free-d Virtual Studio System Operators Guide - Vinten Radamec
free-d Virtual Studio System Operators Guide - Vinten Radamec
free-d Virtual Studio System Operators Guide - Vinten Radamec

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
LOMWIN<br />
DSP status: The status of the most recent calculation. A zero or positive value indicates the number of<br />
iterations required to compute the camera's position and orientation. A negative value indicates a failure:<br />
• 255 = too few targets<br />
• 254 = failed to converge<br />
• 253 = DSP reset<br />
• 252 = internal error.<br />
RMS error: The residual error, in pixels. This is a measure of how close the target images are to their<br />
theoretical positions. A value in excess of 0.1 should lead to a suspicion that a studio calibration is<br />
required, or that the wrong camera calibration file is being used.<br />
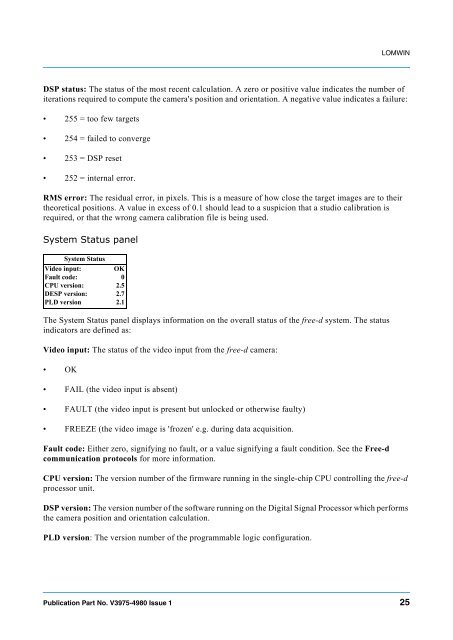
<strong>System</strong> Status panel<br />
<strong>System</strong> Status<br />
Video input:<br />
Fault code:<br />
CPU version:<br />
DESP version:<br />
PLD version<br />
The <strong>System</strong> Status panel displays information on the overall status of the <strong>free</strong>-d system. The status<br />
indicators are defined as:<br />
Video input: The status of the video input from the <strong>free</strong>-d camera:<br />
• OK<br />
OK<br />
0<br />
2.5<br />
2.7<br />
2.1<br />
• FAIL (the video input is absent)<br />
• FAULT (the video input is present but unlocked or otherwise faulty)<br />
• FREEZE (the video image is 'frozen' e.g. during data acquisition.<br />
Fault code: Either zero, signifying no fault, or a value signifying a fault condition. See the Free-d<br />
communication protocols for more information.<br />
CPU version: The version number of the firmware running in the single-chip CPU controlling the <strong>free</strong>-d<br />
processor unit.<br />
DSP version: The version number of the software running on the Digital Signal Processor which performs<br />
the camera position and orientation calculation.<br />
PLD version: The version number of the programmable logic configuration.<br />
Publication Part No. V3975-4980 Issue 1 25