ITTC Benchmark – Evaluación de Códigos Numéricos para ...
ITTC Benchmark – Evaluación de Códigos Numéricos para ...
ITTC Benchmark – Evaluación de Códigos Numéricos para ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Matriz <strong>de</strong> Ensayos<br />
La serie <strong>de</strong> ensayos realizados fue dividida en dos grupos:<br />
a) Comportamiento en aguas tranquilas (maniobrabilidad y estabilidad):<br />
• Prueba <strong>de</strong> Zig-Zag 20°/20° <strong>para</strong> número <strong>de</strong> Frou<strong>de</strong> (Fn) = 0.30.<br />
Parámetros a ser registrados: overshoot <strong>de</strong> guiñada, tiempos <strong>para</strong> la primera<br />
y segunda aplicación <strong>de</strong>l timón, y escora máxima.<br />
• Prueba <strong>de</strong> giro con ángulo <strong>de</strong> timón <strong>de</strong> 35° partiendo <strong>de</strong> Fn = 0.30.<br />
Parámetros a ser registrados: avance <strong>para</strong> cambios <strong>de</strong> rumbo <strong>de</strong> 10° y 20°,<br />
escora máxima, transferencia y diámetro táctico.<br />
• Decaimiento en rolido <strong>para</strong> las siguientes condiciones:<br />
i) Fn = 0.00 e inclinación inicial (φ0) equivalente al 80% <strong>de</strong>l ángulo<br />
límite <strong>de</strong> estabilidad (φv), <strong>para</strong> GMT = 0.75 m.<br />
ii) Fn = 0.20 y φ0 = 0.3 φv, <strong>para</strong> GMT = 1.00 m.<br />
b) Comportamiento en olas extremas:<br />
• Rolido en mar <strong>de</strong> través <strong>para</strong> Fn =0.0, λ/ L = 1.0, 1.5 y H/λ = 1/15 (don<strong>de</strong>:<br />
λ = longitud <strong>de</strong> la ola, L = eslora <strong>de</strong>l buque, H = altura <strong>de</strong> la ola).<br />
• Corrida libre en mar <strong>de</strong> popa <strong>para</strong> las combinaciones <strong>de</strong> las siguientes<br />
condiciones: λ/L = 1.0, 1.5, H/λ = 1/15, Fn = 0.20, 0.30, y 0.40,<br />
aproamientos <strong>de</strong> 5°, 15° y 30°.<br />
Parámetros ser registrados: amplitu<strong>de</strong>s y fases <strong>de</strong> las respuestas en rolido,<br />
cabeceo, guiñada y ángulo <strong>de</strong>l timón bajo la acción <strong>de</strong> un piloto automático<br />
configurado con ganancias proporcional y diferencial fijas <strong>de</strong> 1.0 y 0.0,<br />
respectivamente.<br />
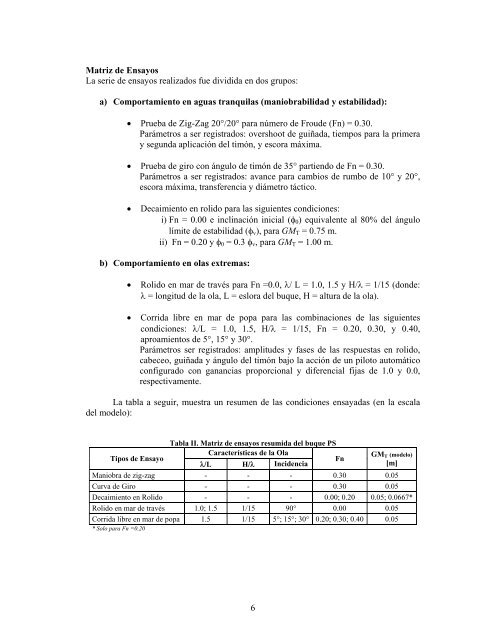
La tabla a seguir, muestra un resumen <strong>de</strong> las condiciones ensayadas (en la escala<br />
<strong>de</strong>l mo<strong>de</strong>lo):<br />
Tabla II. Matriz <strong>de</strong> ensayos resumida <strong>de</strong>l buque PS<br />
Tipos <strong>de</strong> Ensayo<br />
Características <strong>de</strong> la Ola<br />
λ/L H/λ Inci<strong>de</strong>ncia<br />
Fn<br />
GMT (mo<strong>de</strong>lo)<br />
[m]<br />
Maniobra <strong>de</strong> zig-zag - - - 0.30 0.05<br />
Curva <strong>de</strong> Giro - - - 0.30 0.05<br />
Decaimiento en Rolido - - - 0.00; 0.20 0.05; 0.0667*<br />
Rolido en mar <strong>de</strong> través 1.0; 1.5 1/15 90° 0.00 0.05<br />
Corrida libre en mar <strong>de</strong> popa<br />
* Solo <strong>para</strong> Fn =0.20<br />
1.5 1/15 5°; 15°; 30° 0.20; 0.30; 0.40 0.05<br />
6