ITTC Benchmark – Evaluación de Códigos Numéricos para ...
ITTC Benchmark – Evaluación de Códigos Numéricos para ...
ITTC Benchmark – Evaluación de Códigos Numéricos para ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
a) Comportamiento en Aguas Tranquilas:<br />
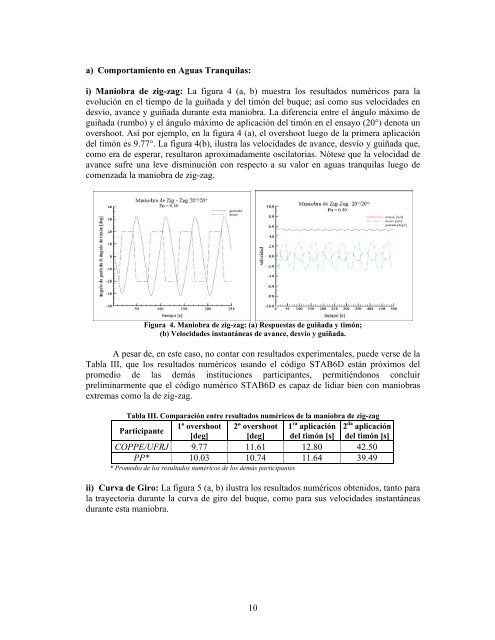
i) Maniobra <strong>de</strong> zig-zag: La figura 4 (a, b) muestra los resultados numéricos <strong>para</strong> la<br />
evolución en el tiempo <strong>de</strong> la guiñada y <strong>de</strong>l timón <strong>de</strong>l buque; así como sus velocida<strong>de</strong>s en<br />
<strong>de</strong>svío, avance y guiñada durante esta maniobra. La diferencia entre el ángulo máximo <strong>de</strong><br />
guiñada (rumbo) y el ángulo máximo <strong>de</strong> aplicación <strong>de</strong>l timón en el ensayo (20°) <strong>de</strong>nota un<br />
overshoot. Así por ejemplo, en la figura 4 (a), el overshoot luego <strong>de</strong> la primera aplicación<br />
<strong>de</strong>l timón es 9.77°. La figura 4(b), ilustra las velocida<strong>de</strong>s <strong>de</strong> avance, <strong>de</strong>svío y guiñada que,<br />
como era <strong>de</strong> esperar, resultaron aproximadamente oscilatorias. Nótese que la velocidad <strong>de</strong><br />
avance sufre una leve disminución con respecto a su valor en aguas tranquilas luego <strong>de</strong><br />
comenzada la maniobra <strong>de</strong> zig-zag.<br />
Figura 4. Maniobra <strong>de</strong> zig-zag: (a) Respuestas <strong>de</strong> guiñada y timón;<br />
(b) Velocida<strong>de</strong>s instantáneas <strong>de</strong> avance, <strong>de</strong>svío y guiñada.<br />
A pesar <strong>de</strong>, en este caso, no contar con resultados experimentales, pue<strong>de</strong> verse <strong>de</strong> la<br />
Tabla III, que los resultados numéricos usando el código STAB6D están próximos <strong>de</strong>l<br />
promedio <strong>de</strong> las <strong>de</strong>más instituciones participantes, permitiéndonos concluir<br />
preliminarmente que el código numérico STAB6D es capaz <strong>de</strong> lidiar bien con maniobras<br />
extremas como la <strong>de</strong> zig-zag.<br />
Tabla III. Com<strong>para</strong>ción entre resultados numéricos <strong>de</strong> la maniobra <strong>de</strong> zig-zag<br />
Participante<br />
1º overshoot<br />
[<strong>de</strong>g]<br />
2º overshoot<br />
[<strong>de</strong>g]<br />
1 ra aplicación<br />
<strong>de</strong>l timón [s]<br />
2 da aplicación<br />
<strong>de</strong>l timón [s]<br />
COPPE/UFRJ 9.77 11.61 12.80 42.50<br />
PP* 10.03 10.74 11.64 39.49<br />
* Promedio <strong>de</strong> los resultados numéricos <strong>de</strong> los <strong>de</strong>más participantes<br />
ii) Curva <strong>de</strong> Giro: La figura 5 (a, b) ilustra los resultados numéricos obtenidos, tanto <strong>para</strong><br />
la trayectoria durante la curva <strong>de</strong> giro <strong>de</strong>l buque, como <strong>para</strong> sus velocida<strong>de</strong>s instantáneas<br />
durante esta maniobra.<br />
10