Ventura Fuxx Drive DIS-2 Instruction Manual pdf - Kuhnke
Ventura Fuxx Drive DIS-2 Instruction Manual pdf - Kuhnke
Ventura Fuxx Drive DIS-2 Instruction Manual pdf - Kuhnke

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
KUHNKE Automation <strong>Fuxx</strong> <strong>Drive</strong> <strong>DIS</strong>-2<br />
In order to switch from the "64 positions" mode to the "16 positions" mode or vice versa,<br />
the <strong>DIS</strong>-2 has to reorganize the internal data structures for the positioning process.<br />
During this reorganization, settings already made for the targets are lost. The position<br />
data sets are reset to default values.<br />
This means that you have to re-parameterize all the targets after you have changed the<br />
operating mode.<br />
6.5 Parameterizing position sets<br />
In the <strong>DIS</strong>-2 servo positioning controller 16 or 64 positions sets can be parameterized. The<br />
parameterizing accomplished in the menu Parameters/Positioning/Destination parameters.<br />
Click the GO! to start a positioning run with the destination set currently displayed.<br />
Click the Positioning settings button if you want to change general positioning settings (e.g. position<br />
limits) (see chapter 6.4 Global positioning settings).<br />
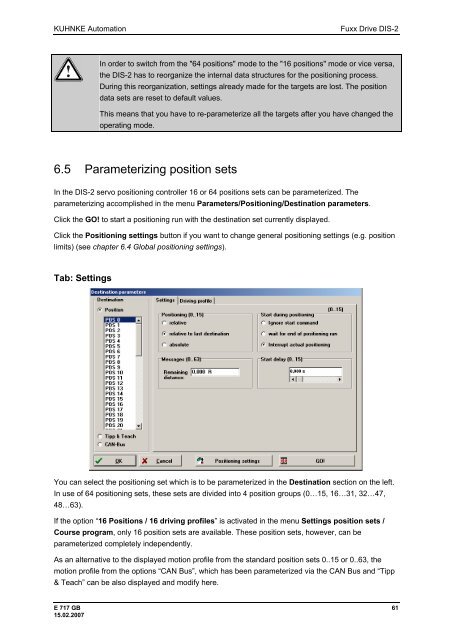
Tab: Settings<br />
You can select the positioning set which is to be parameterized in the Destination section on the left.<br />
In use of 64 positioning sets, these sets are divided into 4 position groups (0…15, 16…31, 32…47,<br />
48…63).<br />
If the option “16 Positions / 16 driving profiles” is activated in the menu Settings position sets /<br />
Course program, only 16 position sets are available. These position sets, however, can be<br />
parameterized completely independently.<br />
As an alternative to the displayed motion profile from the standard position sets 0..15 or 0..63, the<br />
motion profile from the options “CAN Bus”, which has been parameterized via the CAN Bus and “Tipp<br />
& Teach” can be also displayed and modify here.<br />
E 717 GB 61<br />
15.02.2007