An Introduction to Genetic Algorithms - Boente
An Introduction to Genetic Algorithms - Boente
An Introduction to Genetic Algorithms - Boente

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Chapter 2: <strong>Genetic</strong> <strong>Algorithms</strong> in Problem Solving<br />
Some early work on evolving CAs with genetic algorithms was done by Norman Packard and his colleagues<br />
(Packard 1988; Richards, Meyer, and Packard 1990). John Koza (1992) also applied the GP paradigm <strong>to</strong><br />
evolve CAs for simple random−number generation.<br />
Our work builds on that of Packard (1988). As a preliminary project, we used a form of the GA <strong>to</strong> evolve<br />
one−dimensional, binary−state r = 3 CAs <strong>to</strong> perform a density−classification task. The goal is <strong>to</strong> find a CA<br />
that decides whether or not the initial configuration contains a majority of<br />
ones (i.e., has high density). If it does, the whole lattice should eventually go <strong>to</strong> an unchanging configuration<br />
of all ones; all zeros otherwise. More formally, we call this task the task. Here Á denotes the density of<br />
ones in a binary−state CA configuration and Ác denotes a "critical" or threshold density for classification. Let<br />
Á0 denote the density of ones in the initial configuration (IC). If Á0 > Ác, then within M time steps the CA<br />
should go <strong>to</strong> the fixed−point configuration of all ones (i.e., all cells in state 1 for all subsequent t); otherwise,<br />
within M time steps it should go <strong>to</strong> the fixed−point configuration of all zeros. M is a parameter of the task that<br />
depends on the lattice size N.<br />
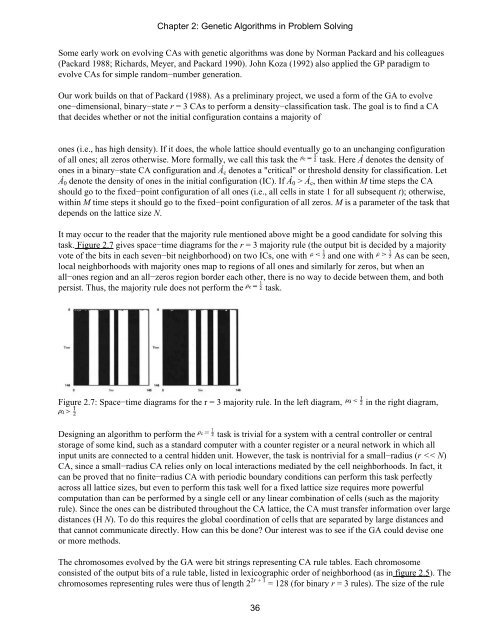
It may occur <strong>to</strong> the reader that the majority rule mentioned above might be a good candidate for solving this<br />
task. Figure 2.7 gives space−time diagrams for the r = 3 majority rule (the output bit is decided by a majority<br />
vote of the bits in each seven−bit neighborhood) on two ICs, one with and one with As can be seen,<br />
local neighborhoods with majority ones map <strong>to</strong> regions of all ones and similarly for zeros, but when an<br />
all−ones region and an all−zeros region border each other, there is no way <strong>to</strong> decide between them, and both<br />
persist. Thus, the majority rule does not perform the task.<br />
Figure 2.7: Space−time diagrams for the r = 3 majority rule. In the left diagram, in the right diagram,<br />
Designing an algorithm <strong>to</strong> perform the task is trivial for a system with a central controller or central<br />
s<strong>to</strong>rage of some kind, such as a standard computer with a counter register or a neural network in which all<br />
input units are connected <strong>to</strong> a central hidden unit. However, the task is nontrivial for a small−radius (r