figure 1: Phase transition (short contact case)which statement holds simply by comparing the values<strong>of</strong> 1/τ and γ ln(λ) + h(γ).This result might be interpreted as follows. Note thatthe short contact case implies γ ≤ 1. The functionγ ∈ [0; 1] ↦→ γ ln(λ) + h(γ) admits a maximum, that isgiven by M = ln(λ + 1) and this maximum is attainedwhen γ = λ1+λ. This is illustrated on Figure 1 where thevalue <strong>of</strong> this function <strong>of</strong> γ was plotted for three differentvalues <strong>of</strong> λ. We can deduce the following dichotomy:• If τ < 1/M = 1/ ln(1 + λ), then 1/τ is alwayslarger than γ ln(λ) + h(γ) for any value <strong>of</strong> γ. As aconsequence, almost surely there does not exist apath with delay less τ ln(N) when N is large.• If τ > 1/ ln(1+λ), then the super-critical conditionfrom Corollary 1 is verified for γ ∈ [γ 1 ; γ 2 ], anλinterval which contains1+λ. As a consequence,the average number <strong>of</strong> paths with delay τ ln(N)and γτ ln(N) hops is unbounded for large N,The delay-optimal path corresponds to the criticalvalue <strong>of</strong> τ for which a path is likely to be found. From aheuristic standpoint, we then expect the delay-optimalln(N)ln(1+λ)path to have delay t ≈ . When τ approachesthis critical value, the interval <strong>of</strong> possible values for γbecomes small, and centered around λ1+λ. Hence, we expectthat the delay optimal path has hop-number givenλ ln(N)by k ≈(1+λ)·ln(1+λ). As an example, when λ = 0.5, weexpect a delay growing with N as t ≈ 2.47 · ln(N) andwe expect a number <strong>of</strong> hops k ≈ 1.64 · ln(N).3.2.3 Phase transition in the long contact caseIn the long contact case, the expected number <strong>of</strong>paths with delay and hop constraints, for large N, becomeslarge if 1/τ < γ ln(λ) + g(γ). In contrast with1the short contact case, the properties <strong>of</strong> this function <strong>of</strong>γ change with the value <strong>of</strong> λ (see Figure 2). As a result,we look at the cases λ < 1 and λ > 1 separately.γ ln(λ) +g(γ)3.532.521.510.5000.5λ = 1.5λ = 1.0λ = 0.5M = − ln(1 − λ)1γγ = λ1−λ1.5Figure 2: Phase transition (long contact case)• When λ < 1, the result is very similar to the shortcontact case. The function <strong>of</strong> γ admits a maximumM = − ln(1 − λ), attained when γ = λ1−λ .Following the same heuristic as the short contactcase, we expect the delay-optimal path to haveln(N)2λln(N)−(1−λ)·ln(1−λ) hops.delay t ≈−ln(1−λ) and k ≈As an example, when λ = 0.5, we expect a delayt ≈ 1.69 · ln(N) and the same number <strong>of</strong> hops.• When λ > 1, we notice a difference with the shortcontact case, since the function <strong>of</strong> γ is increasingand unbounded. In that case, for any τ, even anarbitrary small constant, some paths exist with adelay less than τ ln(N).To compute the hop-numbers <strong>of</strong> these paths, weproceed as follows. Since 1/τ is large, γ shouldthen be sufficiently large to satisfy the condition<strong>of</strong> the corollary. The function <strong>of</strong> γ is then close toits asymptote γ ↦→ 1+γ ln(λ). We deduce that the1−τsmallest value <strong>of</strong> γ verifying the condition isτ ln(λ) ,hence k = γτ ln(N) given by k ≈ ln(N)/ln(λ).This last regime should not come as a surprise: in astatic random graph, there exists a phase transitionwhen λ approaches 1. In particular, when λ is greaterthan 1, there almost surely exists a unique connectedcomponent with a large size (see Theorem 5.4 p.109 in[6]). In our model, since the long contact case allowsone to use any number <strong>of</strong> hops during the same timeslot, this property implies that there does exist pathsfor any arbitrarily small τ. In other words, although4
the network is still changing with time, it is essentially“almost-simultaneously connected”.3.3 Impact <strong>of</strong> the contact rateWe have seen above that the value <strong>of</strong> the contactrate λ impacts qualitatively the phase transition in thelong contact case, as λ becomes larger than 1. Moregenerally, when λ is less than 1, it has a direct impacton the delay <strong>of</strong> the paths present in a random temporalnetwork. We note in particular that as λ gets small,the minimum value <strong>of</strong> τ for which a path may exist(respectively 1/ ln(1+λ) and −1/ ln(1−λ) for the shortand the long contact case) becomes large.In contrast with delay, the hop-number <strong>of</strong> a pathvaries little as λ changes. In particular, when λ becomessmall, the hop-number for the delay-optimal pathin both short and long contact cases no longer dependson λ and it converges to ln(N).kln(N)5432100.001long-contactshort-contact0.010.1λFigure 3: Hop-number <strong>of</strong> the delay-optimal pathseen as a function <strong>of</strong> the contact rateOne may think <strong>of</strong> the following explanation for thisresult: As λ decreases, the network is essentially completelydisconnected except occasionally for one or severaldisjoint pairs <strong>of</strong> nodes. Therefore, if we rescale timeby merging periodically a fixed number <strong>of</strong> time slots together,the network appears to be very similar (a fewdisjoint pairs <strong>of</strong> nodes) except for an appropriate scaling<strong>of</strong> the contact rate. As a consequence, decreasingλ linearly increases the time needed to create a path,but is unlikely to impact the actual hop-number <strong>of</strong> thispath. The analysis above makes this intuition rigorous.We summarize our results in Figure 3. The y-axisrepresents the estimate <strong>of</strong> the hop-number for the delayoptimalpath, normalized by ln(N). We see that in bothdense and sparse regimes, short and long contacts arein good agreement. They differ only near the critical110value λ = 1, where the long contact case has a singularity.This singularity is not likely to occur in practiceas bandwidth limits the hops in a single time slot.3.4 DiscussionsWe have studied the properties <strong>of</strong> random temporalnetworks, as they become large. We have shown thata source destination pair admits on average many forwardingpaths using a small number <strong>of</strong> hops and over ashort number <strong>of</strong> time-slots (i.e. both grow as the logarithm<strong>of</strong> the network size). Note that the delay <strong>of</strong> theoptimal paths depends heavily on the contact rate betweenthe nodes. On the other hand, the hop-number<strong>of</strong> these paths seems rather insensitive to changes inthe contact rate λ, with the only exception <strong>of</strong> the longcontactcase around the value λ = 1.Inspired by these results, one may compute the diameter<strong>of</strong> a network using the paths with an optimal delay,and deduce that temporal networks generally havea small diameter, for almost any contact rate. However,our model is based on several important simplificationsthat may impact in general the delay and hop-number<strong>of</strong> paths in opportunistic networks:• Homogeneity: We have assumed that nodes contactothers uniformly at random. In practice thisis not true as people tend to come close to eachother according to their habits and the communities<strong>of</strong> interest that they share.• Inter-contact time statistics: Since we assumethat contacts between nodes follow Bernoulli orPoisson Processes, the distribution <strong>of</strong> time betweentwo contacts <strong>of</strong> a pair is light tailed. Previous experimentshave shown that this assumption holdsonly at the timescale <strong>of</strong> days and weeks [1, 7].It is nevertheless possible to extend all <strong>of</strong> the resultswe have obtained so far to contacts describedby a renewal process with general inter-contacttime distribution with finite variance. We expectthis to have a major impact on the delay <strong>of</strong> a path,but a relatively small impact on hop-number.• Stationarity: This model does not include periodicdiurnal cycles in the variation <strong>of</strong> the contactrate that are typically found in human mobility.The network may change from a highly mobile anddense subset <strong>of</strong> contacts into a sparse and slowlyvarying subset <strong>of</strong> contacts. Again, we expect thiseffect to impact the delay <strong>of</strong> paths in temporalnetwork, but not much their hop-number.In the rest <strong>of</strong> this article, after having formally definedthe diameter <strong>of</strong> any temporal network, we estimate itsvalue for mobility traces where in general none <strong>of</strong> theseassumptions holds. Our goal is to demonstrate that thefundamental insight brought up by this simple modeltranslate in practice into similar qualitative trends.5
4. NETWORK DIAMETER DEFINITIONAND MEASUREMENT METHODIn this section, we first formalize our definition <strong>of</strong> networkdiameter. We then describe an algorithm to studyefficiently and exhaustively the properties <strong>of</strong> delay optimalpaths in opportunistic networks. This algorithmis instrumental to study the diameter found in largetraces, as done in the next section. It is one <strong>of</strong> thecontributions <strong>of</strong> this work.4.1 Definition <strong>of</strong> diameterThe diameter <strong>of</strong> a network is an upper bound on thenumber <strong>of</strong> intermediate hops needed to find at leastone path between any two nodes. What is essentiallynew in a temporal network is that one has to specifywhether this path should also satisfy a condition on itstime characteristics. Inspired by the results from theprevious section, we define the diameter such that werequire this path to be almost always optimal.For k ∈ N ∪ {∞}, and t ≥ 0 let Π(t, k) be 1 if thereexists a path that uses at most k hops and succeeds todeliver a packet within t seconds, let Π(t, k) be 0 otherwise.This variable depends on the source, destination,and starting time <strong>of</strong> the packet. For ε > 0, we definethe (1 − ε)-diameter as the integer k such that∀t ≥ 0 , P [Π(t, k) = 1] ≥ (1 − ε) · P [Π(t, ∞) = 1] ,and k is the minimum number that verifies it.This expression can be interpreted in two ways: in astochastic model <strong>of</strong> a stationary homogeneous network,like the one we studied in §3, the probability is chosenaccording to the distribution <strong>of</strong> the random variablesΠ(t, k) seen at any time between any two nodes. In amobility data set, we consider the empirical probabilitycombining uniformly observations for all sources, destinationsand starting times. In both case, this expressionstates that, for any delay-constraint, it is almostas likely to find a successful paths within k hops thanwith any more hops.One may think <strong>of</strong> this definition as an example <strong>of</strong>“competitive analysis” since the success ratio (i.e., theprobability to find a path within t seconds and at mostk hops) is not described in absolute term, but insteadis compared with an optimal strategy. It helps the definitionto adapt to variable environments. However,it requires one to know beforehand the performance <strong>of</strong>the delay-optimal paths at all time, which is why weformally describe in the rest <strong>of</strong> this section how theycan be extracted from traces.4.2 Paths in temporal networksEach data set may be seen as a temporal network.More precisely we represent it as a graph where edgesare all labeled with a time interval, and there may bemultiple edges between two nodes. A vertex representsa device. An edge from device u to device v, with label[t beg ; t end ], represents a contact, where u sees v duringthis time interval. The set <strong>of</strong> edges <strong>of</strong> this graph thereforeincludes all the contacts recorded by each device.Paths associated with a sequence <strong>of</strong> contacts:We intend to characterize and compute in an efficientway all the sequences <strong>of</strong> contacts that are available totransport a message in the network. Note that we allowsimultaneous contacts to be used, as in the long contactcase defined in §3.1. It is possible to include a positivetransmission delay in all these definitions, we expectthat the diameter will be smaller in that case.A sequence (e i = (v i−1 , v i , [t begi ; t endi ])) i=1,...,n <strong>of</strong> contactsis valid if it can be associated with a time respectingpath from v 0 to v n . In other words, it isvalid if there exists a non-decreasing sequence <strong>of</strong> timest 1 ≤ t 2 ≤ . . . ≤ t n such that t begi ≤ t i ≤ t endi for all i.An equivalent condition is given by:∀i = 1, . . .,n, t endi≥ maxj
made with a single contact, but sequences with multiplecontacts, like Figure 4 (a), might not verify EA ≤ LD.∞del(t)EA 4 > LD 4(v 1, v 2)EA 2(v 0, v 1)LD 2EA 2 LD 2EA 1 LD 1(v 0, v 1, v 2)LD EA(a)EA 1 LD 1EA LD(b)EA 3 < LD 3EA 2 = LD 2Figure 4: Two examples <strong>of</strong> concatenation4.3 Delay-optimal pathsSo far we have been describing a method to characterizewhen a sequence <strong>of</strong> contacts supports a timerespectingpath, and when we can concatenate them.However, computing all <strong>of</strong> them in general is very costly.In this section, we formally define paths that are optimalin terms <strong>of</strong> delay, and therefore are susceptible toimpact the diameter <strong>of</strong> the network. Later, we focus oncomputing only those paths.Delivery function: As a consequence <strong>of</strong> (ii) and(iii), for a message created at v 0 at time t, if t ≤ LDthen there exists a path associated with the sequence<strong>of</strong> contacts e, that transports this message and deliversit to v n at time max(t,EA). Otherwise, when t > LD,no path based on these contacts exists to transport themessage. The optimal delivery time <strong>of</strong> a message createdat time t, on a path using this sequence <strong>of</strong> contacts,is given by{ max(t,EA) if t ≤ LD,del(t) =∞ else.Similarly the optimal delivery time for any paths thatuse one <strong>of</strong> the sequences <strong>of</strong> contacts e 1 , . . .,e n is givenby the minimumdel(t)=min{max(t,EA k ),1 ≤ k ≤ n s.t. t ≤ LD k }(3)where, following a usual convention, the minimum <strong>of</strong> anempty set is taken equal to ∞.Optimal paths: We say that a time respecting path,leaving device v 0 at time t dep , arriving in device v n attime t arr , is strictly dominated in case there exists anotherpath from v 0 to v n with starting and ending timest ′ dep , t′ arr such that (t′ dep ≥ t dep and t ′ arr ≤ t arr), andif at least one <strong>of</strong> these inequalities is strict. A path issaid optimal if no other path strictly dominates it.According to (ii) and (iii) above, among the paths associatedwith a sequence <strong>of</strong> contacts with values (LD,EA)the optimal ones are the following: ifLD ≤ EA, this is thepath starting at time LD and arriving at time EA. Otherwise,when LD > EA, all paths that start and arrive atthe message generation time t ∈ [EA;LD] are optimal.EA 1 < LD 1LD 1LD 2LD 3LD 4time tFigure 5: Example <strong>of</strong> a delivery function, andthe corresponding pairs <strong>of</strong> values (LD i ,EA i ) i=1,2,3,4 .An example <strong>of</strong> delivery function is shown in Figure 5.Note that the value <strong>of</strong> the delivery function (y-axis) maybe infinite. Pairs (LD 1 ,EA 1 ) to (LD 3 ,EA 3 ) satisfy EA ≤LD, they may correspond to direct source-destinationcontacts, or sequence <strong>of</strong> contacts that all intersect atsome time; the fourth pair verifies LD 4 < EA 4 , hence itdoes not correspond to a contemporaneous connectivity.The message needs to leave the source before LD 4 , andremains for sometime in an intermediate device beforebeing delivered later at time EA 4 .4.4 Efficient computation <strong>of</strong> optimal pathsWe construct the set <strong>of</strong> optimal paths, and deliveryfunction for all source-destination pairs, as an inductionon the set <strong>of</strong> contacts in the traces. We representthe delivery function for a given source-destination pairby a list <strong>of</strong> pairs <strong>of</strong> value (LD,EA). The key element inthe computation is that only a subset <strong>of</strong> these pairs isneeded to characterize the function del. This subsetcorresponds to the number <strong>of</strong> discontinuities <strong>of</strong> the deliveryfunction, and the number <strong>of</strong> optimal paths thatcan be constructed with different contact sequences.We use the following observation: We assume thatthe values (LD k ,EA k ) k=1,...,n , used to compute the deliveryfunction as in (3), are increasing in their firstcoordinate. Then, as k = n, n − 1, . . ., we note that thek th pair can always be removed, leaving the functiondel unchanged, unless this pair verifies:EA k = min { EA l | l ≥ k } . (4)In other words, a list such that all pairs verify this conditiondescribes all optimal paths, and the functiondel,using a minimum amount <strong>of</strong> information.As a new contact is added to the graph, new sequences<strong>of</strong> contacts can be constructed thanks to theconcatenation rule (fact (iv) shown above). This createsa new set <strong>of</strong> values (LD,EA) to include in the list7
<strong>of</strong> different source-destination pairs. This inclusion canbe done so that only the values corresponding to anoptimal path are kept, following condition (4).We show that our method can also be used to identifyall paths that are optimal inside certain classes, forinstance the class <strong>of</strong> paths with at most k hops. Thiscan be done by computing all the optimal paths associatedwith sequences <strong>of</strong> at most k contacts, starting withk = 1, and using concatenation with edges on the rightto deduce the next step.Compared with previous generalized Dijkstra’s algorithm[5], this algorithm computes directly representation<strong>of</strong> paths for all starting times. That is essentialto have an exhaustive search for paths, and estimatethe diameter <strong>of</strong> a network at any time-scale. We foundalgorithm UW2 in [14] to be the closest to ours. Wehave introduced here an original specification througha concise representation <strong>of</strong> optimal paths which makesit feasible to analyze long traces with hundred thousands<strong>of</strong> contacts. Recently we have found that anotheralgorithm has been developed independently to studyminimum delay in DTN [18]. It works as follows: apacket is created for any beginning and end <strong>of</strong> contacts;a discrete event simulator is used to simulate flooding;the results are then merged using linear extrapolation.5. EMPIRICAL RESULTSIn this section we present first our data sets. Thenwe analyze the characteristics <strong>of</strong> optimal paths in opportunisticnetworks using the methodology describedin the previous section.5.1 Mobility data setsWe use four experimental data sets. Three have beencollected by the Haggle Project [1]. They include twoexperiments conducted during conferences, Infocom05,Infocom06, and one experiment conducted in Hong-Kong.The fourth data set has been collected by the MIT RealityMining Project [2]. Table 1 summarizes importantcharacteristics <strong>of</strong> these data sets.In the Haggle experiments, people were asked to carryan experimental device (i.e., an iMote) with them at alltimes. These devices log all contacts between experimentaldevices (i.e., called here internal contacts) usinga periodic scanning every t seconds, where t is calledgranularity. In addition, they log contacts with otherexternal Bluetooth devices (i.e., external contacts) thatthey meet opportunistically (e.g., cell phones, PDAs,laptops).In Infocom05, Infocom06 the experimental deviceswere distributed to students attending the conferencefor several consecutive days. The largest experiment isInfocom06 with 78 participants. By default we are presentinghere results for internal contacts only; resultswith internal and external contacts are very similar.In Hong-Kong, people carrying the experimental deviceswere chosen carefully in a Hong Kong bar to avoidsocial relationships between them. These people returnedthe iMote at the same bar a week later. As aconsequence, there are only few internal contacts, whichis why we are presenting here results with both internaland external contacts.Note that we may not collect all opportunistic encountersbetween participants <strong>of</strong> the experiment, because<strong>of</strong> the time between two scans, hardware limitations,s<strong>of</strong>tware parameters, and interference [13]. Forthe same reasons, it is also possible that some contactsappear shorter than they are. In addition, we do nothave access to the contact history <strong>of</strong> the external devicesand, as consequence, we miss some <strong>of</strong> the directcontacts between them as well. We examine the impact<strong>of</strong> this “sampling” effect in §6.The Reality Mining data set includes records fromBluetooth contacts and GSM base stations for a group<strong>of</strong> cell-phones distributed to 100 MIT students during 9months. We only show results from the Bluetooth dataset. We also made the same observations on the GSMdata set, as well as other publicly available data sets,including traces from campus WLAN in Dartmouth [4]and UCSD [11].5.2 Preliminary observationsFigure 6 shows the sequence <strong>of</strong> contacts with anyother device in the course <strong>of</strong> the experiment (for sixrepresentative participants (y-axis) <strong>of</strong> Infocom05). Thenext time the device will be in range <strong>of</strong> any other device(z-axis) is plotted as a function <strong>of</strong> time (x-axis). Thediagonal represents a period <strong>of</strong> uninterrupted contact.The steps correspond to period with no contact at all.Time <strong>of</strong> Next Contactinf12am12am12am12amnode 36403435393712amFigure 6: Time to contact any other device, forsix participants during Infocom05.Extended periods <strong>of</strong> high connectivity, where the deviceis always in reach <strong>of</strong> one or several devices alternate12amTime12am8
Experimental data set Infocom05 Infocom06 Hong-Kong Reality Mining BTDuration (days) 3 4 5 246Granularity (seconds) 120 120 120 300Number <strong>of</strong> experimental Devices 41 78 37 100Number <strong>of</strong> internal Contacts 22,459 182,951 560 54,667Rate <strong>of</strong> contact (only internal contacts) 1.10 1.70 8.6 ×10 −3 15 ×10 −3Number <strong>of</strong> external Devices 223 4,649 831 N/ANumber <strong>of</strong> external Contacts 1,173 11,630 2,507 N/ARate <strong>of</strong> contact (incl. external contacts) 1.39 2.53 98 ×10 −3 N/ATable 1: Characteristics <strong>of</strong> the four experimental data setswith periods <strong>of</strong> complete disconnection that are most<strong>of</strong>ten corresponding to night time.10.1Reality MiningHong KongInfocom05Infocom06pair in Hong Kong, the delivery function when pathswith different number <strong>of</strong> hops (i.e. intermediate relays)are used.Arrival Timeinf12amCCDF0.0112am12am12am0.00112am1e-041min 2min 10min1hour 3h 12hContact durationFigure 7: Distribution <strong>of</strong> contact duration12amsingle hophops = 234inf12am12am12am12am12amDeparture Time12amFigure 7 plots distributions <strong>of</strong> contact duration forthe four data sets. This figure shows that contact durationvary a lot in all traces (from a couple <strong>of</strong> minutes upto several hours). Above 75% <strong>of</strong> contacts (143,502 contacts)in Infocom06 are only one slot long (i.e. 2 minutes).This can be partly explained by the samplingeffect mentioned in §5.1. However we still find around0.4% (765 contacts) that are longer than one hour. Thishas two important consequences: First, a path computationtechnique should be able to handle contacts <strong>of</strong>different sizes represented as intervals <strong>of</strong> times, ratherthan relying on a discrete time representation <strong>of</strong> thedata set. Second, one should consider whether contactsthat are short are actually useful to carry data, andwhat are the implications <strong>of</strong> this limitation. We discussthese points further in §6.2.5.3 Properties <strong>of</strong> Delay-optimal PathsFollowing the methodology described earlier, we computethe sequence <strong>of</strong> optimal paths found between anysource and destination in the network, varying the maximumnumber <strong>of</strong> hops in a path between 1 and 4, andinfinity. Figure 8 shows, for a given source-destinationFigure 8: Example <strong>of</strong> a delivery function, fora given source-destination pair during Hong-Kong, for paths with various number <strong>of</strong> hops.In the example shown here, there is no path from thesource to the destination when using paths with lessthan 3 hops. When 4 hops can be used, the number <strong>of</strong>optimal paths increases to 5. We see on this figure thatthere is no optimal path with more than 4 hops, as thedelivery function is identical when the maximum hop isset to four or infinity. Similar results were obtained forInfocom05 and can be found in [12].5.3.1 Distribution <strong>of</strong> delayFrom the sequence <strong>of</strong> delay-optimal paths we deducethe delay obtained by the optimal path at all time. Wecombine all the observations <strong>of</strong> a trace uniformly amongall sources, destinations, and for every starting time (inseconds). We present this aggregated sample <strong>of</strong> observationsvia its empirical CDF in Figure 9, where themaximum hop-number varies between 1, 4 or 6, and infinity.Note that the value <strong>of</strong> the CDF for a given timet is equal to the probability to successfully find a path9
1110.10.10.1P[Delay < D ]0.01P[Delay < D ]0.01P[Delay < D ]0.010.001unlimited hops5 hops4 hops3 hops2 hopssingle hop0.001unlimited hops5 hops4 hops3 hops2 hopssingle hop0.001unlimited hops5 hops4 hops3 hops2 hopssingle hop2 min10 min1 hour 3 h 6 h1 day2 min 10 min1 hour 3 h 6 h 1 day2 min 10 min1 hour 3 h 6 hDelay DDelay DDelay D(a) Original data set(b) 10% <strong>of</strong> contacts remaining(c) 1% <strong>of</strong> contacts remainingFigure 10: Empirical CDF <strong>of</strong> minimum delay when contacts are removed randomly (Infocom06)diameter <strong>of</strong> the network, which remains under 5 hops.Moreover, as contacts are removed the improvement introducedby using several intermediate hops becomesless important at small time-scale, and remains importantat large time-scale. This confirms the intuitionthat improvement at small time scales is related to highcontact rate values (as seen in §5.3.1).observe that the diameter decreases with delay for highcontact rate. In contrast, the diameter increases withdelay when the contact rate is low. In between, we findan intermediate regime where the diameter might belarger for a narrow range <strong>of</strong> time. We conjecture this isbecause the network remains connected but lacks shortcutsbetween far-away nodes.6.2 Contact durationWe now remove each contact if it lasts less than t seconds,where t is a fixed threshold. Figure 11 presentsthe empirical CDF <strong>of</strong> the minimal delay after we removecontacts that last less than 2, 10 and 30 minutes(respectively 75%, 92% and 99% <strong>of</strong> contacts removed).Contacts that are less than 2 minutes are those with adevice seen during a single scan. When these contactsare removed, the success probability is divided by twoat any time scale, but all the results we have obtainedremain.Interestingly the diameter changes when we only keepcontacts that last more than 10 minutes. First notethat the probability to find a path with delay less than10 minutes remains above 5%, while it was 2% when wehad removed 90% <strong>of</strong> contacts randomly. In other words,keeping only the longest contacts maintain more availablepaths within a small delay. However this comes atthe cost <strong>of</strong> an increased diameter.One explanation for this phenomenon is that contactsare with different types: long contacts with less mobilenodes, or familiar people, and short contact where peopleare met that are belonging to any other part <strong>of</strong> thegroup. This result suggests that opportunistic schemeshave to take advantage <strong>of</strong> short contacts (less than 10minutes), not only because there are many, but alsobecause those may help to keep the diameter small.As a summary, Figure 12 plots the diameter (withconfidence level 99%) for each delay separately. As suggestedbefore by a comparison between data sets, we7. CONCLUSIONThis work establishes the existence <strong>of</strong> the so-called“small-world” phenomenon in opportunistic mobile networks.In particular, we have shown both analyticallyand empirically that the network diameter, that we defineas a general bound on the number <strong>of</strong> hops neededto successfully transmit a message under constraineddelay, is generally small compared to the number <strong>of</strong>devices in the network. From a theoretical perspective,we have proved that the diameter grows slowly with thenetwork size in a simple random case. We have also analyzedmultiple human contact traces and observed thatthe network diameter generally varies between 3 and6 hops, for networks containing from 40 up to a hundred<strong>of</strong> nodes. This result holds for sparse and densenetworks, and the diameter varies only a little whencontacts are removed.This result has important impacts on how to designforwarding algorithms in opportunistic networks. Inparticular, it indicates that messages can be discardedafter a few number <strong>of</strong> hops without occurring more thana marginal performance cost.We now describe some important future extensionsfor this work. First, note that Corollary 1 proves thatthe expected number <strong>of</strong> paths becomes large under supercriticalcondition, but it does not prove that a pathexist almost surely. Proving this last result is more difficult,and beyond the scope <strong>of</strong> this paper as the classicalconcentration method known as “second moment”(e.g. p.54 in [6]) does not apply. Second, this paper11
1110.10.10.1P[Delay < D ]P[Delay < D ]P[Delay < D ]0.010.010.010.0012 min10 min1 hourunlimited hops5 hops4 hops3 hops2 hopssingle hop3 h6 h1 day0.0012 min10 min1 hourunlimited hops7 hops5 hops4 hops3 hops2 hopssingle hop3 h6 h1 day0.0012 min10 min1 hourunlimited hops5 hops4 hops3 hops2 hopssingle hop3 h6 hDelay DDelay DDelay D(a) contact durations > 2mn(b) contact durations > 10mn(c) contact durations > 30mnFigure 11: Empirical CDF <strong>of</strong> minimum delay when short contacts are removed (Infocom06)Hops needed (sucess rate > 99%flooding)7654321010min1hourDelay DInfocom06Contacts>10mnContacts>30mnFigure 12: <strong>Diameter</strong> as a function <strong>of</strong> delayproves that short paths generally exist between any twonodes, but it does not indicate whether these paths canbe found efficiently by a distributed algorithm usinglocal information in the nodes. This topic has been addressedon static graphs with a more complex model [9],but the extension <strong>of</strong> these results to temporal networksremains an open problem. Third, we wish to study theimpact <strong>of</strong> the heterogeneity <strong>of</strong> contact rates among thenodes.8. REFERENCES[1] A. Chaintreau, P. Hui, J. Crowcr<strong>of</strong>t, C. Diot, J. Scott, andR. Gass. Impact <strong>of</strong> human mobility on opportunisticforwarding algorithms. IEEE Trans. Mob. Comp.,6(6):606–620, 2007.[2] N. Eagle and A. Pentland. Reality mining: Sensingcomplex social systems. Journal <strong>of</strong> Personal andUbiquitous Computing, 10(4):255–268, 2005.[3] M. Grossglauser and D. Tse. Mobility increases thecapacity <strong>of</strong> ad hoc wireless networks. IEEE/ACM Trans.on Net., 10(4):477–486, 2002.[4] T. Henderson, D. Kotz, and I. Abyzov. The changingusage <strong>of</strong> a mature campus-wide wireless network. In3h12hProceedings <strong>of</strong> ACM MobiCom, 2004.[5] S. Jain, K. Fall, and R. Patra. Routing in a delay tolerantnetwork. In Proceedings <strong>of</strong> ACM SIGCOMM, 2004.[6] S. Janson, T. ̷Luczak, and A. Ruciński. Random Graphs.John Wiley & Sons, 2000.[7] T. Karagiannis, J.-Y. Le Boudec, and M. Vojnovic. Powerlaw and exponential decay <strong>of</strong> inter contact times betweenmobile devices. Technical Report MSR-TR-2007-24,Micros<strong>of</strong>t <strong>Research</strong> Cambridge, 2007.[8] D. Kempe, J. Kleinberg, and A. Kumar. Connectivity andinference problems for temporal networks. In Proceedings<strong>of</strong> ACM STOC, 2000.[9] J. Kleinberg. The small-world phenomenon: Analgorithmic perspective. 2000.[10] J. Leskovec, J. Kleinberg, and C. Faloutsos. Graphs overtime: densification laws, shrinking diameters and possibleexplanations. In Proceeding <strong>of</strong> ACM SIGKDD, 2005.[11] M. McNett and G.M. Voelker. Access and mobility <strong>of</strong>wireless PDA users. SIGMOBILE Mob. Comput.Commun. Rev., 7(4):55–57, 2003.[12] A. Mtibaa, A. Chaintreau, L. Massoulié, and C. Diot. Thediameter <strong>of</strong> opportunistic mobile networks. TechnicalReport CR-PRL-2007-07-0001, Thomson, 2007.available online at http://www.thlab.net[13] E. Nordström, C. Diot, R. Gass, and P. Gunningberg.Experiences from measuring human mobility usingbluetooth inquiring devices. In Proceedings <strong>of</strong> WorkshopACM MobiEval, 2007.[14] A. Orda and R. Rom. Shortest-path and minimum-delayalgorithms in networks with time-dependent edge-length.J. ACM, 37(3):607–625, 1990.[15] M. Papadopouli and H. Schulzrinne. Seven degrees <strong>of</strong>separation in mobile ad hoc networks. In Proceedings <strong>of</strong>IEEE GLOBECOM, 2000.[16] V. Srinivasan, M. Motani, and W. Tsang Ooi. Analysisand implications <strong>of</strong> student contact patterns derived fromcampus schedules. In Proceedings <strong>of</strong> ACM MobiCom, 2006.[17] J. Su, A. Goel, and E. de Lara. An empirical evaluation <strong>of</strong>the student-net delay tolerant network. In Proceedings <strong>of</strong>IEEE Mobiquitous, 2006.[18] X. Zhang, J. Kurose, B. N. Levine, D. Towsley, andH. Zhang. Study <strong>of</strong> a bus-based disruption tolerantnetwork: Mobility modeling and impact on routing.Technical Report 07-12, UMass CMPSCI, 2007.[19] W. Zhao, M. Ammar, and E. Zegura. A message ferryingapproach for data delivery in sparse mobile ad hocnetworks. In Proceedings <strong>of</strong> ACM MobiHoc, 2004.12