pdf-preprint - Grzegorz Litak
pdf-preprint - Grzegorz Litak
pdf-preprint - Grzegorz Litak

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
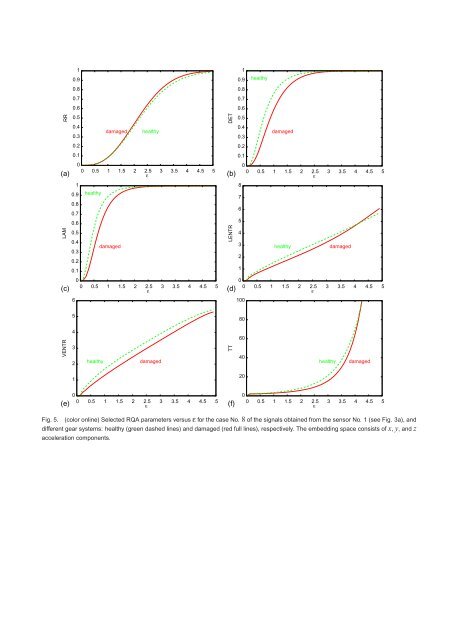
RR(a)LAM(c)10.90.80.70.60.50.4damaged healthy0.30.20.100 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5ε10.9 healthy0.80.70.60.50.4damaged0.30.20.100 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5ε6DET(b)LENTR(d)10.9 healthy0.80.70.60.50.4damaged0.30.20.100 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5ε876543healthydamaged2100 0.5 1 1.5 2 2.5ε3 3.5 4 4.5 5100580VENTR432healthydamagedTT6040healthydamaged120(e)00 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5ε(f)00 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5εFig. 5. (color online) Selected RQA parameters versus ε for the case No. 8 of the signals obtained from the sensor No. 1 (see Fig. 3a), anddifferent gear systems: healthy (green dashed lines) and damaged (red full lines), respectively. The embedding space consists of x, y, and zacceleration components.