Effect of Hub Motor Mass on Stability and Comfort ... - Protean Electric
Effect of Hub Motor Mass on Stability and Comfort ... - Protean Electric
Effect of Hub Motor Mass on Stability and Comfort ... - Protean Electric

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Frequency (Hz)<br />
2.8<br />
2.6<br />
2.4<br />
2.2<br />
2<br />
1.8<br />
1.6<br />
1.4<br />
1.2<br />
1<br />
0 100 200 300 400 500 600 700<br />
St<strong>and</strong>ard<br />
<str<strong>on</strong>g>Hub</str<strong>on</strong>g>-driven<br />
Payload (kg)<br />
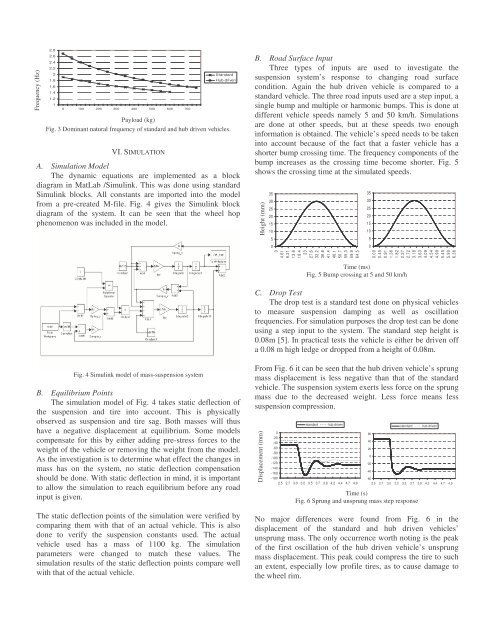
Fig. 3 Dominant natural frequency <str<strong>on</strong>g>of</str<strong>on</strong>g> st<strong>and</strong>ard <strong>and</strong> hub driven vehicles.<br />
VI. SIMULATION<br />
A. Simulati<strong>on</strong> Model<br />
The dynamic equati<strong>on</strong>s are implemented as a block<br />
diagram in MatLab /Simulink. This was d<strong>on</strong>e using st<strong>and</strong>ard<br />
Simulink blocks. All c<strong>on</strong>stants are imported into the model<br />
from a pre-created M-file. Fig. 4 gives the Simulink block<br />
diagram <str<strong>on</strong>g>of</str<strong>on</strong>g> the system. It can be seen that the wheel hop<br />
phenomen<strong>on</strong> was included in the model.<br />
Fig. 4 Simulink model <str<strong>on</strong>g>of</str<strong>on</strong>g> mass-suspensi<strong>on</strong> system<br />
B. Equilibrium Points<br />
The simulati<strong>on</strong> model <str<strong>on</strong>g>of</str<strong>on</strong>g> Fig. 4 takes static deflecti<strong>on</strong> <str<strong>on</strong>g>of</str<strong>on</strong>g><br />
the suspensi<strong>on</strong> <strong>and</strong> tire into account. This is physically<br />
observed as suspensi<strong>on</strong> <strong>and</strong> tire sag. Both masses will thus<br />
have a negative displacement at equilibrium. Some models<br />
compensate for this by either adding pre-stress forces to the<br />
weight <str<strong>on</strong>g>of</str<strong>on</strong>g> the vehicle or removing the weight from the model.<br />
As the investigati<strong>on</strong> is to determine what effect the changes in<br />
mass has <strong>on</strong> the system, no static deflecti<strong>on</strong> compensati<strong>on</strong><br />
should be d<strong>on</strong>e. With static deflecti<strong>on</strong> in mind, it is important<br />
to allow the simulati<strong>on</strong> to reach equilibrium before any road<br />
input is given.<br />
The static deflecti<strong>on</strong> points <str<strong>on</strong>g>of</str<strong>on</strong>g> the simulati<strong>on</strong> were verified by<br />
comparing them with that <str<strong>on</strong>g>of</str<strong>on</strong>g> an actual vehicle. This is also<br />
d<strong>on</strong>e to verify the suspensi<strong>on</strong> c<strong>on</strong>stants used. The actual<br />
vehicle used has a mass <str<strong>on</strong>g>of</str<strong>on</strong>g> 1100 kg. The simulati<strong>on</strong><br />
parameters were changed to match these values. The<br />
simulati<strong>on</strong> results <str<strong>on</strong>g>of</str<strong>on</strong>g> the static deflecti<strong>on</strong> points compare well<br />
with that <str<strong>on</strong>g>of</str<strong>on</strong>g> the actual vehicle.<br />
B. Road Surface Input<br />
Three types <str<strong>on</strong>g>of</str<strong>on</strong>g> inputs are used to investigate the<br />
suspensi<strong>on</strong> system’s resp<strong>on</strong>se to changing road surface<br />
c<strong>on</strong>diti<strong>on</strong>. Again the hub driven vehicle is compared to a<br />
st<strong>and</strong>ard vehicle. The three road inputs used are a step input, a<br />
single bump <strong>and</strong> multiple or harm<strong>on</strong>ic bumps. This is d<strong>on</strong>e at<br />
different vehicle speeds namely 5 <strong>and</strong> 50 km/h. Simulati<strong>on</strong>s<br />
are d<strong>on</strong>e at other speeds, but at these speeds two enough<br />
informati<strong>on</strong> is obtained. The vehicle’s speed needs to be taken<br />
into account because <str<strong>on</strong>g>of</str<strong>on</strong>g> the fact that a faster vehicle has a<br />
shorter bump crossing time. The frequency comp<strong>on</strong>ents <str<strong>on</strong>g>of</str<strong>on</strong>g> the<br />
bump increases as the crossing time become shorter. Fig. 5<br />
shows the crossing time at the simulated speeds.<br />
Height (mm)<br />
35<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
0<br />
4.61<br />
9.21<br />
13.8<br />
18.4<br />
23<br />
27.6<br />
32.2<br />
36.8<br />
41.4<br />
46.1<br />
50.7<br />
55.3<br />
59.9<br />
64.5<br />
Time (ms)<br />
Fig. 5 Bump crossing at 5 <strong>and</strong> 50 km/h<br />
35<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
0.00<br />
0.45<br />
0.91<br />
1.36<br />
1.82<br />
2.27<br />
2.72<br />
3.18<br />
3.63<br />
4.09<br />
4.54<br />
4.99<br />
5.45<br />
5.90<br />
6.36<br />
C. Drop Test<br />
The drop test is a st<strong>and</strong>ard test d<strong>on</strong>e <strong>on</strong> physical vehicles<br />
to measure suspensi<strong>on</strong> damping as well as oscillati<strong>on</strong><br />
frequencies. For simulati<strong>on</strong> purposes the drop test can be d<strong>on</strong>e<br />
using a step input to the system. The st<strong>and</strong>ard step height is<br />
0.08m [5]. In practical tests the vehicle is either be driven <str<strong>on</strong>g>of</str<strong>on</strong>g>f<br />
a 0.08 m high ledge or dropped from a height <str<strong>on</strong>g>of</str<strong>on</strong>g> 0.08m.<br />
From Fig. 6 it can be seen that the hub driven vehicle’s sprung<br />
mass displacement is less negative than that <str<strong>on</strong>g>of</str<strong>on</strong>g> the st<strong>and</strong>ard<br />
vehicle. The suspensi<strong>on</strong> system exerts less force <strong>on</strong> the sprung<br />
mass due to the decreased weight. Less force means less<br />
suspensi<strong>on</strong> compressi<strong>on</strong>.<br />
Displacement (mm)<br />
st<strong>and</strong>ard hub driven<br />
0<br />
-20<br />
-40<br />
-60<br />
-80<br />
-100<br />
-120<br />
-140<br />
-160<br />
-180<br />
2.5 2.7 3.0 3.2 3.5 3.7 3.9 4.2 4.4 4.7 4.9<br />
60<br />
40<br />
20<br />
0<br />
-20<br />
-40<br />
st<strong>and</strong>ard hub driven<br />
-60<br />
2.5 2.7 3.0 3.2 3.5 3.7 3.9 4.2 4.4 4.7 4.9<br />
Time (s)<br />
Fig. 6 Sprung <strong>and</strong> unsprung mass step resp<strong>on</strong>se<br />
No major differences were found from Fig. 6 in the<br />
displacement <str<strong>on</strong>g>of</str<strong>on</strong>g> the st<strong>and</strong>ard <strong>and</strong> hub driven vehicles’<br />
unsprung mass. The <strong>on</strong>ly occurrence worth noting is the peak<br />
<str<strong>on</strong>g>of</str<strong>on</strong>g> the first oscillati<strong>on</strong> <str<strong>on</strong>g>of</str<strong>on</strong>g> the hub driven vehicle’s unsprung<br />
mass displacement. This peak could compress the tire to such<br />
an extent, especially low pr<str<strong>on</strong>g>of</str<strong>on</strong>g>ile tires, as to cause damage to<br />
the wheel rim.