Recapitulation - Σχολή Μηχανολόγων Μηχανικών Ε.Μ.Π.
Recapitulation - Σχολή Μηχανολόγων Μηχανικών Ε.Μ.Π.
Recapitulation - Σχολή Μηχανολόγων Μηχανικών Ε.Μ.Π.
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και Κατασκευών<strong>Μ</strong>ΗΧΑΝΙΣ<strong>Μ</strong>ΟΙ&<strong>Ε</strong>ΙΣΑΓΩΓΗ ΣΤΟ ΣΧ<strong>Ε</strong>∆ΙΑΣ<strong>Μ</strong>Ο <strong>Μ</strong>ΗΧΑΝΩΝ- 19.1 -
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και ΚατασκευώνCopyright © <strong>Ε</strong><strong>Μ</strong><strong>Π</strong> - <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και Κατασκευών - 2012.<strong>Μ</strong>ε επιφύλαξη παντός δικαιώµατος. All rights reserved.Απαγορεύεται η χρήση, αντιγραφή, αποθήκευση και διανοµή της παρούσης εργασίας, εξ ολοκλήρου ή τµήµατοςαυτής, για πάσης φύσεως εµπορικό ή επαγγελµατικό σκοπό. <strong>Ε</strong>πιτρέπεται η ανατύπωση, αποθήκευση και διανοµήγια σκοπό µη κερδοσκοπικό, εκπαιδευτικής ή ερευνητικής φύσεως, υπό την προϋπόθεση να αναφέρεται η πηγήπροέλευσης και να διατηρείται το παρόν µήνυµα.- 19.2 -
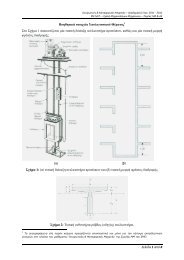
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και Κατασκευών- Σε µία σύνδεση ανωτέρας τάξεως δεν προσµετρούµε ως µέλος εκείνο το στοιχείο πουπαρεµβάλλεται µεταξύ των συνεργαζοµένων καµπυλών (επιφανειών). <strong>Μ</strong>ία τέτοια τυπικήπερίπτωση αποτελεί ένας τροχός, προσαρµοσµένος στο άκρο ενός µέλους και δυνάµενοςνα κινηθεί επί επίπεδης επιφάνειας. <strong>Ε</strong>ίτε ο τροχός περιστρέφεται γύρω από τον άξονά τουείτε ο τροχός είναι ‘µπλοκαρισµένος’, η κινηµατική κατάσταση του µηχανισµού στονοποίο ανήκει ο τροχός δεν µεταβάλλεται. Γι’ αυτό και δεν προσµετρούµε τον τροχό ωςµέλος, ούτε και τη δυνατότητα περιστροφής του γύρω από τον άξονά του ως Βαθµό<strong>Ε</strong>λευθερίας του µηχανισµού.<strong>Π</strong>αράδειγµαΓια την απεικονιζόµενη διάταξη:Α) Να αναγνωρισθούν τα είδη κινηµατικής σύζευξης σε κάθε µία από τις θέσεις σύνδεσης.Β) Να υπολογισθεί (αναλυτικά και αιτιολογηµένα) το πλήθος των βαθµών ελευθερίας.Γ) Να βρεθεί εάν πρόκειται για υπερστατική κατασκευή ή στερεό σώµα ή µηχανισµό.Σχήµα 1: <strong>Ε</strong>ξεταζόµενη διάταξηΟι θέσεις σύνδεσης είναι οι: Α, B, C, D.Θέση A: περιστροφική άρθρωση µεταξύ µέλους (ΑΒ) και βάσηςΘέση Β: περιστροφική άρθρωση µεταξύ µέλους (ΑΒ) και (ΒD) KAIπεριστροφική άρθρωση µεταξύ µέλους (ΑΒ) και (ΒC)(∆Ι<strong>Π</strong>ΛΗ άρθρωση)Θέση C: σύνδεση ανωτέρας τάξεως µεταξύ µέλους (BC) και βάσηςΘέση D: περιστροφική άρθρωση µεταξύ µέλους (ΒD) και εµβόλου D KAIπρισµατική άρθρωση µεταξύ εµβόλου (D) και βάσης(∆Ι<strong>Π</strong>ΛΗ άρθρωση)Για τον τύπο του Kutzbach:n = 3 µέλη (ΑΒ, BC, BD) + 1 βάση + 1 έµβολο = 5<strong>Π</strong>λήθος συνδέσεων µε (1-Β<strong>Ε</strong>): A,B,B,D,D, άρα f =5 1<strong>Π</strong>λήθος συνδέσεων µε (2-Β<strong>Ε</strong>) (ανωτέρας τάξεως): C, άρα f2=1<strong>Μ</strong>ε αντικατάσταση στον τύπο του Kutzbach, προκύπτει:F = 3 n −1 − 2 f − f = 3 5 −1 − 2× 5 − 1× 1 = 12 −10 − 1 = 1( ) ( )1 2Άρα, η εξεταζόµενο διάταξη διαθέτει F=1 Βαθµό <strong>Ε</strong>λευθερίας.<strong>Ε</strong>πειδή F>0, η εξεταζόµενη διάταξη είναι µηχανισµός.<strong>Π</strong>αρατήρηση:<strong>Ε</strong>άν προέκυπτε F=0, τότε η εξεταζόµενη διάταξη θα ήταν στερεό και ισοστατικό σώµα.<strong>Ε</strong>άν προέκυπτε F
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και ΚατασκευώνΑναπαράσταση θέσεως µε τη χρήση του οµογενούς µετασχηµατισµούΈστω το αδρανειακό σύστηµα αναφοράς ΣΣ{ I } και το τοπικό σύστηµα αναφοράς ΣΣ{ B }, τοοποίο προκύπτει από µία µεταφορά του ΣΣ{ I } και από µία στροφή του ΣΣ{ I }. <strong>Ε</strong>πίσης, έστωσηµείο ενδιαφέροντος P , µε γνωστό διάνυσµα θέσης r Bως προς το ΣΣ{ B }, και έστω ότιαναζητούµε την γραφή του διανύσµατος θέσης του σηµείου P ως προς το ΣΣ{ I }. Ισχύει: r = H rόπου ο τελεστής H I , B είναι ο πίνακας του οµογενούς µετασχηµατισµού.Στις 2∆, το διάνυσµα θέσης r Bενός σηµείου P ως προς το ΣΣ{ B } είναι:II , B ⎡ xB⎤rB= ⎢y ⎥⎣ B ⎦και ο πίνακας του οµογενούς µετασχηµατισµού είναι:HI , B⎡cosϑ−sinϑxo⎤=⎢sinϑcosϑy⎥⎢ o ⎥⎢⎣0 0 1 ⎥⎦Ο τετραγωνικός υποπίνακας από H I , B ( 1,1)έως και I , B ( 2, 2)ο υποπίνακας-στήλη από H ( ) έως και ( )BH είναι το µητρώο στροφής, ενώI , B 1,3 H I , B 2,3 είναι το διάνυσµα θέσης r o.Στις 3∆, ο πίνακας του οµογενή µετασχηµατισµού προκύπτει ίσος µε:⎡nx ox ax xo⎤⎢ny oy ay y⎥oH I , B = ⎢⎥⎢ nz oz az zo⎥⎢⎥⎣ 0 0 0 1 ⎦Ο τετραγωνικός υποπίνακας από H ( ) έως και ( )I B, 1,1⎡nx ox ax⎤R =⎢ny oy a⎥⎢ y ⎥⎢⎣nz oz a ⎥z ⎦ενώ ο υποπίνακας-στήλη από H ( ) έως και ( )I B, 1, 4Υπάρχουν τρεις ειδικές περιπτώσεις στροφής:• Στροφή περί του x − άξονα• Στροφή περί του y − άξονα⎡1 0 0 ⎤RI , B=⎢0 cosϑ sinϑ⎥⎢−⎥⎢⎣0 sinϑcosϑ⎥⎦RI , B⎡ cosϑ0 sinϑ⎤=⎢0 1 0⎥⎢ ⎥⎢⎣−sinϑ0 cosϑ⎥⎦H I , B 3,3 είναι το µητρώο στροφής:H I , B 3, 4 είναι το διάνυσµα θέσης r o.- 19.5 -
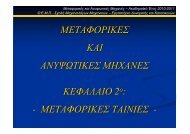
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και Κατασκευών• Στροφή περί του z − άξονα⎡cosϑ−sinϑ0⎤RI , B=⎢sinϑcosϑ0⎥⎢ ⎥⎢⎣0 0 1⎥⎦Σχετικά µε την σύνθεση οµογενών αναπαραστάσεων, ισχύει:HI , v= HI ,1H1,2 H2,3...Hv−2, v−1Hv−1,vόπου ΣΣ{ I } είναι το αδρανειακό σύστηµα αναφοράς και ΣΣ{ 1 } , ΣΣ{ 2 }, …, ΣΣ{ v } είναιτοπικά συστήµατα αναφοράς, ενώ ο οµογενής µετασχηµατισµός H I ,1 , περιγράφει τηµετάβαση από το ΣΣ{ I } στο ΣΣ{ 1 } , ο οµογενής µετασχηµατισµός H 1,2 , περιγράφει τηµετάβαση από το ΣΣ{ 1 } στο ΣΣ{ 2 } και εν γένει ο οµογενής µετασχηµατισµός H ( ν −1 ),νπεριγράφει τη µετάβαση από το ΣΣ{ v − 1}στο ΣΣ{ v } .<strong>Ε</strong>ξίσωση θέσεως αρθρωτού µηχανισµού<strong>Μ</strong>ε κατάλληλη χρήση του οµογενούς µετασχηµατισµού, είναι δυνατή η κατάστρωση τηςεξίσωσης θέσεως ενός αρθρωτού µηχανισµού. Τυπικά παραδείγµατα είναι οι κλειστέςκινηµατικές αλυσίδες µε 3 µέλη και µε 4 µέλη.(α)(β)Σχήµα 2: (α) Κλειστή κινηµατική αλυσίδα (ABCA) µε 3 µέλη και (β) κλειστή κινηµατικήαλυσίδα (ABCDA) µε 4 µέληΟι εξισώσεις θέσεως της κλειστής κινηµατικής αλυσίδας µε 3 µέλη (βλ. Σχήµα 2α) είναι:AC = AB cosϑ+ BC cosϑ( ) ( ) ( )( AB) sinϑ= ( BC)sin1 3ϑ1 3Οι εξισώσεις θέσεως της κλειστής κινηµατικής αλυσίδας µε 4 µέλη (βλ. Σχήµα 2β) είναι:l = l cos ϑ + ϑ + ϑ + l cos ϑ + ϑ + l cos ϑ( ) ( ) ( )( ϑ ϑ ϑ ) ( ϑ ϑ ) ( ϑ )4 3 1 2 3 2 1 2 1 10 = l sin + + + l sin + + l sin3 1 2 3 2 1 2 1 1Αναλυτικός (αλγεβρικός) υπολογισµός ταχύτητας<strong>Π</strong>ροκύπτει από τη χρονική παραγώγιση των εξισώσεων θέσεως του µηχανισµού.Αναλυτικός (αλγεβρικός) υπολογισµός επιτάχυνσης<strong>Π</strong>ροκύπτει από τη χρονική παραγώγιση των εξισώσεων ταχύτητας του µηχανισµού.- 19.6 -
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και Κατασκευών∆ιανυσµατικός υπολογισµός ταχύτηταςΈστω µηχανισµός και έστω αδρανειακό σύστηµα αναφοράς I , το οποίο επιλέγουµεαυθαίρετα. Έστω σηµείο Ρ του µηχανισµού και έστω τοπικό σύστηµα αναφοράς loc , τοοποίο, επίσης, επιλέγουµε αυθαίρετα. Σε έναν αρθρωτό µηχανισµό, είναι συνήθης πρακτική οορισµός ενός τοπικού συστήµατος συντεταγµένων σε κάθε µέλος του µηχανισµού. Ηταχύτητα του σηµείου P υπολογίζεται διανυσµατικά από την εξίσωση:υP, I= υloc, I+ υP, loc+ ω ⊗ rP , loc̃ ̃ ̃ ̃ ̃όπου: είναι η ταχύτητα του σηµείου Ρ ως προς το αδρανειακό σύστηµα αναφοράς IP,Iυ̃υ̃loc , I: είναι η γραµµική ταχύτητα του τοπικού συστήµατος αναφοράς loc ως προς τοαδρανειακό σύστηµα αναφοράς I (λόγω µεταφοράς του τοπικού συστήµατοςαναφοράς loc ως προς το αδρανειακό σύστηµα αναφοράς I )P,locυ̃ω̃ :r̃P , loc: είναι η γραµµική ταχύτητα του σηµείου Ρ ως προς το τοπικό σύστηµα αναφοράς loc(λόγω µετακίνησης του Ρ ως προς το τοπικό σύστηµα αναφοράς loc )είναι η γωνιακή ταχύτητα του σηµείου Ρ ως προς το τοπικό σύστηµα αναφοράς loc(λόγω περιστροφής του Ρ ως προς το τοπικό σύστηµα αναφοράς loc ): είναι το διάνυσµα θέσεως του σηµείου Ρ ως προς το τοπικό σύστηµα αναφοράς locr P ,: εφαπτοµενική συνιστώσα ταχύτητας̃ locω ⊗ ̃<strong>Π</strong>αρατήρηση: <strong>Ε</strong>άν το σηµείο ενδιαφέροντος Ρ ανήκει σε µέλος, το µήκος του οποίου δενµεταβάλλεται κατά τη διάρκεια της λειτουργίας του µηχανισµού, τότε ισχύει υP, loc= 0 . Σε̃ ̃αντίθετη περίπτωση, ισχύει υP, loc≠ 0 . Τυπικές περιπτώσεις δυνατότητας (όχι υποχρεωτικά)̃ ̃µεταβολής µήκους ενός µέλους µηχανισµού είναι ο τηλεσκοπικός βραχίονας και τοσυρµατόσχοινο ανάρτησης βάρους σε έναν γερανό (π.χ. κατά την ανύψωση βάρους).∆ιανυσµατικός υπολογισµός επιτάχυνσηςΓια το προαναφερθέν σηµείο Ρ, η επιτάχυνση υπολογίζεται διανυσµατικά από την εξίσωση:( r )aP, I= aloc, I+ aP, loc+ 2ω ⊗ υP, loc+ ̇ ω ⊗ rP , loc+ ω ⊗ ω ⊗P,loc̃ ̃ ̃ ̃ ̃ ̃ ̃ ̃ ̃ ̃όπου: είναι η επιτάχυνση του σηµείου Ρ ως προς το αδρανειακό σύστηµα αναφοράς IP,Iããloc , I: είναι η γραµµική επιτάχυνση του τοπικού συστήµατος αναφοράς loc ως προς τοαδρανειακό σύστηµα αναφοράς I (λόγω µεταφοράς του τοπικού συστήµατοςαναφοράς loc ως προς το αδρανειακό σύστηµα αναφοράς I )P,locã: είναι η γραµµική επιτάχυνση του σηµείου Ρ ως προς το τοπικό σύστηµα αναφοράς(λόγω µετακίνησης του Ρ ως προς το τοπικό σύστηµα αναφοράς loc )2ω ⊗υ̃P,loc: είναι η επιτάχυνση Coriolis̃̇ ω ⊗ r ̃ P , loc: είναι η εφαπτοµενική συνιστώσα της επιτάχυνσης̃ω ⊗ ( ω ⊗ r , ) : είναι η κάθετη συνιστώσα της επιτάχυνσης (κεντροµόλος)̃ ̃ ̃ P loc: είναι η γωνιακή ταχύτητα του σηµείου Ρ ως προς το τοπικό σύστηµα αναφοράς locω̃(λόγω περιστροφής του Ρ ως προς το τοπικό σύστηµα αναφοράς loc )- 19.7 -
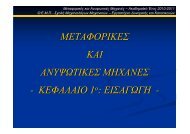
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και Κατασκευώνr̃P , loc: είναι το διάνυσµα θέσεως του σηµείου Ρ ως προς το τοπικό σύστηµα αναφοράς loc<strong>Π</strong>αρατήρηση: <strong>Ε</strong>άν το σηµείο ενδιαφέροντος Ρ ανήκει σε µέλος, το µήκος του οποίου δενµεταβάλλεται κατά τη διάρκεια της λειτουργίας του µηχανισµού, τότε ισχύει υP, loc= 0 , άρα̃ ̃µηδενίζεται και η επιτάχυνση Coriolis. Σε αντίθετη περίπτωση, ισχύει υP, loc≠ 0 και υπάρχει̃ ̃συνεισφορά από την επιτάχυνση Coriolis.<strong>Π</strong>αράδειγµα: <strong>Μ</strong>ηχανισµός Στροφάλου - ∆ιωστήρα – <strong>Ε</strong>µβόλουΓια τον µηχανισµό Στροφάλου - ∆ιωστήρα – <strong>Ε</strong>µβόλου (βλ. Σχήµα 3) στο xy-επίπεδο, ναβρεθούν:(Α) οι εξισώσεις θέσεως,(Β) οι εξισώσεις ταχύτητας (πρώτα αναλυτικά (αλγεβρικά) και κατόπιν διανυσµατικά),(Γ) οι εξισώσεις επιτάχυνσης (πρώτα αναλυτικά (αλγεβρικά) και κατόπιν διανυσµατικά) καινα αναγνωρισθούν οι επί µέρους όροι (π.χ. Coriolis, εφαπτοµενική, κοκ).<strong>Ε</strong>πίσης:(∆) να κατασκευασθούν τα διαγράµµατα ταχύτητας και επιτάχυνσης για το µέλος (ΑΒ).∆ίδονται: (AB), (BC): σταθερά µήκη, είσοδος: γωνία θ, έξοδος: γωνία φΣχήµα 3: <strong>Μ</strong>ηχανισµός Στροφάλου - ∆ιωστήρα – <strong>Ε</strong>µβόλου στο xy-επίπεδο (απεικονίζεται καιτο αδρανειακό σύστηµα αναφοράς x Ι O Ι y Ι )Υπολογισµός εξισώσεων θέσεωςΟ µηχανισµός Στροφάλου - ∆ιωστήρα – <strong>Ε</strong>µβόλου προκύπτει από την κλειστή κινηµατικήαλυσίδα µε 3 µέλη (βλ. Σχήµα 2α), εάν το τµήµα (AC) αφαιρεθεί και θεωρηθεί ως µεταβλητήαπόσταση u (βλ. Σχήµα 3). Συνεπώς, οι εξισώσεις θέσεως του εξεταζοµένου µηχανισµούπροκύπτουν µε κατάλληλη προσαρµογή των εξισώσεων θέσεως της κλειστής κινηµατικήςαλυσίδας µε 3 µέλη. <strong>Ε</strong>ιδικότερα, ισχύει:Οι εξισώσεις θέσεως της κλειστής κινηµατικής αλυσίδας µε 3 µέλη (βλ. Σχήµα 2α) είναι:( AC ) = ( AB) cosϑ1 + ( BC)cosϑ3(<strong>Ε</strong>1)AB sinϑ= BC sinϑ( ) ( )1 3Αντικαταστάσεις: (AB)->r, (BC) -> l, (AC)->u, θ 1 ->θ, θ 3 ->φΤελικά, οι ζητούµενες εξισώσεις θέσεως προκύπτουν ίσες µε:u = r cosθ+ l cosϕr sinθ= l sinϕΥπολογισµός εξισώσεων ταχύτητας (αλγεβρικά)(<strong>Ε</strong>2)- 19.8 -
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και Κατασκευών<strong>Π</strong>ροκύπτουν µε χρονική παραγώγιση των εξισώσεων (<strong>Ε</strong>1):u̇= −r ̇ θ sinϑ − l ̇ ϕ sinϕr ̇ θ cosθ = l ̇ ϕ cosϕ(<strong>Ε</strong>3)<strong>Π</strong>αρατήρηση: τα µήκη (AB), (BC) είναι σταθερά, άρα δεν συµµετέχουν στην παραγώγιση.Υπολογισµός εξισώσεων επιτάχυνσης (αλγεβρικά)<strong>Π</strong>ροκύπτουν µε χρονική παραγώγιση των εξισώσεων (<strong>Ε</strong>3):2 2u̇̇= −r ̇̇ θ sinϑ − r ̇ θ cosϑ − l ̇̇ ϕ sinϕ − l ̇ ϕ cosϕ2 2r ̇̇ θ cosϑ − r ̇ θ sinϑ − l ̇̇ ϕ cosϕ + l ̇ ϕ sinϕ= 0(<strong>Ε</strong>4)Υπολογισµός εξισώσεων ταχύτητας (διανυσµατικά)Για το σηµείο Β:Ορίζουµε τοπικό σύστηµα x 1 O 1 y 1 , (σύστηµα {loc}) παράλληλο ως προς το αδρανειακόσύστηµα αναφοράς και µε αρχή αξόνων στη θέση Α (βλ. Σχήµα 4).Σχήµα 4: Ορισµός τοπικού συστήµατος x 1 O 1 y 1Η ταχύτητα στο σηµείο Β, ως προς το αδρανειακό σύστηµα αναφοράς, ισούται µε:υB, I= υloc, I+ υB, loc+ ω ⊗ rB , loc(<strong>Ε</strong>5)̃ ̃ ̃ ̃ ̃όπουυloc, I= 0 (διότι η αρχή αξόνων του τοπικού συστήµατος συµπίπτει µε το ακλόνητο̃σηµείο Α)υB, loc= 0 (διότι η απόσταση του σηµείου Β από το σηµείο Α είναι σταθερή κατά τη̃λειτουργία του µηχανισµού, δηλαδή το σηµείο Β ούτε προσεγγίζει ούτεαποµακρύνεται από το σηµείο Α)ω = ⎡0 0 ̇ ⎣ θ ⎤̃⎦T[ θ θ ]διότι το σηµείο Β περιστρέφεται γύρω από το Α µε γωνιακή ταχύτηταθ̇ , άξονα περιστροφής κάθετο στο επίπεδο του χαρτιού (z-άξονας) καιφορά ανθωρολογιακήr,cos sin 0 TB loc= r r διάνυσµα θέσεως του σηµείου Β ως προς το τοπικό σύστηµα̃x 1 O 1 y 1 i j kω ⊗ rB , loc= 0 0 ̇ θ = i ( 0 − r ̇ θ sinθ ) − j ( 0 − r ̇ θ cosθ) + k ( 0 − 0)⇒̃ ̃r cosθr sinθ0- 19.9 -
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και Κατασκευών⎡−ṙ θ sinθ⎤⎢ ⎥⇒ ω ⊗ rB , loc= r ̇ ⎢ θ cosθ̃ ̃⎥⎢ 0 ⎥⎣ ⎦Αντικαθιστώντας όλα τα ανωτέρω στην εξίσωση (<strong>Ε</strong>5), προκύπτει:⎡−ṙ θ sinθ ⎤ ⎡−ṙ θ sinθ⎤⎢ ⎥ ⎢ ⎥υB, I= 0 + 0 + r ̇ θ cosθ ⇒ υB,I= r ̇⎢ ⎥ ⎢ θ cosθ̃̃⎥⎢ 0 ⎥ ⎢ 0 ⎥⎣ ⎦ ⎣ ⎦(<strong>Ε</strong>6)(<strong>Ε</strong>7)Για το σηµείο C:<strong>Ε</strong>παναλαµβάνουµε την ίδια διαδικασία, όπως και για το σηµείο Β. Ορίζουµε τοπικό σύστηµαx 2 O 2 y 2 , (σύστηµα {loc}) παράλληλο ως προς το αδρανειακό σύστηµα αναφοράς και µε αρχήαξόνων στη θέση Β (βλ. Σχήµα 5).Σχήµα 5: Ορισµός τοπικού συστήµατος x 2 O 2 y 2Η ταχύτητα στο σηµείο C, ως προς το αδρανειακό σύστηµα αναφοράς, ισούται µε:υC, I= υloc, I+ υC, loc+ ω ⊗ rC , loc(<strong>Ε</strong>8)̃ ̃ ̃ ̃ ̃όπουυloc, I= υA,I(διότι η αρχή αξόνων του τοπικού συστήµατος x 2 O 2 y 2 συµπίπτει µε το σηµείο̃ ̃Β, η ταχύτητα του οποίου υπολογίσθηκε στην προηγούµενη ενότητα)υC, loc= 0 (διότι η απόσταση του σηµείου C από το σηµείο B είναι σταθερή κατά τη̃λειτουργία του µηχανισµού, δηλαδή το σηµείο C ούτε προσεγγίζει ούτεαποµακρύνεται από το σηµείο B)[ 0 0 ϕ]ω = − ̇̃T[ ϕ ϕ ]διότι το σηµείο C περιστρέφεται γύρω από το B µε γωνιακή ταχύτηταϕ̇ , άξονα περιστροφής κάθετο στο επίπεδο του χαρτιού (z-άξονας) καιφορά ωρολογιακήr,cos sin 0 Tc loc= l −lδιάνυσµα θέσεως του σηµείου C ως προς το τοπικό σύστηµα̃x 2 O 2 y 2 i j kω ⊗ rC , loc= 0 0 − ̇ ϕ = i ( 0 − l ̇ ϕ sinϕ ) − j ( 0 + l ̇ ϕ cosϕ) + k ( 0 − 0)⇒̃ ̃l cosϕ−lsinϕ0⎡−l̇ ϕ sinϕ⎤⇒ ω ⊗ rC , loc=⎢−l̇ ϕ cosϕ⎥̃ ̃ ⎢ ⎥⎢⎣0 ⎥⎦(<strong>Ε</strong>9)- 19.10 -
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και ΚατασκευώνΑντικαθιστώντας όλα τα ανωτέρω στην εξίσωση (<strong>Ε</strong>8), προκύπτει:⎡−r ̇ θ sinθ ⎤ ⎡−l ̇ ϕ sinϕ ⎤ ⎡−r ̇ θ sinθ − l ̇ ϕ sinϕ⎤⎢ ⎥ ⎢ ⎥υC, I= 0 + r ̇ θ cosθ ⎢lϕ cosϕ ⎥⎢ ⎥ + − ̇ ⇒ υC,I= r ̇⎢ ⎥ ⎢ θ cosθ − l ̇ ϕ cosϕ⎥ (<strong>Ε</strong>10)̃̃⎢ 0 ⎥ ⎢⎣0 ⎥⎦⎢ 0 ⎥⎣ ⎦ ⎣ ⎦Από το Σχήµα 3, προκύπτει ότι:- η οριζόντια συνιστώσα της ταχύτητας στο σηµείο C ισούται µε u̇- η κατακόρυφη συνιστώσα της ταχύτητας στο σηµείο C είναι µηδενική, διότι στο σηµείοC η υπάρχουσα πρισµατική άρθρωση εµποδίζει κατακόρυφες µετακινήσεις<strong>Μ</strong>ε βάση αυτές τις παρατηρήσεις, η εξίσωση (<strong>Ε</strong>10) γράφεται και ως εξής:⎡−ṙ θ sinθ ⎤ ⎡−l̇ ϕ sinϕ⎤⎢ ⎥ u rθ sinθ lϕ sinϕυC,I0 rθ cosθ ⎢lϕ cosϕ⎥ ⎡ ⎤ ⎡−̇ − ⎤= + ̇̇⎢ ⎥ + − ̇⎢ ⎥⇒ ⎢ = ⎢ ⎥0⎥(<strong>Ε</strong>11)̃⎢rθ cosθ − lϕ cosϕ0 ⎥ ⎢ 0 ⎥⎣ ⎦̇⎣ ̇ ⎦⎣ ⎦ ⎣ ⎦<strong>Π</strong>αρατήρηση: Οι εξισώσεις (<strong>Ε</strong>3) και (<strong>Ε</strong>11) ταυτίζονται, ως αναµενόταν.Υπολογισµός εξισώσεων επιτάχυνσης (διανυσµατικά)Για το σηµείο Β:<strong>Μ</strong>ε βάση το ήδη ορισθέν τοπικό σύστηµα x 1 O 1 y 1 , η επιτάχυνση στο σηµείο Β, ως προς τοαδρανειακό σύστηµα αναφοράς, ισούται µε:( r )aB, I= aloc, I+ aB, loc+ 2ω ⊗ υB, loc+ ̇ ω ⊗ rB , loc+ ω ⊗ ω ⊗B,loc(<strong>Ε</strong>12)̃ ̃ ̃ ̃ ̃ ̃ ̃ ̃ ̃ ̃όπουaloc, I= 0 (διότι η αρχή αξόνων του τοπικού συστήµατος συµπίπτει µε το ακλόνητο̃ ̃σηµείο Α)aB, loc= 0 (διότι η απόσταση του σηµείου Β από το σηµείο Α είναι σταθερή κατά τη̃ ̃λειτουργία του µηχανισµού)2ω ⊗ υ B , loc= 0 η επιτάχυνση Coriolis είναι µηδενική διότι υB, loc= 0 (βλ. ενότητα για̃ ̃ ̃̃ταχύτητα στο σηµείο Β)[ θ θ ]r,cos sin 0 TB loc= r r διάνυσµα θέσεως του σηµείου Β ως προς το τοπικό σύστηµα̃x 1 O 1 y 1Tω = ⎡0 0 ̇ ⎣ θ ⎤̃⎦(βλ. ενότητα για ταχύτητα στο σηµείο Β)̇ ω ⊗ r ̃ B , loc: είναι η εφαπτοµενική συνιστώσα της επιτάχυνσης̃ i j k̇ ω ⊗ rB , loc= 0 0 ̇̇ θ = i ( 0 − r ̇̇ θ sinθ ) − j ( 0 − r ̇̇ θ cosθ) + k ( 0 − 0)⇒̃ ̃r cosθr sinθ0ω ⊗̃( ω r , ) B loc̃⊗ ̃̇̃⎡−ṙ̇ θ sinθ⎤⎢ ̇̇ ⎥⇒ ω ⊗ rB , loc= ⎢ rθ cosθ⎥̃⎢⎣: είναι η κάθετη συνιστώσα της επιτάχυνσης (κεντροµόλος)0⎥⎦(<strong>Ε</strong>13)- 19.11 -
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και Κατασκευών ⎡−r ̇ θ sinθ⎤ i j k⎢ ⎥ω ⊗( ω ⊗ rB , loc ) = ω ⊗ r ̇ θ cosθ = 0 0 ̇ θ ⇒̃ ̃ ̃ ̃⎢ ⎥⎢ 0 ⎥⎣ ⎦−ṙ θ sinθ r ̇ θ cosθ02 2⇒ ω ⊗( ω ⊗ rB , loc ) = i ( 0 − r ̇ θ cosθ ) − j ( 0 + r ̇ θ sinθ) + k ( 0 − 0)⇒̃ ̃ ̃2⎡−ṙ θ cosθ⎤⎢ 2 ⎥⇒ ω ⊗( ω ⊗ rB , loc ) = −ṙ ⎢ θ sinθ̃ ̃ ̃⎥⎢ 0 ⎥⎣ ⎦Αντικαθιστώντας όλα τα ανωτέρω στην εξίσωση (<strong>Ε</strong>12), προκύπτει:2 2⎡−r ̇̇ θ sinθ ⎤ ⎡−r ̇ θ cosθ ⎤ ⎡−r ̇̇ θ sinθ − r ̇ θ cosθ⎤⎢ ⎥ ⎢ 2 ⎥ ⎢ 2 ⎥aB, I= 0 + 0 + 0 + r ̇̇ θ cosθ + −r ̇ θ sinθ ⇒ aB,I= r ̇̇⎢ ⎥ ⎢ ⎥ ⎢ θ cosθ − r ̇ θ sinθ̃ ̃ ̃ ̃ ̃⎥⎢ 0 ⎥ ⎢ 0 ⎥ ⎢ 0 ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦(<strong>Ε</strong>14)(<strong>Ε</strong>15)Για το σηµείο Γ:<strong>Ε</strong>παναλαµβάνουµε την ίδια διαδικασία, όπως και για το σηµείο Β. <strong>Μ</strong>ε βάση το ήδη ορισθέντοπικό σύστηµα x 2 O 2 y 2 , η επιτάχυνση στο σηµείο C, ως προς το αδρανειακό σύστηµααναφοράς, ισούται µε:( r )aC , I= aloc, I+ aC , loc+ 2ω ⊗ υC, loc+ ̇ ω ⊗ rC , loc+ ω ⊗ ω ⊗C,loc(<strong>Ε</strong>16)̃ ̃ ̃ ̃ ̃ ̃ ̃ ̃ ̃ ̃όπουaloc, I= aB,I(διότι η αρχή αξόνων του τοπικού συστήµατος x 2 O 2 y 2 συµπίπτει µε το σηµείο̃ ̃Β, η επιτάχυνση του οποίου υπολογίσθηκε στην προηγούµενη ενότητα)aC, loc= 0 (διότι η απόσταση του σηµείου C από το σηµείο B είναι σταθερή κατά τη̃ ̃λειτουργία του µηχανισµού)2ω ⊗ υ C , loc= 0 η επιτάχυνση Coriolis είναι µηδενική διότι υC, loc= 0 (βλ. ενότητα για̃ ̃ ̃̃ταχύτητα στο σηµείο C)[ ϕ ϕ ]r,cos sin 0 Tc loc= l −lδιάνυσµα θέσεως του σηµείου C ως προς το τοπικό σύστηµα̃x 2 O 2 y 2Tω = [ 0 0 − ̇ ϕ](βλ. ενότητα για ταχύτητα στο σηµείο C)̃̇ ω ⊗ r ̃ C , loc: είναι η εφαπτοµενική συνιστώσα της επιτάχυνσης̃ i j k̇ ω ⊗ rC , loc= 0 0 − ̇̇ ϕ = i ( 0 − l ̇̇ ϕ sinϕ ) − j ( 0 + l ̇̇ ϕ cosϕ) + k ( 0 − 0)⇒̃ ̃l cosϕ−lsinϕ0ω ⊗̃( ω r , ) C loc⊗̃ ̃⎡−l̇̇ ϕ sinϕ⎤⇒ ̇ ω ⊗ rC , loc=⎢−l̇̇ ϕ cosϕ⎥̃ ̃ ⎢ ⎥⎢⎣0 ⎥⎦: είναι η κάθετη συνιστώσα της επιτάχυνσης (κεντροµόλος)(<strong>Ε</strong>17)- 19.12 -
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και Κατασκευών ⎡−l ̇ ϕ sinϕ⎤ i j kω ⊗ ( ω ⊗ rc , loc ) = ω ⊗⎢− l ̇ ϕ cosϕ ⎥= 0 0 − ̇ ϕ ⇒̃ ̃ ̃ ̃ ⎢ ⎥⎣⎢ 0 ⎦⎥ −l̇ ϕ sinϕ −l̇ ϕ cosϕ02 2⇒ ω ⊗ ( ω ⊗ rC , loc ) = i ( 0 − l ̇ ϕ cosϕ ) − j ( 0 − l ̇ ϕ sinϕ) + k ( 0 − 0)⇒̃ ̃ ̃2⎡−l̇ ϕ cosϕ⎤⎢ 2 ⎥⇒ ω ⊗ ( ω ⊗ rB , loc ) = ⎢ l ̇ ϕ sinϕ⎥(<strong>Ε</strong>18)̃ ̃ ̃⎢ 0 ⎥⎣ ⎦Αντικαθιστώντας όλα τα ανωτέρω στην εξίσωση (<strong>Ε</strong>16), προκύπτει:2 2⎡−r ̇̇ θ sinθ − r ̇ θ cosθ ⎤ ⎡−l ̇̇ ϕ sinϕ ⎤ ⎡−l̇ ϕ cosϕ⎤⎢ 2 ⎥ ⎢ 2 ⎥aC , I= r ̇̇ θ cosθ − r ̇ θ sinθ 0 0⎢lϕ cosϕ ⎥⎢ ⎥ + + + − ̇̇ + ⎢ l ̇⎢ ⎥ϕ sinϕ⎥ ⇒̃ ̃ ̃⎢ 0 ⎥ ⎢⎣ 0 ⎥⎦ ⎢ 0 ⎥⎣⎦⎣ ⎦2 2⎡−r ̇̇ θ sinθ − r ̇ θ cosθ − l ̇̇ ϕ sinϕ − l ̇ ϕ cosϕ⎤⎢2 2 ⎥⇒ aC , I= r ̇̇ θ cosθ − r ̇⎢ θ sinθ − l ̇̇ ϕ cosϕ + l ̇ ϕ sinϕ⎥(<strong>Ε</strong>19)̃⎢0⎥⎣⎦Σε συνέχεια των παρατηρήσεων επί του Σχήµατος 3, προκύπτει ότι:- η οριζόντια συνιστώσα της επιτάχυνσης στο σηµείο C ισούται µε u̇̇- η κατακόρυφη συνιστώσα της επιτάχυνσης στο σηµείο C είναι µηδενική, διότι στοσηµείο C η υπάρχουσα πρισµατική άρθρωση εµποδίζει κατακόρυφες µετακινήσεις<strong>Μ</strong>ε βάση αυτές τις παρατηρήσεις, η εξίσωση (<strong>Ε</strong>19) γράφεται και ως εξής:2 2⎡u̇̇ ⎤ ⎡−r ̇̇ θ sinθ − r ̇ θ cosθ − l ̇̇ ϕ sinϕ − l ̇ ϕ cosϕ⎤⎢ 2 20⎥ = ⎢⎥(<strong>Ε</strong>20)⎣ ⎦ r ̇̇ θ cosθ − r ̇⎣ θ sinθ − l ̇̇ ϕ cosϕ + l ̇ ϕ sinϕ⎦<strong>Π</strong>αρατήρηση: Οι εξισώσεις (<strong>Ε</strong>4) και (<strong>Ε</strong>20) ταυτίζονται, ως αναµενόταν.∆ιάγραµµα ταχύτητας και επιτάχυνσης για το µέλος (ΑΒ)Το σηµείο Α είναι ακλόνητο, άρα διαθέτει µηδενική ταχύτητα και επιτάχυνση.Από τον υπολογισµό της ταχύτητας στο σηµείο Β, προκύπτει ότι το σηµείο Β εµφανίζει µόνοεφαπτοµενική συνιστώσα ταχύτητας ίση µε⎡−ṙ θ sinθ⎤⎢ ⎥υB, I= ( υB,I ) = r ̇ θ cosθεϕαπτ ⎢ ⎥(<strong>Ε</strong>21)̃ ̃⎢ 0 ⎥⎣ ⎦Από τον υπολογισµό της επιτάχυνσης στο σηµείο Β, προκύπτει ότι το σηµείο Β εµφανίζειµόνο εφαπτοµενική συνιστώσα ταχύτητας ίση µε⎡−ṙ̇ θ sinθ⎤⎢ ⎥( aB,I ) = r ̇̇ θ cosθεϕαπτ ⎢ ⎥(<strong>Ε</strong>22)̃⎢ 0 ⎥⎣ ⎦και κάθετη (κεντροµόλο) συνιστώσα ταχύτητας ίση µε- 19.13 -
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και Κατασκευών2⎡−ṙ θ cosθ⎤⎢ 2 ⎥( aB,I ) = −ṙ θ sinθκεντροµ ⎢ ⎥(<strong>Ε</strong>23)̃⎢ 0 ⎥⎣ ⎦Βάσει αυτών των πληροφοριών, τα διαγράµµατα ταχύτητας και επιτάχυνσης είναι αυτά πουαπεικονίζονται στο Σχήµα 6.(α)(β)Σχήµα 6: ∆ιάγραµµα (α) ταχύτητας και (β) επιτάχυνσης για το µέλος (ΑΒ)Συντελεστής Αναλογίας (Mechanical Advantage)<strong>Μ</strong>ε τη βοήθεια των µηχανισµών, είναι δυνατός ο πολλαπλασιασµός ή υπο-πολλαπλασιασµόςενός εξωτερικά ασκουµένου αιτίου (δύναµης ή ροπής). Eάν F in είναι η ‘είσοδος’ (εξωτερικάασκούµενο αίτιο) σε έναν µηχανισµό και F out είναι η ‘έξοδος’ (το, ασκούµενο από τονµηχανισµό, αποτέλεσµα), τότε ο Συντελεστής Αναλογίας (Mechanical Advantage) ορίζεταιως:⎛ F ⎞out( MA) = ⎜ ⎟(<strong>Ε</strong>24)⎝ Fin⎠Για τον υπολογισµό του λόγου (<strong>Μ</strong>Α), είναι δυνατόν να χρησιµοποιηθεί η Αρχή ∆ιατήρησηςτης Ισχύος, η οποία ισχύει για συντηρητικά συστήµατα (δηλαδή για συστήµατα µε µηδενικέςαπώλειες). Σύµφωνα µε την εν λόγω αρχή, ισχύει:P = P(<strong>Ε</strong>25)inόπου Pinκαι Poutείναι η ισχύς ‘εισόδου’ και η ισχύς ‘εξόδου’ του µηχανισµού.Υπενθυµίζεται ότι στην περίπτωση περιστρεφόµενης κίνησης, η ισχύς ορίζεται ως:P = Mω(<strong>Ε</strong>26)όπου M είναι η αναπτυσσόµενη ροπή και ω είναι η αντίστοιχη γωνιακή ταχύτητα. <strong>Ε</strong>πίσης,στην περίπτωση ευθύγραµµης κίνησης, η ισχύς ορίζεται ως:P = Fiυ(<strong>Ε</strong>27)̃ ̃όπου είναι η αναπτυσσόµενη δύναµη, είναι η ταχύτητα του σηµείου εφαρµογής τηςF̃υ̃δύναµης , ενώ το σύµβολο i δηλώνει την πράξη του εσωτερικού γινοµένου.F̃<strong>Π</strong>αρατήρηση: Από την εξίσωση (<strong>Ε</strong>27) προκύπτει ότι σε µία δύναµη, η οποία κινεί το σηµείοεφαρµογής της κάθετα ως προς τη διεύθυνσή της, αντιστοιχεί µηδενική ισχύς.out- 19.14 -
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και Κατασκευών<strong>Ε</strong>νεργειακή Αρχή LagrangeΓια τη µελέτη ενός (οποιουδήποτε) µηχανισµού, χρειάζεται η καταγραφή των εξισώσεωνισορροπίας του. <strong>Π</strong>ρος τούτο, είναι δυνατόν να εφαρµόσουµε τον πρώτο νόµο του Νεύτωνα.Ωστόσο, σε πολυβάθµια δυναµικά συστήµατα, αυτή είναι µία διαδικασία αρκετά επίπονη καιδύσκολη. Αντί, λοιπόν, της Νευτώνειας προσέγγισης, προτιµούµε την ενεργειακή προσέγγισηκατά Lagrange, η οποία χαρακτηρίζεται από τρία σηµαντικά πλεονεκτήµατα:1. Αποτελεί την πλέον γενική ενεργειακή διατύπωση, στην οποία εµπλέκονται όλες οιµορφές ενέργειας και ισχύος που εµφανίζονται στα δυναµικά συστήµατα (δυναµικήενέργεια, κινητική ενέργεια, διάχυση ισχύος και εξωτερική ισχύς του συστήµατος).Συνεπώς, εφαρµόζεται σε όλες, ανεξαιρέτως, τις περιπτώσεις, όπως σε γραµµικά και µηγραµµικάµηχανικά συστήµατα, σε υδραυλικά συστήµατα, σε ηλεκτρικά συστήµατακαθώς και σε συνδυασµούς αυτών (συζευγµένα συστήµατα).2. <strong>Ε</strong>µπλέκει µόνο ενεργειακές ποσότητες, οι οποίες αποτελούν βαθµωτά µεγέθη. Η συνολικήενέργεια του συστήµατος δεν είναι τίποτε άλλο παρά απλή πρόσθεση αυτών τωνβαθµωτών µεγεθών. Αντιθέτως, οι δυνάµεις, ως διανυσµατικά µεγέθη, απαιτούνδιανυσµατικές µεταξύ τους πράξεις, οι οποίες, σε ορισµένες περιπτώσεις (π.χ. εύκαµπτοςροµποτικός βραχίονας) είναι, σαφώς, πιο σύνθετες.3. Οι ενεργειακές ποσότητες σχετίζονται µε µαθηµατικές εκφράσεις τετραγωνικής µορφής,συνεπώς το τελικό ενεργειακό αποτέλεσµα δεν επηρεάζεται από τη σειρά µε την οποίααναγράφονται οι µετατοπίσεις σε µία µεταβολή. Αντιθέτως, η διαχείριση δυνάµεωναπαιτείται ιδιαίτερη προσοχή στην προσήµανσή τους.∆ιευκρινίζεται, ότι µε την <strong>Ε</strong>νεργειακή Αρχή Lagrange καταλήγουµε στις εξισώσειςισορροπίας του συστήµατος, δηλαδή στις Νευτώνειες εξισώσεις ισορροπίας, µε έναν πολύαπλό και πρακτικό τρόπο.Η µαθηµατική έκφραση της <strong>Ε</strong>νεργειακής Αρχής Lagrange είναι:∂ ⎛ ∂L⎞ ∂LPCPt⎜ ⎟ − + ∂ =∂∂t ⎝ ∂q̇ ⎠ ∂q ∂q̇ ∂q̇ (<strong>Ε</strong>28)Όρος αδράνειας(αντιστοιχεί σεδυνάµειςαδρανείας Fm)Όρος ελαστικότητος(αντιστοιχεί σεδυνάµεις ελατηρίουF )kΌρος διάχυσης(αντιστοιχεί σεδυνάµειςαπόσβεσης Fc)Όρος διέγερσης(αντιστοιχεί σεεξωτερικέςδυνάµεις F )όπου q είναι ανεξάρτητη κινηµατική µεταβλητή (Βαθµός <strong>Ε</strong>λευθερίας) του συστήµατος, ωςPCσυµβολίζεται η ενέργεια, η οποία διαχέεται λόγω της απόσβεσης του συστήµατος, ως Ptσυµβολίζεται η ισχύς που προσφέρεται στο σύστηµα από τις εξωτερικές δυνάµεις και ως Lσυµβολίζεται η αποκαλούµενη ‘ενεργειακή µεταβλητή Lagrange’. <strong>Ε</strong>ξ ορισµού, ισχύει:L = T − U(<strong>Ε</strong>29)- 19.15 -
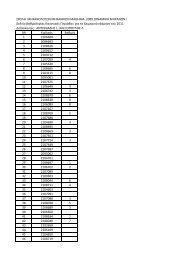
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και Κατασκευώνόπου ως T συµβολίζεται η κινητική ενέργεια του συστήµατος, η οποία συσσωρεύεται στιςµάζες του συστήµατος, ενώ ως U συµβολίζεται η δυναµική ενέργεια, η οποία συσσωρεύεταιστα ελατήρια του συστήµατος. Η εξίσωση (<strong>Ε</strong>.28) γράφεται τόσες φορές, όσες είναι οιανεξάρτητες µεταβλητές q που διαθέτει το σύστηµα. Ισοδύναµα, η εξίσωση (<strong>Ε</strong>28) γράφεταιτόσες φορές, όσοι είναι οι Βαθµοί <strong>Ε</strong>λευθερίας του εξεταζοµένου συστήµατος.<strong>Π</strong>αράδειγµαΈστω η τροχαλία του Σχήµατος 7, µαζικής ροπής αδρανείας Ι, εξωτερικής ακτίνας R,εσωτερικής ακτίνας r και αµελητέας µάζας. Ασκώντας (προς τα κάτω) µία κατακόρυφηδύναµη F, επιτυγχάνεται η κατακόρυφη ανύψωση της µάζας m, η οποία είναι ανηρτηµένηµέσω αβαρούς και µη-ελαστικού σχοινιού. Να βρεθεί η εξίσωση κίνησης της εξεταζόµενηςτροχαλίας, εφαρµόζοντας την <strong>Ε</strong>νεργειακή Αρχή Lagrange και θεωρώντας αµελητέες τιςόποιες τριβές.Σχήµα 7: <strong>Ε</strong>ξεταζόµενη τροχαλίαΈστω ότι u είναι η µετατόπιση του σηµείου εφαρµογής της δύναµης F και έστω ότι µε hσυµβολίζεται η κατακόρυφη ανύψωση της µάζας m.Η κινητική ενέργεια του εξεταζόµενου συστήµατος (συσσωρεύεται σε στοιχεία αδρανείαςτου συστήµατος) ισούται µε:2 2T = 0.5m ḣ+ 0.5 I ̇ θ(<strong>Ε</strong>30)Η δυναµική ενέργεια του εξεταζόµενου συστήµατος (συσσωρεύεται είτε ως ενέργειαπαραµόρφωσης σε παραµορφώσιµα στοχεία, π.χ. ελατήρια, είτε ως ενέργεια εξ αιτίας τουβαρυτικού πεδίου) ισούται µε:U = m g h(<strong>Ε</strong>31)Η προσφερόµενη στο σύστηµα ισχύς (οφείλεται στο εξωτερικά ασκούµενο αίτιο) ισούται µε:Pt= F u̇ (<strong>Ε</strong>32)Η διαχεόµενη (καταστρεφόµενη) στο σύστηµα ισχύς (ενέργεια διαχέεται είτε σε στοιχείααπόσβεσης είτε λόγω τριβών) είναι µηδενική, διότι στο σύστηµα δεν υπάρχουν στοιχείααπόσβεσης ή τριβές:Pc= 0(<strong>Ε</strong>33)Τα εµπλεκόµενα κινηµατικά µεγέθη είναι η κατακόρυφη µετατόπιση h της µάζας <strong>Μ</strong>, ηκατακόρυφη µετατόπιση u της δύναµης F και η γωνία θ της τροχαλίας. Ωστόσο, η γεωµετρία- 19.16 -
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και Κατασκευώντης τροχαλίας υπαγορεύει το συσχετισµό µεταξύ των µεγεθών u,θ και h,θ. <strong>Ε</strong>ιδικότερα,ισχύουν οι ακόλουθες σχέσεις:h = rθ(<strong>Ε</strong>34)καιu = Rθ(<strong>Ε</strong>35)Συνεπώς, εµφανίζονται 3 κινηµατικά µεγέθη (u,h,θ) και 2 εξίσωσης συσχέτισης αυτών τωνµεγεθών. <strong>Ε</strong>ποµένως, το σύστηµα εµφανίζει 3-2=1 ανεξάρτητο κινηµατικό µέγεθος.Ισοδύναµα, το εξεταζόµενο σύστηµα διαθέτει 1 Βαθµό <strong>Ε</strong>λευθερίας. <strong>Μ</strong>πορούµε να επιλέξουµεαυθαίρετα ένα από τα προαναφερθέντα κινηµατικά µεγέθη ως Βαθµό <strong>Ε</strong>λευθερίας (Β<strong>Ε</strong>). Έστωότι επιλέγουµε τη γωνία θ ως (Β<strong>Ε</strong>). Τότε θα ισχύει:( ̇ ) 22 2 2θ ̇ θ ̇ θ ( )T = 0.5m r + 0.5 I = 0.5 mr + IU = m g rθPt= F Rθ̇(<strong>Ε</strong>36)(<strong>Ε</strong>37)(<strong>Ε</strong>38)<strong>Ε</strong>φαρµόζοντας την <strong>Ε</strong>νεργειακή Αρχή Lagrange για τον (Β<strong>Ε</strong>) q = θ , η ενεργειακή µεταβλητήLagrange L του συστήµατος προκύπτει ίση µε:2 2L = T − U = 0.5 ̇ θ ( mr + I ) − m g rθ(<strong>Ε</strong>39)Συνεπώς, ισχύουν και τα ακόλουθα:∂ L =2( mr + I )̇ θ∂ ̇ θ(<strong>Ε</strong>40)d ⎛ ∂L ⎞ d = (( mr ) ) + I ̇ θ = ( mr 2 + I )̇̇⎜ ⎟θdt ⎝ ∂ ̇ θ ⎠ dt(<strong>Ε</strong>41)⎛ ∂L⎞− ⎜ ⎟ = m g r⎝ ∂θ⎠(<strong>Ε</strong>42)∂P C= 0∂ ̇ θ(<strong>Ε</strong>43)∂P t= F R∂ ̇ θ(<strong>Ε</strong>44)Αντικαθιστώντας στην εξίσωση (<strong>Ε</strong>28), προκύπτει:2mr + I ̇̇ θ + m g r = F R(<strong>Ε</strong>45)( )Η εξίσωση (<strong>Ε</strong>45) αποτελεί την εξίσωση κίνησης του εξεταζοµένου συστήµατος. Ταυτίζεται,δε, µε την εξίσωση ισορροπίας ροπών του συστήµατος.<strong>Π</strong>αρατήρηση: <strong>Ε</strong>άν η µάζα M τρ της τροχαλίας δεν είναι αµελητέα, τότε, θεωρώντας ότι ητροχαλία βρίσκεται σε ένα σταθερό ύψος Η ως προς το επίπεδο µηδενικής δυναµικήςενέργειας, η δυναµική ενέργεια του συστήµατος καθίσταται ίση µε:U = m g h + Mτρg H(<strong>Ε</strong>46)Ωστόσο, επειδή το ύψος Η είναι χρονικά σταθερό και ανεξάρτητο της γωνίας θ, ο όροςMτρ g H αποτελεί µία σταθερά στη µεταβλητή Lagrange L του συστήµατος, συνεπώς δενσυµµετέχει στις παραγωγίσεις (βλ. <strong>Ε</strong>40,<strong>Ε</strong>41,<strong>Ε</strong>42), άρα, τελικά, δεν συµµετέχει και στηνεξίσωση κίνησης του συστήµατος.- 19.17 -
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και Κατασκευών<strong>Ε</strong>φαρµογή: Γερανός µε φορείο κινούµενο επί σταθερού βραχίοναΈστω η διάταξη του Σχήµατος 8, στην οποία ένα φορείο µάζας <strong>Μ</strong> κινείται οριζόντια και προςτα δεξιά, επί βραχίονα, ο οποίος βρίσκεται σε σταθερό ύψος h. Από το κέντρο βάρους τουφορείου αναρτάται αβαρές και µη-ελαστικό συρµατόσχοινο, στο ελεύθερο άκρο Ρ του οποίουείναι σταθερά προσδεδεµένη µάζα m. Ζητείται η εξίσωση κίνησης του εξεταζοµένουσυστήµατος, χρησιµοποιώντας την <strong>Ε</strong>νεργειακή Αρχή Lagrange, θεωρώντας ότι κατά τηνκίνηση του φορείου το µήκος L του συρµατοσχοίνου παραµένει σταθερό (δηλαδή, η κίνησητου φορείου δεν συνοδεύεται µε ταυτόχρονη ανύψωση ή απόθεση της µάζας m) καιαµελώντας τις τριβές.Σχήµα 8: Γερανός µε φορείο κινούµενο επί σταθερού βραχίοναΗ κινητική ενέργεια του εξεταζόµενου συστήµατος ισούται µε:2 2 2̇ ̇ ̇ (<strong>Ε</strong>47)T = 0.5 M u + 0.5m x + 0.5m yΗ δυναµική ενέργεια του εξεταζόµενου συστήµατος ισούται µε (έστω επίπεδο µηδενικήςδυναµικής ενέργειας για Y I =0):U = M g h + m g y(<strong>Ε</strong>48)Η προσφερόµενη στο σύστηµα ισχύς (οφείλεται στο εξωτερικό αίτιο F το οποίο θέτει σεκίνηση το φορείο) ισούται µε:Pt= F u̇ (<strong>Ε</strong>49)Η διαχεόµενη στο σύστηµα ισχύς είναι µηδενική, διότι στο σύστηµα δεν υπάρχουν στοιχείααπόσβεσης ή τριβές:Pc= 0(<strong>Ε</strong>50)Στις εξισώσεις (<strong>Ε</strong>47-<strong>Ε</strong>50), τα εµπλεκόµενα κινηµατικά µεγέθη είναι οι µεταβλητές u, x και y.Ωστόσο, από την <strong>Ε</strong>νότητα 3 (Short notes) των <strong>Ε</strong>κπαιδευτικών Σηµειώσεων, είναι γνωστό ότιοι εξισώσεις θέσεως του σηµείου Ρ είναι:x = u − l sinϕ ⎫ ⎧ẋ= u̇− l ̇ ϕ cosϕ⎫⎬ ⇒ ⎨ ⎬y = h − l cosϕ ⎭ ⎩ ẏ= l ̇(<strong>Ε</strong>51)ϕ sinϕ⎭Συνεπώς, συνολικά εµπλέκονται 4 κινηµατικά µεγέθη (u,x,y,φ) και 2 εξίσωσης συσχέτισηςαυτών των µεγεθών. <strong>Ε</strong>ποµένως, το σύστηµα εµφανίζει 4-2=2 Βαθµούς <strong>Ε</strong>λευθερίας.<strong>Μ</strong>πορούµε να επιλέξουµε αυθαίρετα δύο από τα προαναφερθέντα κινηµατικά µεγέθη. Έστω- 19.18 -
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και Κατασκευώνότι επιλέγουµε την οριζόντια µετατόπιση u και τη γωνία φ. Σε αυτήν την περίπτωση, οιεξισώσεις (<strong>Ε</strong>47-<strong>Ε</strong>50) γράφονται ως εξής:Κινητική ενέργεια εξεταζόµενου συστήµατος:( ̇ ϕ ϕ ) ( ̇ ϕ ϕ )22 20.5 0.5 cos 0.5 sinT = M u̇ + m u̇ − l + m l(<strong>Ε</strong>52)∆υναµική ενέργεια εξεταζόµενου συστήµατος:<strong>Π</strong>ροσφερόµενη ισχύς:∆ιαχεόµενη ισχύς:( cos )U = M g h + m g h − l ϕ(<strong>Ε</strong>53)Pt= F u̇ (<strong>Ε</strong>54)Pc= 0(<strong>Ε</strong>55)Για την εύρεση των εξισώσεων κίνησης του εξεταζοµένου συστήµατος, θα πρέπει ναεφαρµοσθεί η <strong>Ε</strong>νεργειακή Αρχή Lagrange∂ ⎛ ∂L⎞ ⎛ ∂L⎞ ⎛ ∂Pc⎞ ⎛ ∂Pt⎞⎜ ⎟ − ⎜ ⎟ + ⎜ ⎟ = ⎜ ⎟∂t ⎝ ∂q̇ ⎠ ⎝ ∂q ⎠ ⎝ ∂q̇ ⎠ ⎝ ∂q̇⎠δύο φορές (µία για τη µεταβλητή u και µία για τη µεταβλητή φ). <strong>Ε</strong>ιδικότερα, θα ισχύει:Α. Για την ανεξάρτητη κινηµατική µεταβλητή q = uΓια τον αδρανειακό όρο:( )∂Lq= u ∂L∂ T −U⎯⎯→ = =∂q̇ ∂u̇ ∂u̇2{( 0.5 M u̇0.5m( u̇l ̇ ϕ cosϕ ) ( ) ) ( ( ))}2 0.5m l ̇ ϕ sinϕ 2M g h m g h l cosϕ(<strong>Ε</strong>56)∂= + − + − + − ⇒∂u̇∂L⇒ = M u̇+ m( u̇− l ̇ ϕ cosϕ)(<strong>Ε</strong>57)∂u̇<strong>Π</strong>αραγωγίζοντας ως προς το χρόνο, προκύπτει:∂ ⎛ ∂L⎞ ∂2⎜ ⎟ = ( M u̇ + m( u̇ − l ̇ ϕ cosϕ )) = M u̇̇ + mu̇̇− ml ̇̇ ϕ cosϕ + ml ̇ ϕ sinϕ(<strong>Ε</strong>58)∂t ⎝ ∂u̇⎠ ∂tΓια τον όρο ελαστικότητας:∂Lq= u ∂L∂ ( T −U)− ⎯⎯→− = = 0(<strong>Ε</strong>59)∂q ∂u ∂uΓια τον όρο διάχυσης:∂PCq=u ∂PC⎯⎯→ = 0(<strong>Ε</strong>60)∂q̇∂u̇Για τον όρο διέγερσης:∂Pt q=u ∂Pt ∂ ∂Pt⎯⎯→ = { F u̇} ⇒ = F(<strong>Ε</strong>61)∂q̇ ∂u̇ ∂u̇ ∂u̇Αντικαθιστώντας στην εξίσωση (<strong>Ε</strong>56) µε τις εξισώσεις (<strong>Ε</strong>58-<strong>Ε</strong>61), προκύπτει:2M u̇̇ + mu̇̇ − ml ̇̇ ϕ cosϕ + ml ̇ ϕ sinϕ= F(<strong>Ε</strong>62)- 19.19 -
<strong>Μ</strong>ηχανισµοί & <strong>Ε</strong>ισαγωγή στο Σχεδιασµό <strong>Μ</strong>ηχανών – Ακαδηµαϊκό έτος: 2011 - 2012©<strong>Ε</strong>.<strong>Μ</strong>.<strong>Π</strong>. – <strong>Σχολή</strong> <strong><strong>Μ</strong>ηχανολόγων</strong> <strong><strong>Μ</strong>ηχανικών</strong> - <strong>Ε</strong>ργαστήριο ∆υναµικής και ΚατασκευώνΒ. Για την ανεξάρτητη κινηµατική µεταβλητή q = ϕΓια τον αδρανειακό όρο:∂Lq= ϕ ∂L∂ ( T −U)⎯⎯⎯→ = =∂q̇∂ ̇ ϕ ∂ ̇ ϕ2{( 0.5 M u̇0.5m( u̇l ̇ ϕ cosϕ ) ( ) ) ( ( ))}2 0.5m l ̇ ϕ sinϕ 2M g h m g h l cosϕ∂= + − + − + − =∂ ̇ ϕ( m( u̇l ̇ ϕ cosϕ )( l cosϕ ) m( l ̇ ϕ sinϕ )( l sinϕ))= − − + =⎛⎜⎝̇⎞̇̇ ⎟⎠2 2 2 2= − mlu cosϕ + ml ϕ cos ϕ + ml ϕ sin ϕ =( ̇ ( ))̇ ̇= − mlu cosϕ + ml 2 ϕ cos 2 ϕ + sin 2 ϕ = − mlu cosϕ + ml2 ϕ ⇒∂L2⇒ = − mlu̇cosϕ+ ml ̇ ϕ∂ ̇ ϕ<strong>Π</strong>αραγωγίζοντας ως προς το χρόνο, προκύπτει:∂ ⎛ ∂L⎞⎜ ⎟ = − mlu̇̇cos∂t⎝ ∂ ̇ ϕ ⎠+ mlu̇̇ sin + ml ̇̇Για τον όρο ελαστικότητας:∂Lq= ϕ ∂L∂ ( T −U)− ⎯⎯⎯→− = =∂q∂ϕ∂ϕ2ϕ ϕ ϕ ϕ2{( 0.5 M u̇ 0.5m( u̇l ̇ ϕ cosϕ ) ( ) ) ( ( ))}2 0.5m l ̇ ϕ sinϕ 2M g h m g h l cosϕ∂= + − + − + − =∂ϕ( m( u̇l ̇ ϕ cosϕ )( l ̇ ϕ sinϕ ) m( l ̇ ϕ sinϕ )( l ̇ ϕ cosϕ )) m g ( l sinϕ)̇( )= − + − =̇ ̇ ̇ ̇2 2 2 2= mluϕ sinϕ − ml ϕ sinϕ cosϕ + ml ϕ sinϕ cosϕ − m g l sinϕ⇒(<strong>Ε</strong>63)(<strong>Ε</strong>64)∂L⇒ − = mlu̇ ̇ ϕ sinϕ − m g l sinϕ(<strong>Ε</strong>65)∂ϕΓια τον όρο διάχυσης:∂PCq=ϕ ∂PC⎯⎯⎯→ = 0(<strong>Ε</strong>66)∂q̇∂ ̇ ϕΓια τον όρο διέγερσης:∂Pt q=ϕ ∂Pt ∂ ∂Pt⎯⎯⎯→ = { F u̇} ⇒ = 0(<strong>Ε</strong>67)∂q̇∂ ̇ ϕ ∂ ̇ ϕ ∂ ̇ ϕΑντικαθιστώντας στην εξίσωση (<strong>Ε</strong>56) µε τις εξισώσεις (<strong>Ε</strong>64-<strong>Ε</strong>67), προκύπτει:2− mlu̇̇ cosϕ + mlu̇ ̇ ϕ sinϕ + ml ̇̇ ϕ + mlu̇̇ ϕ sinϕ − m g l sinϕ= 0 ⇒⇒ − mlu + mlu ̇ + ml ̇̇ − m g l =2̇̇ cosϕ 2 ̇ ϕ sinϕ ϕ sinϕ0(<strong>Ε</strong>68)Οι εξισώσεις (<strong>Ε</strong>62) και (<strong>Ε</strong>68) αποτελούν τις εξισώσεις κίνησης του εξεταζοµένουσυστήµατος.<strong>Π</strong>αρατήρηση: <strong>Ε</strong>άν κατά την κίνηση του φορείου, πραγµατοποιείται ταυτόχρονα καιανύψωση του φορτίου, τότε η ποσότητα L (µήκος συρµατοσχοίνου) µεταβάλλεται µε το χρόνο(άρα συµµετέχει στις χρονικές παραγωγίσεις).- 19.20 -