

Manual de Funcionamiento VLT® FCD 300 - comser ltda.
Manual de Funcionamiento VLT® FCD 300 - comser ltda.
Manual de Funcionamiento VLT® FCD 300 - comser ltda.

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3<br />
3 Programación <strong>VLT®</strong> Descentralizado <strong>FCD</strong><br />
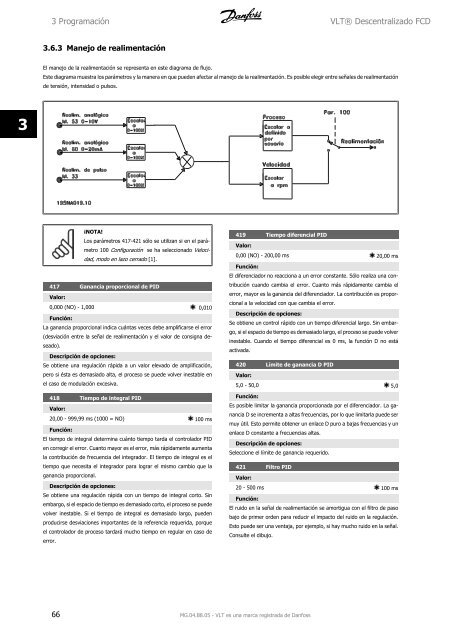
3.6.3 Manejo <strong>de</strong> realimentación<br />
El manejo <strong>de</strong> la realimentación se representa en este diagrama <strong>de</strong> flujo.<br />
Este diagrama muestra los parámetros y la manera en que pue<strong>de</strong>n afectar al manejo <strong>de</strong> la realimentación. Es posible elegir entre señales <strong>de</strong> realimentación<br />
<strong>de</strong> tensión, intensidad o pulsos.<br />
¡NOTA!<br />
Los parámetros 417-421 sólo se utilizan si en el parámetro<br />
100 Configuración se ha seleccionado Velocidad,<br />
modo en lazo cerrado [1].<br />
417 Ganancia proporcional <strong>de</strong> PID<br />
Valor:<br />
0,000 (NO) - 1,000 0,010<br />
Función:<br />
La ganancia proporcional indica cuántas veces <strong>de</strong>be amplificarse el error<br />
(<strong>de</strong>sviación entre la señal <strong>de</strong> realimentación y el valor <strong>de</strong> consigna <strong>de</strong>seado).<br />
Descripción <strong>de</strong> opciones:<br />
Se obtiene una regulación rápida a un valor elevado <strong>de</strong> amplificación,<br />
pero si ésta es <strong>de</strong>masiado alta, el proceso se pue<strong>de</strong> volver inestable en<br />
el caso <strong>de</strong> modulación excesiva.<br />
418 Tiempo <strong>de</strong> integral PID<br />
Valor:<br />
20,00 - 999,99 ms (1000 = NO) 100 ms<br />
Función:<br />
El tiempo <strong>de</strong> integral <strong>de</strong>termina cuánto tiempo tarda el controlador PID<br />
en corregir el error. Cuanto mayor es el error, más rápidamente aumenta<br />
la contribución <strong>de</strong> frecuencia <strong>de</strong>l integrador. El tiempo <strong>de</strong> integral es el<br />
tiempo que necesita el integrador para lograr el mismo cambio que la<br />
ganancia proporcional.<br />
Descripción <strong>de</strong> opciones:<br />
Se obtiene una regulación rápida con un tiempo <strong>de</strong> integral corto. Sin<br />
embargo, si el espacio <strong>de</strong> tiempo es <strong>de</strong>masiado corto, el proceso se pue<strong>de</strong><br />
volver inestable. Si el tiempo <strong>de</strong> integral es <strong>de</strong>masiado largo, pue<strong>de</strong>n<br />
producirse <strong>de</strong>sviaciones importantes <strong>de</strong> la referencia requerida, porque<br />
el controlador <strong>de</strong> proceso tardará mucho tiempo en regular en caso <strong>de</strong><br />
error.<br />
419 Tiempo diferencial PID<br />
Valor:<br />
0,00 (NO) - 200,00 ms 20,00 ms<br />
Función:<br />
El diferenciador no reacciona a un error constante. Sólo realiza una contribución<br />
cuando cambia el error. Cuanto más rápidamente cambia el<br />
error, mayor es la ganancia <strong>de</strong>l diferenciador. La contribución es proporcional<br />
a la velocidad con que cambia el error.<br />
Descripción <strong>de</strong> opciones:<br />
Se obtiene un control rápido con un tiempo diferencial largo. Sin embargo,<br />
si el espacio <strong>de</strong> tiempo es <strong>de</strong>masiado largo, el proceso se pue<strong>de</strong> volver<br />
inestable. Cuando el tiempo diferencial es 0 ms, la función D no está<br />
activada.<br />
420 Límite <strong>de</strong> ganancia D PID<br />
Valor:<br />
5,0 - 50,0 5,0<br />
Función:<br />
Es posible limitar la ganancia proporcionada por el diferenciador. La ganancia<br />
D se incrementa a altas frecuencias, por lo que limitarla pue<strong>de</strong> ser<br />
muy útil. Esto permite obtener un enlace D puro a bajas frecuencias y un<br />
enlace D constante a frecuencias altas.<br />
Descripción <strong>de</strong> opciones:<br />
Seleccione el límite <strong>de</strong> ganancia requerido.<br />
421 Filtro PID<br />
66 MG.04.B8.05 - VLT es una marca registrada <strong>de</strong> Danfoss<br />
Valor:<br />
20 - 500 ms 100 ms<br />
Función:<br />
El ruido en la señal <strong>de</strong> realimentación se amortigua con el filtro <strong>de</strong> paso<br />
bajo <strong>de</strong> primer or<strong>de</strong>n para reducir el impacto <strong>de</strong>l ruido en la regulación.<br />
Esto pue<strong>de</strong> ser una ventaja, por ejemplo, si hay mucho ruido en la señal.<br />
Consulte el dibujo.