ITTC Benchmark – Evaluación de Códigos Numéricos para ...
ITTC Benchmark – Evaluación de Códigos Numéricos para ...
ITTC Benchmark – Evaluación de Códigos Numéricos para ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>ITTC</strong> <strong>Benchmark</strong> <strong>–</strong> <strong>Evaluación</strong> <strong>de</strong> <strong>Códigos</strong> <strong>Numéricos</strong> <strong>para</strong><br />
Estabilidad Intacta: Estudio <strong>de</strong> la Zozobra <strong>de</strong> un Pesquero<br />
Rápido <strong>de</strong> Cerco en Mar <strong>de</strong> Popa<br />
Marcelo A. S. NEVES 1 , Claudio A. RODRÍGUEZ 2 , William M. CIPRIANO 3 ,<br />
Programa <strong>de</strong> Engenharia Oceânica - COPPE / LabOceano, Universida<strong>de</strong> Fe<strong>de</strong>ral do Rio <strong>de</strong> Janeiro<br />
C.P. 68.508, Rio <strong>de</strong> Janeiro, RJ, CEP 21945-970, Brasil<br />
masn@peno.coppe.ufrj.br; claudiorc@peno.coppe.ufrj.br; williancipriano@peno.coppe.ufrj.br;<br />
Telefax: +(5521) 2562-8715<br />
Resumen<br />
Recientemente, el Comité <strong>de</strong> Estabilidad en Olas <strong>de</strong> la <strong>ITTC</strong> (Conferencia Internacional <strong>de</strong><br />
Tanques <strong>de</strong> Remolque) ha emprendido un nuevo estudio benchmark <strong>de</strong> códigos numéricos <strong>para</strong> el<br />
análisis <strong>de</strong> estabilidad intacta en olas extremas. Para esto, un nuevo plan <strong>de</strong> ensayos experimentales<br />
con un buque pesquero <strong>de</strong> cerco rápido y <strong>de</strong> formas afinadas, fue realizado en olas regulares <strong>de</strong><br />
popa, <strong>para</strong> varios aproamientos y velocida<strong>de</strong>s. Con el objetivo <strong>de</strong> com<strong>para</strong>r diferentes códigos<br />
numéricos existentes, diversas instituciones internacionales fueron invitadas <strong>para</strong> someter<br />
resultados <strong>de</strong> sus simulaciones numéricas. El presente artículo muestra una visión preliminar <strong>de</strong> los<br />
resultados com<strong>para</strong>tivos obtenidos mediante un código no-lineal <strong>de</strong> seis grados <strong>de</strong> libertad<br />
<strong>de</strong>sarrollado por el LabOceano-COPPE/UFRJ, una <strong>de</strong> las instituciones participantes en dicho<br />
estudio. Dicho código, <strong>de</strong>nominado STAB6D, incorpora acoplamientos dinámicos (hasta el tercer<br />
or<strong>de</strong>n) <strong>de</strong> los movimientos <strong>de</strong> cuerpo rígido <strong>de</strong>l buque en olas, y un piloto automático. Los<br />
resultados presentados son: maniobras <strong>de</strong> zig-zag, curva <strong>de</strong> giro y <strong>de</strong>caimiento <strong>de</strong> rolido en aguas<br />
tranquilas <strong>para</strong> diferentes velocida<strong>de</strong>s <strong>de</strong> avance; respuestas <strong>de</strong> rolido en mar <strong>de</strong> través y<br />
movimientos extremos en mar <strong>de</strong> popa bajo la acción <strong>de</strong> olas extremas <strong>para</strong> diferentes<br />
aproamientos y velocida<strong>de</strong>s <strong>de</strong>l buque. Asimismo son examinadas situaciones <strong>de</strong> zozobra en mar<br />
<strong>de</strong> popa asociadas a condiciones <strong>de</strong> gran<strong>de</strong>s olas y frecuencias <strong>de</strong> encuentro muy bajas.<br />
Abstract<br />
The Stability in Waves Committee of the <strong>ITTC</strong> has recently un<strong>de</strong>rtaken a new benchmark study of<br />
numerical co<strong>de</strong>s for intact stability analysis in extreme waves. A new plan of experimental tests<br />
was carried out on a fast and slen<strong>de</strong>r purse seiner in astern regular waves for different wave<br />
encounters and speeds. International institutions were invited to submit their simulation results of<br />
the tested conditions, with the aim of comparing the various co<strong>de</strong>s. The present paper gives an<br />
introductory view of the com<strong>para</strong>tive results obtained by six <strong>de</strong>grees of freedom nonlinear co<strong>de</strong><br />
<strong>de</strong>veloped by LabOceano-COPPE/UFRJ, one of the institutions participating in the study. The<br />
co<strong>de</strong>, named STAB6D, incorporates dynamic coupling in waves of rigid body motions up to the<br />
third or<strong>de</strong>r and an auto-pilot. Results are presented for zig-zag maneuvering, turning circle and roll<br />
<strong>de</strong>cay in calm seas at different ship speeds; roll motions in beam seas and extreme responses in<br />
large waves at different quartering seas headings and speeds. Capsizing conditions associated with<br />
astern seas conditions, in which large waves at very small encounter frequencies are met, are<br />
examined.<br />
1 Ph.D., Profesor Principal, Programa <strong>de</strong> Ingeniería Oceánica, LabOceano-COPPE/UFRJ<br />
2 M.Sc., Alumno <strong>de</strong> Doctorado, Programa <strong>de</strong> Ingeniería Oceánica, LabOceano-COPPE/UFRJ<br />
3 M.Sc., Alumno <strong>de</strong> Doctorado, Programa <strong>de</strong> Ingeniería Oceánica, COPPE/UFRJ
INTRODUCCIÓN<br />
Durante muchos años, las tentativas <strong>para</strong> enten<strong>de</strong>r y tratar el problema <strong>de</strong> zozobra <strong>de</strong>l<br />
buque en olas han sido esporádicos y en general sin ninguna coordinación global. A pesar<br />
<strong>de</strong> esto, muchos investigadores e instituciones involucrados con el avance <strong>de</strong>l<br />
conocimiento en esta área han dado importantes contribuciones: Paulling y Rosenberg<br />
(1959), Du Cane y Goodrich (1962), Oakley et al. (1974), Hamamoto y Nomoto (1982),<br />
Umeda y Renilson (1994) entre otros. Muchos <strong>de</strong> estos trabajos han permitido i<strong>de</strong>ntificar<br />
analítica, numérica y/o experimentalmente muchos fenómenos propios <strong>de</strong>l comportamiento<br />
dinámico <strong>de</strong>l buque, <strong>para</strong> los que, aún hoy en día, existen pocos o ningún criterio unánime<br />
<strong>de</strong> evaluación. Dentro <strong>de</strong> estos fenómenos, los que más han atraído la atención <strong>de</strong><br />
investigadores e instituciones como la Organización Marítima Internacional (IMO), la<br />
Conferencia Internacional <strong>de</strong> Tanques <strong>de</strong> Remolque (<strong>ITTC</strong>), Socieda<strong>de</strong>s Clasificadoras,<br />
entre otras, son los mecanismos que llevan a la zozobra <strong>de</strong>l buque, principalmente en mar<br />
<strong>de</strong> popa, pues son éstas las condiciones más vulnerables <strong>para</strong> el buque.<br />
La IMO ya hace algunos años viene discutiendo la posibilidad <strong>de</strong> comenzar a<br />
adoptar criterios basados en el <strong>de</strong>sempeño <strong>de</strong>l buque en lugar <strong>de</strong> los criterios<br />
convencionales prescriptivos - basados en reglas (Umeda et al., 2003). Para facilitar este<br />
proceso es necesario que tanto ensayos con mo<strong>de</strong>los como simulaciones numéricas sean<br />
<strong>de</strong>sarrollados y validados. Sin embargo, hasta ahora no existe ninguna técnica <strong>de</strong><br />
predicción numérica estándar. Con este objetivo, la <strong>ITTC</strong>, <strong>de</strong>s<strong>de</strong> 1997, viene realizando<br />
ensayos experimentales y convocando comités y estudios benchmark <strong>para</strong> evaluar los<br />
resultados <strong>de</strong> las simulaciones numéricas <strong>de</strong> los diferentes códigos computacionales<br />
<strong>de</strong>sarrollados por las instituciones participantes.<br />
En el último estudio benchmark, <strong>de</strong>nominado 24th International <strong>Benchmark</strong><br />
Testing of Numerical Mo<strong>de</strong>lling on Intact Stability, convocado en Marzo <strong>de</strong> 2004, el<br />
Instituto Alberto Luiz Coimbra <strong>de</strong> Post-graduación e Investigación en Ingeniería (COPPE)<br />
<strong>de</strong> la Universidad Fe<strong>de</strong>ral <strong>de</strong> Rio <strong>de</strong> Janeiro (UFRJ), por medio <strong>de</strong> su Laboratorio <strong>de</strong><br />
Ingeniería Oceánica (LabOceano) fue invitada a formar parte como institución<br />
participante. Este benchmark consistió <strong>de</strong> dos fases. En la primera fase fueron publicados<br />
únicamente los datos <strong>de</strong>l buque y las condiciones ensayadas experimentalmente <strong>para</strong> que<br />
cada institución participante realice simulaciones numéricas y posteriormente, someta sus<br />
resultados ante el Comité Coordinador. Terminada esta fase, dicho comité publicó un<br />
reporte com<strong>para</strong>ndo los resultados numéricos obtenidos por todos los participantes en esta<br />
primera fase, y puso a disposición las series temporales experimentales, <strong>para</strong> eventuales<br />
ajustes en los códigos numéricos y reenvío <strong>de</strong> resultados. Una vez concluida la segunda<br />
fase, el Comité elaboró un nuevo reporte publicando com<strong>para</strong>ciones entre los resultados<br />
experimentales y los resultados numéricos <strong>de</strong> todos los participantes.<br />
En total fueron 7 las instituciones que participaron <strong>de</strong>l benchmark 2004-2005:<br />
• Universidad Tecnológica <strong>de</strong> Helsinki (HUT), Finlandia.<br />
• Instituto <strong>de</strong> Investigación <strong>de</strong> Buques e Ingeniería Oceánica (KRISO), Corea.<br />
• Instituto <strong>de</strong> investigación Marítima <strong>de</strong> Holanda (MARIN), Holanda.<br />
• Instituto Nacional <strong>de</strong> Investigación Marítima (NMRI), Japón.<br />
• Centro <strong>de</strong> Investigación <strong>de</strong> la Estabilidad <strong>de</strong>l Buque <strong>de</strong> las Universida<strong>de</strong>s <strong>de</strong><br />
Glasgow y Strathcly<strong>de</strong> (SSRC), Reino Unido.<br />
2
• Universidad <strong>de</strong> Osaka (OU), Departamento <strong>de</strong> Arquitectura Naval e Ingeniería<br />
Oceánica, Japón.<br />
• Laboratorio <strong>de</strong> Ingeniería Oceánica (LabOceano)/COPPE - Universidad Fe<strong>de</strong>ral <strong>de</strong><br />
Río <strong>de</strong> Janeiro (UFRJ), Brasil.<br />
En Septiembre <strong>de</strong>l presente año se llevará a cabo en Edimburgo, Escocia, el<br />
próximo encuentro <strong>de</strong>l comité Especialista en Estabilidad Intacta (24th <strong>ITTC</strong> Conference),<br />
don<strong>de</strong> será presentado el Informe Final consolidado <strong>de</strong>l Estudio <strong>Benchmark</strong> 2004-2005, y<br />
serán discutidos los resultados obtenidos por las instituciones que participaron <strong>de</strong>l estudio.<br />
Mecanismos <strong>de</strong> zozobra <strong>de</strong>l buque en mar <strong>de</strong> popa<br />
Como mencionado anteriormente, uno <strong>de</strong> las condiciones que representa mayor peligro <strong>de</strong><br />
zozobra <strong>para</strong> la operación <strong>de</strong>l buque es mar <strong>de</strong> popa. A partir <strong>de</strong> un extenso programa <strong>de</strong><br />
ensayos experimentales, realizados en la década <strong>de</strong>l 70 (Oakley et al., 1974) fue posible<br />
i<strong>de</strong>ntificar tres <strong>de</strong> los mecanismos más probables <strong>de</strong> zozobra en mar <strong>de</strong> popa, ellos son:<br />
a) Pérdida Simple <strong>de</strong> Estabilidad: Se da principalmente cuando el buque navega en<br />
velocida<strong>de</strong>s altas en mar <strong>de</strong> popa. Dependiendo <strong>de</strong> las formas <strong>de</strong>l buque, las<br />
características <strong>de</strong> la ola y su posición relativa en relación al buque, la curva <strong>de</strong><br />
estabilidad estática transversal (GZ) pue<strong>de</strong> sufrir gran<strong>de</strong>s variaciones en relación a sus<br />
valores respectivos en aguas tranquilas (Kerwin, 1955; Paulling, 1961). Así pues, <strong>para</strong><br />
el caso <strong>de</strong> una ola <strong>de</strong> longitud próxima a la eslora <strong>de</strong>l buque, con el valle <strong>de</strong> la ola<br />
situado en la sección media y con las crestas en los extremos <strong>de</strong> proa y popa, los<br />
brazos adrizantes aumentarán ligeramente haciendo al buque relativamente más<br />
estable. Por otro lado, cuando la cresta <strong>de</strong> la ola se sitúe en la sección media y los<br />
valles en los extremos, los brazos adrizantes se reducirán, ocurriendo una disminución<br />
<strong>de</strong> la estabilidad que inclusive pue<strong>de</strong> ser <strong>de</strong> hasta 50% en relación a los valores en<br />
aguas tranquilas. Caso esta última configuración buque-ola haga que los brazos<br />
adrizantes se hagan negativos durante un tiempo suficientemente largo, podrá<br />
acontecer la zozobra ante cualquier pequeña perturbación.<br />
b) Resonancia Paramétrica: Este mecanismo se refiere a movimientos oscilatorios <strong>de</strong><br />
rolido que pue<strong>de</strong>n crecer rápidamente, inclusive en ausencia <strong>de</strong> excitación externa<br />
directa (olas longitudinales, por ejemplo), alcanzando gran<strong>de</strong>s amplitu<strong>de</strong>s que pue<strong>de</strong>n<br />
culminar en la zozobra <strong>de</strong>l buque. Este tipo <strong>de</strong> inestabilidad es causada por las<br />
variaciones cíclicas <strong>de</strong> los brazos adrizantes <strong>de</strong>l buque cuando navega en olas, tal<br />
como explicado en el caso anterior, pero sin que sea necesario que los brazos<br />
adrizantes permanezcan negativos por un dado periodo. Este fenómeno es bastante<br />
más complejo, pues envuelve dinámicamente los movimientos <strong>de</strong>l buque acoplados en<br />
por lo menos tres grados <strong>de</strong> libertad (arfada, rolido e cabeceo), a<strong>de</strong>más <strong>de</strong> precisar <strong>de</strong><br />
una <strong>de</strong>terminada sintonía (en torno 2:1) entre la frecuencia <strong>de</strong> encuentro y la<br />
frecuencia natural, respectivamente (Paulling y Rosenberg, 1959).<br />
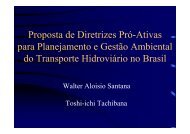
c) Broaching: Este fenómeno está relacionado con la estabilidad direccional <strong>de</strong>l buque<br />
en olas, principalmente en mar <strong>de</strong> popa. Este mecanismo <strong>de</strong> zozobra usualmente se da<br />
<strong>para</strong> el buque navegando en velocida<strong>de</strong>s altas en mar <strong>de</strong> popa, configurando así<br />
situaciones en que la frecuencia <strong>de</strong> encuentro está próxima <strong>de</strong> cero y el buque “surfea”<br />
sobre la ola. En estas condiciones el buque está propenso a ser “capturado” por la ola y<br />
3
acelerado a la velocidad <strong>de</strong> esta, pudiendo alcanzar inclusive velocida<strong>de</strong>s superiores a<br />
su velocidad <strong>de</strong> avance en aguas tranquilas. Asociado a estas condiciones pue<strong>de</strong> darse<br />
instabilidad direccional por pérdida <strong>de</strong> la eficiencia <strong>de</strong> la pala <strong>de</strong>l timón causada ya sea<br />
por la emersión <strong>de</strong> la popa o por la baja velocidad relativa entre el buque y la ola. Una<br />
<strong>de</strong>finición alternativa <strong>de</strong> broaching (Umeda y Renilson, 1992) es la siguiente:<br />
“Broaching es un fenómeno en el cual el buque es incapaz <strong>de</strong> mantener su rumbo a<br />
pesar <strong>de</strong> la aplicación <strong>de</strong> su máxima capacidad <strong>de</strong> gobierno”. La figura 1 es una<br />
reproducción <strong>de</strong> una secuencia clásica <strong>de</strong> ocurrencia <strong>de</strong> broaching <strong>para</strong> un buque<br />
militar (Du Cane y Goodrich, 1962).<br />
Figura 1. Secuencia dinámica que conduce al broaching.<br />
Como se pue<strong>de</strong> ver, la complejidad <strong>de</strong> la dinámica involucrada en los tres<br />
mecanismos <strong>de</strong> zozobra resulta imposible <strong>de</strong> ser mo<strong>de</strong>lada por mo<strong>de</strong>los numéricos o<br />
analíticos lineales. A<strong>de</strong>más, típicamente, maniobrabilidad y seakeeping (comportamiento<br />
<strong>de</strong>l buque en olas) son problemas tratados usualmente en la literatura <strong>de</strong> forma se<strong>para</strong>da.<br />
La maniobrabilidad clásica, abarca el estudio <strong>de</strong> los movimientos <strong>de</strong> avance, <strong>de</strong>svío, y<br />
guiñada, y asume aguas tranquilas, por tanto, las frecuencias <strong>de</strong> movimiento son<br />
normalmente bastante bajas, y los efectos viscosos relevantes. Ya el seakeeping clásico<br />
que involucra los movimientos <strong>de</strong> arfada, rolido, y cabeceo usualmente es estudiado<br />
basado en las hipótesis <strong>de</strong> la teoría potencial, entre ellas la que asume efectos viscosos<br />
<strong>de</strong>spreciables.<br />
El broaching como mecanismo <strong>de</strong> zozobra fue extensamente explorado en el<br />
estudio benchmark objeto <strong>de</strong>l presente trabajo, y pue<strong>de</strong> ser conceptuado como un<br />
problema <strong>de</strong> maniobrabilidad en olas. En este caso, la mo<strong>de</strong>lación analítica <strong>de</strong>be<br />
contemplar, por lo menos, las ecuaciones clásicas <strong>de</strong> maniobra, la ecuación <strong>de</strong> rolido y la<br />
<strong>de</strong>l timón acopladas (Umeda y Hashimoto, 2002).<br />
Para este benchmark, el LabOceano/COPPE-UFRJ <strong>de</strong>sarrolló un mo<strong>de</strong>lo analíticonumérico<br />
no-lineal <strong>de</strong> seis grados <strong>de</strong> libertad, que a<strong>de</strong>más <strong>de</strong> consi<strong>de</strong>rar los acoplamientos<br />
4
horizontales característicos <strong>de</strong> maniobra, incorpora también la compleja dinámica nolineal<br />
<strong>de</strong> las transferencias <strong>de</strong> energía <strong>de</strong> los modos verticales <strong>para</strong> el movimiento <strong>de</strong><br />
rolido, así como la ecuación <strong>de</strong>l timón con piloto automático. De hecho, este mo<strong>de</strong>lo es<br />
una ampliación <strong>de</strong>l mo<strong>de</strong>lo no-lineal <strong>de</strong> tercera or<strong>de</strong>n <strong>de</strong> tres grados <strong>de</strong> libertad <strong>para</strong><br />
estudio <strong>de</strong> la resonancia <strong>para</strong>métrica <strong>de</strong>sarrollado por Rodríguez (2004) y presentado<br />
también en Neves y Rodríguez (2004, 2005); incorporando ahora el mo<strong>de</strong>lo <strong>de</strong> tercera<br />
or<strong>de</strong>n <strong>de</strong> Abkowitz (1964). Así pues, este nuevo código (STAB6D) <strong>de</strong>berá ser capaz <strong>de</strong><br />
reproducir los movimientos <strong>de</strong>l buque en condiciones extremas en sus seis grados <strong>de</strong><br />
libertad.<br />
CONDICIONES ENSAYADAS<br />
El buque ensayado por la <strong>ITTC</strong> <strong>para</strong> el presente benchmark correspon<strong>de</strong> a un pesquero<br />
rápido <strong>de</strong> cerco, <strong>de</strong> formas finas (típico japonés), <strong>de</strong>nominado aquí, PS. Las características<br />
principales y plano <strong>de</strong> formas <strong>de</strong> este buque son presentados en la Tabla I y la figura 2,<br />
respectivamente.<br />
Tabla I. Características <strong>de</strong>l buque PS<br />
Denominación<br />
Eslora entre perpendiculares 34.50 m<br />
Manga 7.60 m<br />
Puntal 3.07 m<br />
Calado medio 2.65 m<br />
Radio <strong>de</strong> giro en rolido 3.86 m<br />
Radio <strong>de</strong> giro en guiñada 3.28 m<br />
Radio <strong>de</strong> giro en cabeceo 3.28 m<br />
Altura metacéntrica transversal* 0.75 m<br />
Posición vertical <strong>de</strong>l C.G. 3.36 m<br />
*Sólo en los ensayos <strong>de</strong> <strong>de</strong>caimiento en rolido <strong>para</strong> número <strong>de</strong> Frou<strong>de</strong> 0.20, la<br />
altura metacéntrica usada fue <strong>de</strong> 1.00 m.<br />
Figura 2. Líneas <strong>de</strong> forma <strong>de</strong>l buque PS.<br />
Este buque fue reproducido en escala 1/15 y fue efectuada una serie sistemática <strong>de</strong><br />
ensayos radio-controlados <strong>para</strong> diferentes condiciones <strong>de</strong> altura <strong>de</strong> onda, aproamiento y<br />
velocidad <strong>de</strong> avance. Todos estos ensayos fueron realizados en el Tanque <strong>de</strong>l Instituto <strong>de</strong><br />
Ingeniería <strong>de</strong> Pesca <strong>de</strong> Japón (NRIFE).<br />
5
Matriz <strong>de</strong> Ensayos<br />
La serie <strong>de</strong> ensayos realizados fue dividida en dos grupos:<br />
a) Comportamiento en aguas tranquilas (maniobrabilidad y estabilidad):<br />
• Prueba <strong>de</strong> Zig-Zag 20°/20° <strong>para</strong> número <strong>de</strong> Frou<strong>de</strong> (Fn) = 0.30.<br />
Parámetros a ser registrados: overshoot <strong>de</strong> guiñada, tiempos <strong>para</strong> la primera<br />
y segunda aplicación <strong>de</strong>l timón, y escora máxima.<br />
• Prueba <strong>de</strong> giro con ángulo <strong>de</strong> timón <strong>de</strong> 35° partiendo <strong>de</strong> Fn = 0.30.<br />
Parámetros a ser registrados: avance <strong>para</strong> cambios <strong>de</strong> rumbo <strong>de</strong> 10° y 20°,<br />
escora máxima, transferencia y diámetro táctico.<br />
• Decaimiento en rolido <strong>para</strong> las siguientes condiciones:<br />
i) Fn = 0.00 e inclinación inicial (φ0) equivalente al 80% <strong>de</strong>l ángulo<br />
límite <strong>de</strong> estabilidad (φv), <strong>para</strong> GMT = 0.75 m.<br />
ii) Fn = 0.20 y φ0 = 0.3 φv, <strong>para</strong> GMT = 1.00 m.<br />
b) Comportamiento en olas extremas:<br />
• Rolido en mar <strong>de</strong> través <strong>para</strong> Fn =0.0, λ/ L = 1.0, 1.5 y H/λ = 1/15 (don<strong>de</strong>:<br />
λ = longitud <strong>de</strong> la ola, L = eslora <strong>de</strong>l buque, H = altura <strong>de</strong> la ola).<br />
• Corrida libre en mar <strong>de</strong> popa <strong>para</strong> las combinaciones <strong>de</strong> las siguientes<br />
condiciones: λ/L = 1.0, 1.5, H/λ = 1/15, Fn = 0.20, 0.30, y 0.40,<br />
aproamientos <strong>de</strong> 5°, 15° y 30°.<br />
Parámetros ser registrados: amplitu<strong>de</strong>s y fases <strong>de</strong> las respuestas en rolido,<br />
cabeceo, guiñada y ángulo <strong>de</strong>l timón bajo la acción <strong>de</strong> un piloto automático<br />
configurado con ganancias proporcional y diferencial fijas <strong>de</strong> 1.0 y 0.0,<br />
respectivamente.<br />
La tabla a seguir, muestra un resumen <strong>de</strong> las condiciones ensayadas (en la escala<br />
<strong>de</strong>l mo<strong>de</strong>lo):<br />
Tabla II. Matriz <strong>de</strong> ensayos resumida <strong>de</strong>l buque PS<br />
Tipos <strong>de</strong> Ensayo<br />
Características <strong>de</strong> la Ola<br />
λ/L H/λ Inci<strong>de</strong>ncia<br />
Fn<br />
GMT (mo<strong>de</strong>lo)<br />
[m]<br />
Maniobra <strong>de</strong> zig-zag - - - 0.30 0.05<br />
Curva <strong>de</strong> Giro - - - 0.30 0.05<br />
Decaimiento en Rolido - - - 0.00; 0.20 0.05; 0.0667*<br />
Rolido en mar <strong>de</strong> través 1.0; 1.5 1/15 90° 0.00 0.05<br />
Corrida libre en mar <strong>de</strong> popa<br />
* Solo <strong>para</strong> Fn =0.20<br />
1.5 1/15 5°; 15°; 30° 0.20; 0.30; 0.40 0.05<br />
6
MODELO MATEMÁTICO<br />
La Figura 3 muestra los sistemas <strong>de</strong> coor<strong>de</strong>nadas usados en la <strong>de</strong>finición <strong>de</strong> las ecuaciones<br />
que rigen el comportamiento <strong>de</strong>l buque en sus seis grados <strong>de</strong> libertad: avance (surge),<br />
<strong>de</strong>svío (sway), arfada (heave), rolido (roll), cabeceo (pitch) e guiñada (yaw). El sistema<br />
cxyz es un sistema móvil fijo en el cuerpo, en cuanto el sistema OXYZ es un sistema <strong>de</strong><br />
referencia inercial que acompaña al buque con velocidad constante U igual a la <strong>de</strong>l buque<br />
en aguas tranquilas.<br />
y<br />
Desvío (sway)<br />
δ<br />
θ<br />
Y<br />
Cabeceo (pitch)<br />
Timón (rud<strong>de</strong>r)<br />
Z<br />
z<br />
.<br />
.<br />
G<br />
c<br />
O<br />
ψ<br />
Arfada (heave)<br />
Guiñada (yaw)<br />
7<br />
X<br />
Avance (surge)<br />
φ<br />
x<br />
Rolido (roll)<br />
Figura 3. Sistemas <strong>de</strong> coor<strong>de</strong>nadas y <strong>de</strong>finición <strong>de</strong> los movimientos <strong>de</strong>l buque.<br />
Como mencionado anteriormente, maniobrabilidad y seakeeping son normalmente<br />
estudiados se<strong>para</strong>damente, <strong>de</strong> ahí que los sistemas <strong>de</strong> referencia usados convencionalmente<br />
<strong>para</strong> <strong>de</strong>scribirlos sean diferentes. En maniobras, los movimientos son <strong>de</strong>scritos usando el<br />
sistema móvil fijo en el cuerpo; y en ondas, el sistema <strong>de</strong> referencia adoptado es el sistema<br />
inercial que se <strong>de</strong>splaza con la velocidad constante <strong>de</strong>l buque en aguas tranquilas. Hasta la<br />
fecha, muy poca es la literatura que trata sobre la maniobrabilidad en olas. Así pues, <strong>para</strong><br />
usar un mo<strong>de</strong>lo matemático que incorpore las características tanto <strong>de</strong> maniobras como <strong>de</strong><br />
comportamiento en olas acopladamente, es preciso <strong>de</strong>scribir los 6 movimientos <strong>de</strong>l buque<br />
en un sistema <strong>de</strong> referencia único, mismo que las fuerzas y momentos actuantes estén<br />
inicialmente expresados en sistemas <strong>de</strong> referencias distintos.<br />
El mo<strong>de</strong>lo matemático usado en el presente trabajo se obtiene a partir <strong>de</strong><br />
expansiones en series <strong>de</strong> Taylor <strong>de</strong> las acciones hidrodinámicas (e hidrostáticas) que<br />
gobiernan al comportamiento <strong>de</strong>l buque. Las ecuaciones <strong>de</strong> maniobra <strong>de</strong> tercera or<strong>de</strong>n <strong>de</strong><br />
Abkowitz (1964) son adaptadas <strong>para</strong> el sistema <strong>de</strong> referencia inercial y acopladas a las<br />
ecuaciones no-lineales <strong>de</strong> tercera or<strong>de</strong>n en los modos <strong>de</strong> arfada, rolido y cabeceo,<br />
<strong>de</strong>sarrolladas por Rodríguez (2004), resultando así el siguiente sistema <strong>de</strong> ecuaciones nolineales<br />
con seis grados <strong>de</strong> libertad don<strong>de</strong> a<strong>de</strong>más se incorpora la ecuación <strong>de</strong>l piloto<br />
automático (Cipriano, 2005):
8<br />
+<br />
+<br />
+<br />
+<br />
θ<br />
+<br />
+<br />
+<br />
θ<br />
+<br />
+<br />
+<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛ +<br />
θ<br />
θ<br />
2<br />
3<br />
2<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
..<br />
..<br />
..<br />
2<br />
1<br />
6<br />
1<br />
2<br />
1<br />
)<br />
( y<br />
X<br />
x<br />
X<br />
x<br />
X<br />
X<br />
z<br />
X<br />
x<br />
X<br />
X<br />
mz<br />
z<br />
X<br />
x<br />
X<br />
m<br />
y<br />
y<br />
x<br />
x<br />
x<br />
x<br />
x<br />
z<br />
x<br />
G<br />
z<br />
x<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
+<br />
δ<br />
ψ<br />
+<br />
δ<br />
+<br />
ψ<br />
+<br />
δ<br />
+<br />
ψ<br />
+<br />
+<br />
ψ<br />
δ<br />
ψ<br />
δ<br />
ψ<br />
δδ<br />
ψ<br />
ψ<br />
ψ<br />
ψ<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
& .<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
2<br />
2<br />
2<br />
2<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
X<br />
y<br />
X<br />
y<br />
X<br />
x<br />
X<br />
x<br />
X<br />
x<br />
y<br />
X<br />
X<br />
y<br />
y<br />
x<br />
x<br />
x<br />
y<br />
y<br />
)<br />
,<br />
(<br />
2<br />
1 2<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
t<br />
X<br />
X<br />
x<br />
X<br />
x<br />
y<br />
X<br />
x<br />
y<br />
X w<br />
x<br />
x<br />
y<br />
x<br />
y<br />
χ<br />
+<br />
δ<br />
=<br />
δ<br />
ψ<br />
+<br />
δ<br />
+<br />
ψ δδ<br />
δ<br />
ψ<br />
δ<br />
ψ<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
+<br />
δ<br />
+<br />
ψ<br />
+<br />
+<br />
ψ<br />
+<br />
φ<br />
+<br />
+<br />
ψ<br />
+<br />
φ<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛<br />
−<br />
−<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛ +<br />
δδ<br />
ψ<br />
ψ<br />
ψ<br />
φ<br />
ψ<br />
φ<br />
2<br />
2<br />
3<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
..<br />
..<br />
..<br />
2<br />
1<br />
2<br />
1<br />
6<br />
1<br />
y<br />
Y<br />
y<br />
Y<br />
y<br />
Y<br />
Y<br />
Y<br />
y<br />
Y<br />
Y<br />
Y<br />
mz<br />
y<br />
Y<br />
m<br />
y<br />
y<br />
y<br />
y<br />
y<br />
y<br />
G<br />
y<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
+<br />
ψ<br />
+<br />
ψ<br />
+<br />
δ<br />
ψ<br />
+<br />
ψ<br />
+<br />
ψ<br />
+<br />
+<br />
ψ<br />
ψ<br />
δδ<br />
ψ<br />
ψ<br />
ψ<br />
ψ<br />
ψ<br />
2<br />
2<br />
2<br />
3<br />
2<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
6<br />
1<br />
2<br />
1<br />
x<br />
Y<br />
x<br />
Y<br />
Y<br />
y<br />
Y<br />
Y<br />
x<br />
y<br />
Y<br />
x<br />
y<br />
Y<br />
x<br />
x<br />
x<br />
y<br />
y<br />
x<br />
x<br />
y<br />
x<br />
y<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
+<br />
ψ<br />
φ<br />
+<br />
φ<br />
+<br />
δ<br />
ψ<br />
+<br />
δ<br />
+<br />
δ<br />
+<br />
ψ<br />
δ<br />
+<br />
δ<br />
ψ<br />
ψ<br />
φ<br />
φ<br />
φ<br />
φ<br />
δ<br />
ψ<br />
δ<br />
δ<br />
ψ<br />
ψ<br />
δ<br />
δ<br />
2<br />
3<br />
2<br />
2<br />
2<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
2<br />
1<br />
6<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
& Y<br />
Y<br />
y<br />
Y<br />
x<br />
Y<br />
x<br />
Y<br />
Y<br />
y<br />
Y<br />
y<br />
x<br />
x<br />
x<br />
y<br />
y<br />
=<br />
δ<br />
ψ<br />
φ<br />
+<br />
δ<br />
+<br />
φ<br />
δ<br />
+<br />
ψ<br />
+<br />
φ<br />
+<br />
φ<br />
+<br />
δ<br />
φ<br />
δ<br />
ψ<br />
φ<br />
δ<br />
φ<br />
φ<br />
δ<br />
ψ<br />
φ<br />
φ<br />
φ<br />
δδ<br />
φ<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
2<br />
2<br />
2<br />
2<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
Y<br />
y<br />
Y<br />
Y<br />
y<br />
Y<br />
y<br />
Y<br />
y<br />
Y<br />
Y<br />
y<br />
y<br />
y<br />
y<br />
y<br />
)<br />
,<br />
(<br />
6<br />
1 3<br />
t<br />
Y<br />
Y<br />
Y w χ<br />
+<br />
δ<br />
+<br />
δ δδδ<br />
δ<br />
( ) +<br />
θ<br />
φ<br />
+<br />
φ<br />
+<br />
+<br />
θ<br />
+<br />
+<br />
θ<br />
+<br />
θ<br />
+<br />
+<br />
+<br />
+<br />
+ φφθ<br />
φφ<br />
θ<br />
θ<br />
θ<br />
2<br />
2<br />
2<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
.<br />
..<br />
Z<br />
z<br />
Z<br />
z<br />
Z<br />
Z<br />
z<br />
Z<br />
Z<br />
Z<br />
z<br />
Z<br />
z<br />
Z<br />
m<br />
x<br />
Z<br />
x<br />
Z z<br />
zz<br />
z<br />
z<br />
z<br />
x<br />
x<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
& &<br />
&<br />
&<br />
&<br />
&<br />
&<br />
() +<br />
θ<br />
+<br />
+<br />
θ<br />
+<br />
θ<br />
+<br />
φ<br />
+<br />
+<br />
θ<br />
+<br />
θ θ<br />
θ<br />
θθ<br />
φφ<br />
ζ<br />
θθθ<br />
θθ<br />
2<br />
3<br />
2<br />
2<br />
3<br />
2<br />
2<br />
1<br />
6<br />
1<br />
2<br />
1<br />
2<br />
1<br />
6<br />
1<br />
2<br />
1<br />
z<br />
Z<br />
z<br />
Z<br />
z<br />
Z<br />
Z<br />
Z<br />
z<br />
t<br />
Z<br />
Z<br />
z<br />
Z zz<br />
zzz<br />
z<br />
z<br />
z<br />
() () () ( ) ( ) ( ) ( )<br />
t<br />
Z<br />
t<br />
Z<br />
t<br />
Z<br />
z<br />
t<br />
Z<br />
t<br />
Z<br />
z<br />
t<br />
Z<br />
z<br />
t<br />
Z<br />
t<br />
Z w<br />
z<br />
zz<br />
z<br />
,<br />
)<br />
(<br />
2<br />
2<br />
2<br />
χ<br />
=<br />
θ<br />
+<br />
φ<br />
+<br />
θ<br />
+<br />
θ<br />
+<br />
+<br />
+<br />
θ θθζ<br />
φφζ<br />
θ<br />
ζ<br />
ζζθ<br />
ζ<br />
ζζ<br />
ζθ<br />
( ) +<br />
φ<br />
+<br />
φ<br />
+<br />
ψ<br />
+<br />
φ<br />
+<br />
φ<br />
φ<br />
+<br />
φ<br />
+<br />
+<br />
ψ<br />
+<br />
φ<br />
+<br />
+<br />
+<br />
− φ<br />
φ<br />
ψ<br />
φ<br />
φ<br />
φ<br />
φ<br />
φ<br />
φ<br />
ψ<br />
φ<br />
z<br />
K<br />
K<br />
K<br />
K<br />
K<br />
K<br />
y<br />
K<br />
K<br />
K<br />
J<br />
y<br />
K<br />
mz z<br />
y<br />
xx<br />
y<br />
G<br />
.<br />
3<br />
.<br />
.<br />
..<br />
.. )<br />
(<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
& &<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
() () +<br />
φ<br />
+<br />
φ<br />
+<br />
φθ<br />
+<br />
φ<br />
θ<br />
+<br />
φ<br />
+<br />
φ<br />
+<br />
φθ ζζφ<br />
ζφ<br />
φθ<br />
θθφ<br />
φφφ<br />
φ<br />
φθ<br />
t<br />
K<br />
t<br />
K<br />
z<br />
K<br />
K<br />
K<br />
z<br />
K<br />
K z<br />
zz<br />
2<br />
1<br />
6<br />
1<br />
2<br />
1 2<br />
3<br />
2<br />
() () +<br />
ψ<br />
+<br />
φ<br />
+<br />
δ<br />
φ<br />
+<br />
ψ<br />
φ<br />
+<br />
φθ<br />
+<br />
φ<br />
ψ<br />
ψ<br />
ψ<br />
φ<br />
δδ<br />
φ<br />
ψ<br />
ψ<br />
φ<br />
ζφθ<br />
φ<br />
ζ<br />
3<br />
2<br />
2<br />
2<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
6<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
&<br />
&<br />
&<br />
&<br />
&<br />
& K<br />
y<br />
K<br />
K<br />
K<br />
t<br />
K<br />
z<br />
t<br />
K<br />
y<br />
y<br />
z<br />
+<br />
ψ<br />
δ<br />
+<br />
φ<br />
δ<br />
+<br />
ψ<br />
+<br />
δ<br />
ψ<br />
+<br />
φ<br />
ψ<br />
ψ<br />
ψ<br />
δ<br />
φ<br />
φ<br />
δ<br />
ψ<br />
δδ<br />
ψ<br />
φ<br />
φ<br />
ψ<br />
2<br />
2<br />
2<br />
2<br />
2<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
& K<br />
K<br />
y<br />
K<br />
K<br />
K<br />
y<br />
y<br />
)<br />
,<br />
(<br />
6<br />
1<br />
2<br />
1 3<br />
2<br />
.<br />
.<br />
.<br />
.<br />
.<br />
t<br />
K<br />
K<br />
K<br />
K<br />
y<br />
K<br />
y<br />
K w<br />
y<br />
y<br />
y<br />
χ<br />
+<br />
δ<br />
+<br />
δ<br />
=<br />
δ<br />
ψ<br />
φ<br />
+<br />
δ<br />
+<br />
δ δδδ<br />
δ<br />
δ<br />
ψ<br />
φ<br />
δ<br />
δ<br />
&<br />
&<br />
&<br />
&<br />
( ) +<br />
φ<br />
+<br />
+<br />
θ<br />
+<br />
+<br />
+<br />
+<br />
θ<br />
+<br />
θ<br />
+<br />
+<br />
+<br />
⎟<br />
⎠<br />
⎞<br />
⎜<br />
⎝<br />
⎛ + φφ<br />
θ<br />
θ<br />
θ<br />
2<br />
2<br />
2<br />
1<br />
2<br />
1<br />
.<br />
..<br />
M<br />
z<br />
M<br />
M<br />
z<br />
M<br />
z<br />
M<br />
z<br />
M<br />
M<br />
M<br />
J<br />
x<br />
M<br />
x<br />
M<br />
mz zz<br />
z<br />
z<br />
z<br />
yy<br />
x<br />
x<br />
G<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
& &<br />
&<br />
&<br />
&<br />
&<br />
&<br />
+<br />
θ<br />
+<br />
θ<br />
φ<br />
+<br />
φ<br />
+<br />
θ<br />
+<br />
+<br />
θ<br />
+<br />
θ θθ<br />
φφθ<br />
φφ<br />
θ<br />
θ<br />
θθ<br />
z<br />
M<br />
M<br />
z<br />
M<br />
z<br />
M<br />
z<br />
M<br />
z<br />
M<br />
M z<br />
z<br />
zz<br />
zzz<br />
z<br />
2<br />
2<br />
2<br />
2<br />
3<br />
2<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
1<br />
6<br />
1<br />
2<br />
1<br />
() () () () () () +<br />
θ<br />
+<br />
θ<br />
+<br />
+<br />
+<br />
θ<br />
+<br />
+<br />
θ θ<br />
ζ<br />
ζζθ<br />
ζ<br />
ζζ<br />
ζθ<br />
ζ<br />
θθθ<br />
z<br />
t<br />
M<br />
t<br />
M<br />
z<br />
t<br />
M<br />
z<br />
t<br />
M<br />
t<br />
M<br />
z<br />
t<br />
M<br />
M z<br />
zz<br />
z<br />
z<br />
2<br />
3<br />
6<br />
1<br />
() ( )<br />
t<br />
M<br />
t<br />
M<br />
t<br />
M w ,<br />
)<br />
(<br />
2<br />
2<br />
χ<br />
=<br />
θ<br />
+<br />
φ θθζ<br />
φφζ
⎛<br />
N .. &y<br />
& + N &φ<br />
&<br />
.. + ⎜ I z<br />
y φ ⎝<br />
⎞<br />
3 1<br />
2 1<br />
2<br />
+ N .. ⎟ψ&<br />
& + N . y&<br />
+ N . φ&<br />
+ N . ψ&<br />
+ N . . . y&<br />
+ N . . . y&<br />
ψ&<br />
+ N . y&<br />
δ +<br />
ψ ⎠ y φ ψ y y y 2 y ψ ψ 2 y δδ<br />
1<br />
2 1<br />
3 1<br />
2 1<br />
2<br />
N . . y&<br />
x&<br />
+ N . . . y&<br />
x&<br />
+ N . . . ψ&<br />
+ N . . . ψ&<br />
y&<br />
+ N . ψ&<br />
δ R<br />
y x 2 y x x 6 ψ ψ ψ 2 ψ y y 2 ψ δδ<br />
1<br />
2<br />
+ N . . ψ&<br />
x&<br />
+ N . . . ψ&<br />
x&<br />
ψ x 2 ψ x x<br />
+<br />
1<br />
2 1<br />
2 1<br />
2<br />
1 3 1<br />
2<br />
N . . δy&<br />
+ N . . δψ&<br />
+ N . δx&<br />
+ N . . δx&<br />
+ N . . y&<br />
ψ&<br />
δ + N . . . φ&<br />
+ N . . . φ&<br />
ψ&<br />
+<br />
2 δ y y 2 δ ψ ψ<br />
δ x 2 δ x x<br />
y ψ δ 6 φ φ φ 2 φ ψ ψ<br />
1<br />
N φ&<br />
2<br />
. δ<br />
2 φ δδ<br />
+ N φ&<br />
1<br />
y + N φ&<br />
2 1<br />
y + N ψφ&<br />
2<br />
. . &<br />
. . . &<br />
. . . &<br />
φ y 2 φ y y 2 ψ φ φ<br />
1<br />
+ N ψ&<br />
y&<br />
+ N δφ&<br />
2<br />
. .<br />
. .<br />
ψ y 2 δ φ φ<br />
+ N . δy&<br />
+<br />
δ y<br />
1 3<br />
N . . N N N w ( , t)<br />
6<br />
χ + δ + δ = δ ψ φ& & δ<br />
δδδ<br />
φ ψ δ<br />
K ψ&<br />
+ χ − ψ = δ&<br />
2 K1<br />
( ) TE<br />
+ δ<br />
En estas ecuaciones: x, y, z representan los movimientos traslacionales en avance,<br />
<strong>de</strong>svío y arfada, respectivamente; y φ, θ, ψ, y δ <strong>de</strong>scriben los movimientos angulares <strong>de</strong><br />
rolido, cabeceo, guiñada y timón, en ese or<strong>de</strong>n. Los puntos sobre las variables anteriores<br />
<strong>de</strong>notan <strong>de</strong>rivadas en relación al tiempo (un punto <strong>para</strong> velocidad y dos puntos <strong>para</strong><br />
aceleraciones). Las variables con subíndices (empleando la misma lógica anterior)<br />
representan coeficientes <strong>de</strong> amortiguamiento y masa adicional, respectivamente. Las<br />
variables con subíndices sin puntos son coeficientes <strong>de</strong> restauración hidrostática. Xw, Yw,<br />
Zw, Kw, Mw, y Nw, son las excitaciones externas causadas por las olas en cada uno <strong>de</strong> los<br />
seis grados <strong>de</strong> libertad <strong>de</strong>l buque; K1, K2, y TE son las ganancias proporcional, diferencial y<br />
atraso <strong>de</strong>l piloto automático, respectivamente.<br />
RESULTADOS NUMÉRICOS VS. EXPERIMENTALES<br />
A partir <strong>de</strong>l mo<strong>de</strong>lo matemático mostrado en la sección anterior, fue implementado<br />
computacionalmente un código numérico, <strong>de</strong>nominado STAB6D. Con este código, fue<br />
posible realizar las simulaciones numéricas <strong>de</strong> las condiciones ensayadas<br />
experimentalmente con el buque PS y com<strong>para</strong>rlas con las respectivas series temporales<br />
experimentales cedidas por la <strong>ITTC</strong> en la segunda fase <strong>de</strong>l estudio benchmark.<br />
Los coeficientes <strong>de</strong> masa adicional y amortiguamiento, así como las fuerzas y<br />
momentos <strong>de</strong> excitación externos fueron calculados inicialmente usando la Teoría <strong>de</strong> las<br />
Rebanadas (Salvesen et al., 1970). El amortiguamiento en rolido fue corregido y<br />
recalculado usando el método <strong>de</strong> Himeno (1981). Las <strong>de</strong>rivadas <strong>de</strong> maniobra <strong>para</strong> este<br />
buque fueron calculadas experimentalmente y publicadas en el trabajo <strong>de</strong> Umeda y<br />
Hashimoto (2002), e incorporadas según corresponda junto con los amortiguamientos y<br />
masas adicionales potenciales.<br />
A continuación, se muestran los resultados numéricos y las series temporales <strong>de</strong><br />
varias <strong>de</strong> las simulaciones numéricas efectuadas, comparándolas con las series temporales<br />
experimentales cedidas por la <strong>ITTC</strong>. Para una mejor organización, los resultados fueron<br />
agrupados según la matriz <strong>de</strong> ensayos mostrada en la Tabla II.<br />
9
a) Comportamiento en Aguas Tranquilas:<br />
i) Maniobra <strong>de</strong> zig-zag: La figura 4 (a, b) muestra los resultados numéricos <strong>para</strong> la<br />
evolución en el tiempo <strong>de</strong> la guiñada y <strong>de</strong>l timón <strong>de</strong>l buque; así como sus velocida<strong>de</strong>s en<br />
<strong>de</strong>svío, avance y guiñada durante esta maniobra. La diferencia entre el ángulo máximo <strong>de</strong><br />
guiñada (rumbo) y el ángulo máximo <strong>de</strong> aplicación <strong>de</strong>l timón en el ensayo (20°) <strong>de</strong>nota un<br />
overshoot. Así por ejemplo, en la figura 4 (a), el overshoot luego <strong>de</strong> la primera aplicación<br />
<strong>de</strong>l timón es 9.77°. La figura 4(b), ilustra las velocida<strong>de</strong>s <strong>de</strong> avance, <strong>de</strong>svío y guiñada que,<br />
como era <strong>de</strong> esperar, resultaron aproximadamente oscilatorias. Nótese que la velocidad <strong>de</strong><br />
avance sufre una leve disminución con respecto a su valor en aguas tranquilas luego <strong>de</strong><br />
comenzada la maniobra <strong>de</strong> zig-zag.<br />
Figura 4. Maniobra <strong>de</strong> zig-zag: (a) Respuestas <strong>de</strong> guiñada y timón;<br />
(b) Velocida<strong>de</strong>s instantáneas <strong>de</strong> avance, <strong>de</strong>svío y guiñada.<br />
A pesar <strong>de</strong>, en este caso, no contar con resultados experimentales, pue<strong>de</strong> verse <strong>de</strong> la<br />
Tabla III, que los resultados numéricos usando el código STAB6D están próximos <strong>de</strong>l<br />
promedio <strong>de</strong> las <strong>de</strong>más instituciones participantes, permitiéndonos concluir<br />
preliminarmente que el código numérico STAB6D es capaz <strong>de</strong> lidiar bien con maniobras<br />
extremas como la <strong>de</strong> zig-zag.<br />
Tabla III. Com<strong>para</strong>ción entre resultados numéricos <strong>de</strong> la maniobra <strong>de</strong> zig-zag<br />
Participante<br />
1º overshoot<br />
[<strong>de</strong>g]<br />
2º overshoot<br />
[<strong>de</strong>g]<br />
1 ra aplicación<br />
<strong>de</strong>l timón [s]<br />
2 da aplicación<br />
<strong>de</strong>l timón [s]<br />
COPPE/UFRJ 9.77 11.61 12.80 42.50<br />
PP* 10.03 10.74 11.64 39.49<br />
* Promedio <strong>de</strong> los resultados numéricos <strong>de</strong> los <strong>de</strong>más participantes<br />
ii) Curva <strong>de</strong> Giro: La figura 5 (a, b) ilustra los resultados numéricos obtenidos, tanto <strong>para</strong><br />
la trayectoria durante la curva <strong>de</strong> giro <strong>de</strong>l buque, como <strong>para</strong> sus velocida<strong>de</strong>s instantáneas<br />
durante esta maniobra.<br />
10
Figura 5. Maniobra <strong>de</strong> Giro: (a) Trayectoria <strong>de</strong>scrita por el buque;<br />
(b) velocida<strong>de</strong>s instantáneas en avance, <strong>de</strong>svío y guiñada.<br />
En este caso, tampoco se cuenta con los resultados experimentales completos. Las<br />
com<strong>para</strong>ciones entre los resultados numéricos <strong>de</strong>l STAB6D, con los dos resultados<br />
experimentales disponibles y los obtenidos por las <strong>de</strong>más instituciones (ver Tabla IV) nos<br />
permite concluir que el simulador numérico reproduce confiablemente la maniobra <strong>de</strong> giro.<br />
Tabla IV. Com<strong>para</strong>ción <strong>de</strong> resultados <strong>para</strong> la curva <strong>de</strong> giro<br />
Participante X90/L Y90/L DT/L X10/L X20/L φ<br />
[<strong>de</strong>g]<br />
r<br />
[rad/s]<br />
COPPE/UFRJ 2.91 1.30 3.07 1.20 1.59 4.64 4.43<br />
PP* 3.02 1.46 3.38 1.08 1.52 4.53 3.84<br />
Experimental N/A N/A N/A N/A N/A 4.66 4.35<br />
*Promedio <strong>de</strong> los resultados numéricos <strong>de</strong> los <strong>de</strong>más participantes<br />
N/A: resultados no disponibles.<br />
En la Tabla IV fue empleada la siguiente nomenclatura: X90 = avance, Y 90 =<br />
transferencia, DT = diámetro táctico, X10 = avance <strong>para</strong> cambio <strong>de</strong> rumbo <strong>de</strong> 10°, X20 =<br />
avance <strong>para</strong> cambio <strong>de</strong> rumbo <strong>de</strong> 20°, L = eslora <strong>de</strong>l buque; φ = escora permanente, r =<br />
tasa <strong>de</strong> variación permanente <strong>de</strong>l ángulo <strong>de</strong> guiñada.<br />
Terminada la evaluación <strong>de</strong> estos dos ensayos clásicos <strong>de</strong> maniobra, don<strong>de</strong> es<br />
preciso resaltar que la curva <strong>de</strong> giro incorpora fuertes influencias no-lineales (bien más que<br />
la maniobra <strong>de</strong> zig-zag), y dada la excelente concordancia entre nuestros resultados, los<br />
resultados experimentales y los <strong>de</strong> los <strong>de</strong>más participantes, pue<strong>de</strong> concluirse que la<br />
<strong>de</strong>scripción <strong>de</strong> las acciones hidrodinámicas no-lineales <strong>de</strong> la dinámica <strong>de</strong>l buque en el<br />
plano horizontal usando el programa STAB6D es satisfactoria.<br />
iii) Decaimiento en Rolido: Como mostrado en la matriz <strong>de</strong> ensayos, fueron realizados<br />
experimentos en dos condiciones:<br />
• Fn = 0.00; GM = 0.05 m (mo<strong>de</strong>lo): La figura 6 (a), ilustra conjuntamente los<br />
resultados numérico y experimental <strong>para</strong> esta condición <strong>de</strong> ensayo en la escala <strong>de</strong>l<br />
mo<strong>de</strong>lo.<br />
11
• Fn = 0.20; GM = 0.0667 m (mo<strong>de</strong>lo): La figura 6 (b), muestra los resultados<br />
numérico y experimental, en la escala <strong>de</strong>l mo<strong>de</strong>lo, <strong>para</strong> esta condición <strong>de</strong> ensayo.<br />
Figura 6. Decaimiento en rolido (escala <strong>de</strong>l mo<strong>de</strong>lo): (a) Fn = 0.00; (b) Fn = 0.20<br />
De las figuras anteriores pue<strong>de</strong> concluirse que en ambos casos, el <strong>de</strong>caimiento en<br />
rolido es reproducido satisfactoriamente en el aspecto cualitativo. Cuantitativamente, la<br />
concordancia es excepcionalmente satisfactoria <strong>para</strong> el caso <strong>de</strong> Fn = 0.20. Sin embargo, en<br />
el caso <strong>de</strong> Fn = 0.00, el amortiguamiento es subestimado en relación al experimento,<br />
principalmente en los primeros ciclos don<strong>de</strong> las amplitu<strong>de</strong>s <strong>de</strong> movimiento son gran<strong>de</strong>s, y<br />
la influencia <strong>de</strong> las condiciones iniciales experimentales <strong>de</strong> velocidad y aceleración (sobre<br />
las que parece, no hubo ningún control durante los ensayos) significativa. Otra explicación<br />
<strong>para</strong> esta diferencia pue<strong>de</strong> ser el hecho <strong>de</strong> que la componente <strong>de</strong> amortiguamiento <strong>de</strong><br />
formación <strong>de</strong> vórtices (eddy damping), una <strong>de</strong> las más difíciles <strong>de</strong> pre<strong>de</strong>cir, y que en el<br />
caso <strong>de</strong> Fn = 0.0 es una <strong>de</strong> las más significativas, no sea bien reproducida numéricamente.<br />
Por otro lado, se sabe que a medida que el número <strong>de</strong> Frou<strong>de</strong> crece esta contribución se va<br />
haciendo cada vez menor y la componente <strong>de</strong> sustentación (lift damping) se torna la más<br />
relevante. De ahí que, a pesar <strong>de</strong> la estimativa <strong>de</strong> amortiguamiento no ser muy buena <strong>para</strong><br />
el caso <strong>de</strong> Fn = 0.00, en el caso <strong>de</strong> Fn = 0.20 los resultados son excelentes. Como el<br />
principal objetivo <strong>de</strong>l presente trabajo es reproducir, más a<strong>de</strong>lante, situaciones <strong>de</strong><br />
broaching (en don<strong>de</strong> las velocida<strong>de</strong>s involucradas son <strong>de</strong> mo<strong>de</strong>radas a altas), el<br />
amortiguamiento <strong>para</strong> velocidad nula, no resulta <strong>de</strong> interés en este caso.<br />
b) Comportamiento en Olas Extremas:<br />
i) Comportamiento en mar <strong>de</strong> través: En este caso fueron ensayadas dos condiciones <strong>de</strong><br />
ola correspondientes a: λ/L = 1.0 y 1.5. Las series temporales (en la escala <strong>de</strong>l mo<strong>de</strong>lo)<br />
obtenidas con el simulador numérico son presentadas con las series experimentales en las<br />
figuras 7 a 9.<br />
En la figura 7, son mostradas las respuestas en rolido <strong>de</strong>l mo<strong>de</strong>lo <strong>para</strong> las dos condiciones<br />
ensayadas. Se observa que el mo<strong>de</strong>lo numérico captura la ten<strong>de</strong>ncia correcta <strong>de</strong><br />
crecimiento <strong>de</strong> la amplitud <strong>de</strong> respuesta con la longitud <strong>de</strong> la ola. Como las condiciones<br />
ensayadas no están próximas <strong>de</strong> la zona <strong>de</strong> resonancia, las amplitu<strong>de</strong>s <strong>de</strong> respuesta son<br />
pequeñas. En la condición (a), las diferencias entre los valores numéricos y experimentales<br />
son notables; sin embargo, <strong>de</strong>be tenerse en cuenta que las amplitu<strong>de</strong>s <strong>de</strong> rolido son muy<br />
bajas (máximo 4°), y la precisión experimental en estos casos, es siempre perjudicada.<br />
12
Figura 7. Respuestas en rolido en mar <strong>de</strong> través (escala <strong>de</strong>l mo<strong>de</strong>lo):<br />
(a) λ/L = 1.00; (b) λ/L = 1.5<br />
Figura 8. Respuestas en cabeceo en mar <strong>de</strong> través (escala <strong>de</strong>l mo<strong>de</strong>lo):<br />
(a) λ/L = 1.00; (b) λ/L = 1.5<br />
Figura 9. Respuestas en guiñada en mar <strong>de</strong> través (escala <strong>de</strong>l mo<strong>de</strong>lo):<br />
(a) λ/L = 1.00; (b) λ/L = 1.5<br />
De las figuras 9 (a, b) se observa que el mo<strong>de</strong>lo no permaneció enfrentando las olas<br />
<strong>de</strong> través durante todo el ensayo. Como el ensayo fue conducido <strong>de</strong>jando el mo<strong>de</strong>lo libre<br />
(sin ninguna contención artificial), aparece una <strong>de</strong>riva lenta (en los ensayos) que modifica<br />
13
la actitud <strong>de</strong>l mo<strong>de</strong>lo en relación a las olas, terminando por asumir una posición <strong>de</strong> 55° y<br />
35° en relación a las olas en las condiciones mostradas en las figuras 9 (a) y 9 (b),<br />
respectivamente. En relación a los resultados numéricos, se observa que las amplitu<strong>de</strong>s <strong>de</strong><br />
guiñada son parecidas a las experimentales, sin embargo, la ten<strong>de</strong>ncia <strong>de</strong> guiñada lenta<br />
(que <strong>de</strong> cierta forma también se refleja en el movimiento <strong>de</strong> rolido y cabeceo), no es<br />
capturada por las simulaciones.<br />
ii) Corrida Libre en mar <strong>de</strong> popa: En total fueron nueve las condiciones ensayadas<br />
resultantes <strong>de</strong> la combinación <strong>de</strong> velocida<strong>de</strong>s y aproamientos mostrados en la Tabla II.<br />
Para estos ensayos fueron registrados experimental y numéricamente las series temporales<br />
<strong>de</strong> los movimientos <strong>de</strong>l mo<strong>de</strong>lo en rolido, cabeceo y guiñada; y <strong>de</strong>l timón. Todas estas<br />
condiciones correspon<strong>de</strong>n a situaciones en que las olas ultrapasan el buque. En general,<br />
existen gran<strong>de</strong>s dificulta<strong>de</strong>s <strong>para</strong> la conducción <strong>de</strong> este tipo <strong>de</strong> ensayos, siendo muy pocos<br />
los laboratorios existentes con real capacidad <strong>para</strong> realizarlos, <strong>de</strong> ahí que en la práctica<br />
pocos resultados <strong>de</strong> ensayos en estas condiciones sean cedidos <strong>para</strong> fines <strong>de</strong> benchmarking.<br />
Del punto <strong>de</strong> vista numérico, los ensayos en mar <strong>de</strong> popa en olas extremas, son <strong>de</strong><br />
fundamental importancia <strong>para</strong> validar un código numérico, pues en estas condiciones las<br />
no-linealida<strong>de</strong>s son más fuertes (y los acoplamientos también), lo que constituye un<br />
problema bastante complejo <strong>de</strong> dinámica en olas.<br />
Las figuras 10 a 16 presentan las respuestas <strong>de</strong> rolido, cabeceo, guiñada y timón (en<br />
la escala <strong>de</strong>l mo<strong>de</strong>lo) <strong>para</strong> algunas <strong>de</strong> las condiciones ensayadas que se consi<strong>de</strong>ran <strong>de</strong><br />
mayor interés. Los resultados numéricos completos pue<strong>de</strong>n ser encontrados en Cipriano<br />
(2005).<br />
En la figura 10 pue<strong>de</strong> observarse que los resultados numéricos <strong>para</strong> rolido y<br />
cabeceo, <strong>para</strong> Fn = 0.20 y χ = 5° (inci<strong>de</strong>ncia <strong>de</strong> ola o aproamiento <strong>de</strong>l buque), son<br />
satisfactorios. Nótese sin embargo que, la serie temporal <strong>de</strong> rolido presenta algunas<br />
oscilaciones fuertes en los primeros ciclos <strong>de</strong>l ensayo (posiblemente por la aplicación <strong>de</strong><br />
aceleraciones iniciales <strong>para</strong> llevar el mo<strong>de</strong>lo rápidamente a la velocidad <strong>de</strong> ensayo) y el<br />
movimiento <strong>de</strong> cabeceo es ligeramente sobre-estimado en las simulaciones. Ya los ángulos<br />
<strong>de</strong> guiñada y <strong>de</strong>l timón tienen diferencias mínimas en relación a los experimentos.<br />
La figura 11 presentan las respuestas <strong>para</strong> condiciones <strong>de</strong> Fn = 0.20 y χ = 30°. Se<br />
pue<strong>de</strong> observar que la respuesta <strong>de</strong> rolido experimental no tiene las oscilaciones iniciales<br />
fuertes que aparecieron en el caso anterior y sus amplitu<strong>de</strong>s son bien reproducidas por el<br />
simulador, sin embargo, presenta una leve asimetría en el movimiento, que no es observada<br />
en las simulaciones numéricas. En la respuesta <strong>de</strong> cabeceo el mo<strong>de</strong>lo numérico sigue con<br />
valores un poco mayores que el experimental, pero aún congruentes y razonables. El<br />
movimiento <strong>de</strong> guiñada en esta condición <strong>de</strong> mayor oblicuidad tiene las amplitu<strong>de</strong>s muy<br />
próximas. En las respuestas <strong>de</strong>l timón las ten<strong>de</strong>ncias <strong>de</strong>l mo<strong>de</strong>lo numérico y la respuesta<br />
experimental mejoran en el transcurso <strong>de</strong>l tiempo siendo, en general, satisfactorias.<br />
14
Figura 10. Respuesta en mar <strong>de</strong> popa, Fn = 0.2 y χ = 5º (escala <strong>de</strong>l mo<strong>de</strong>lo).<br />
Figura 11. Respuesta en mar <strong>de</strong> popa, Fn = 0.20 y χ = 30º (escala <strong>de</strong>l mo<strong>de</strong>lo).<br />
15
En la figura 12, se muestran las respuestas <strong>para</strong> las condiciones <strong>de</strong> Fn = 0.3 y χ =<br />
5°, una condición con velocidad <strong>de</strong> avance más alta. Las amplitu<strong>de</strong>s <strong>de</strong> rolido, bastante<br />
gran<strong>de</strong>s, no son capturadas por el mo<strong>de</strong>lo numérico, en el cual el movimiento <strong>de</strong> rolido<br />
tien<strong>de</strong> a valores bien menores. Cabe resaltar, sin embargo, que las amplitu<strong>de</strong>s finales<br />
observadas en el experimento son relativamente bajas (<strong>de</strong>l or<strong>de</strong>n <strong>de</strong> 5°), pudiendo ser<br />
significativamente influenciadas por las aceleraciones iniciales <strong>de</strong>l mo<strong>de</strong>lo durante el<br />
ensayo. En relación a los movimientos <strong>de</strong> guiñada y <strong>de</strong>l timón, pue<strong>de</strong> observarse que como<br />
el aproamiento ensayado es pequeño, la influencia <strong>de</strong> alguna posible <strong>de</strong>riva lenta o guiñada<br />
lenta es mínimo, reflejándose esto, en la excelente concordancia <strong>de</strong> los movimientos <strong>de</strong><br />
guiñada y <strong>de</strong>l timón entre simulación y ensayo, don<strong>de</strong> la posición final <strong>de</strong>l buque<br />
permanece próxima <strong>de</strong> los 5° <strong>de</strong> rumbo (aproamiento comandado).<br />
Figura 12. Respuesta en mar <strong>de</strong> popa, Fn = 0.3 y χ = 5º (escala <strong>de</strong>l mo<strong>de</strong>lo).<br />
La figura 13 muestra las respuestas <strong>de</strong> rolido, cabeceo, guiñada y timón <strong>para</strong><br />
condiciones <strong>de</strong> Fn = 0.3 y χ = 30°. La ten<strong>de</strong>ncia <strong>de</strong> la amplitud <strong>de</strong> rolido a aumentar con el<br />
aproamiento es bien reproducida por el simulador (ver respuestas en rolido <strong>de</strong> las fig. 12 y<br />
13). Sin embargo, el simulador sigue siendo incapaz <strong>de</strong> reproducir cuantitativamente las<br />
amplitu<strong>de</strong>s finales <strong>de</strong> respuesta obtenidas en el experimento. La respuesta en cabeceo<br />
(<strong>de</strong>jando <strong>de</strong> lado el pequeño <strong>de</strong>sfase que se impone <strong>de</strong>spués <strong>de</strong> 18 segundos), es<br />
perfectamente reproducida, existiendo muy poca diferencia entre las amplitu<strong>de</strong>s <strong>de</strong>l<br />
mo<strong>de</strong>lo numérico y las respuestas experimentales. En cuanto a las respuestas <strong>de</strong> guiñada y<br />
<strong>de</strong>l timón, las ten<strong>de</strong>ncias son similares a las observadas <strong>para</strong> este mismo aproamiento en la<br />
velocidad inferior (Fn = 0.2); siendo únicamente las condiciones iniciales diferentes y las<br />
amplitu<strong>de</strong>s calculadas con el simulador levemente superiores a las <strong>de</strong>l ensayo.<br />
16
Figura 13. Respuesta en mar <strong>de</strong> popa, Fn = 0.30 y χ = 30º (escala <strong>de</strong>l mo<strong>de</strong>lo)<br />
En la figura 14 comenzamos a analizar las condiciones <strong>de</strong> ensayo <strong>de</strong> mayor<br />
velocidad, Fn = 0.4, en este caso <strong>para</strong> χ = 5°. Pue<strong>de</strong> observarse que las amplitu<strong>de</strong>s <strong>de</strong><br />
respuesta en rolido tanto en el ensayo como en la simulación numérica son relativamente<br />
bajas existiendo cierta proximidad entre ambos resultados. Sin embargo, como pue<strong>de</strong> verse<br />
en la respuesta <strong>de</strong> guiñada hay ocurrencia <strong>de</strong> broaching sin que resulte en zozobra. El<br />
broaching ocurre en torno <strong>de</strong> los 19 segundos, luego <strong>de</strong> lo cual, el experimento fue<br />
encerrado. Debe observarse también que el mo<strong>de</strong>lo numérico no reproduce el broaching <strong>de</strong><br />
la forma como aparece en la serie experimental. A pesar <strong>de</strong> esto, es importante notar que<br />
las amplitu<strong>de</strong>s <strong>de</strong> guiñada crecen significativamente, e inclusive, en torno <strong>de</strong> los 19<br />
segundos <strong>de</strong> la simulación, se registra un cambio brusco en el ángulo <strong>de</strong> guiñada numérico<br />
(pasando <strong>de</strong> 14° <strong>para</strong> <strong>–</strong>14° en pocos segundos), lo que según Renilson y Tuite (1997), ya<br />
caracteriza un broaching. Por este criterio, el broaching ocurre <strong>para</strong> variaciones bruscas<br />
(superiores a 20º) <strong>de</strong> ángulo <strong>de</strong> guiñada, ya con el timón posicionado en su máxima<br />
capacidad (timón saturado).<br />
17
Figura 14. Respuesta en mar <strong>de</strong> popa, Fn = 0.40 y χ = 5º (escala <strong>de</strong>l mo<strong>de</strong>lo)<br />
La figura 15 muestra las respuestas <strong>para</strong> la condición Fn = 0.4 y χ = 15°. Como en<br />
el caso anterior, se observa gran<strong>de</strong>s movimientos. Sin embargo, hay una clara diferencia,<br />
en el sentido <strong>de</strong> que con velocidad alta y aumento <strong>de</strong> ángulo <strong>de</strong> inci<strong>de</strong>ncia, ahora el mo<strong>de</strong>lo<br />
<strong>de</strong>sarrolla gran<strong>de</strong>s ángulos <strong>de</strong> rolido asimétricos. Se observa que se trata <strong>de</strong> una zozobra<br />
por excitación directa <strong>de</strong>l rolido causada por las olas oblicuas, y no únicamente <strong>de</strong>bido a la<br />
ocurrencia <strong>de</strong> un broaching típico. La zozobra ocurre en un tiempo un poco mayor que en<br />
el caso anterior. Este cambio <strong>de</strong> respuesta no es capturada por el mo<strong>de</strong>lo numérico. Las<br />
simulaciones muestran respuestas en rolido similares al caso anterior, en cuanto que <strong>para</strong> el<br />
movimiento <strong>de</strong> guiñada las amplitu<strong>de</strong>s crecen y presentan gran<strong>de</strong>s variaciones<br />
(reproduciendo bien la serie experimental). Numéricamente, el timón presenta saturaciones<br />
repetidas lo que asociado a la respuesta en guiñada indica gran proximidad <strong>de</strong> una<br />
situación <strong>de</strong> broaching.<br />
Finalmente, la figura 16 presenta las respuestas <strong>para</strong> la condición <strong>de</strong> mayor<br />
velocidad (Fn = 0.40) y mayor inci<strong>de</strong>ncia (χ = 30°), que es la condición ensayada más<br />
crítica. En este caso es posible observar en la respuesta <strong>de</strong> rolido, la evi<strong>de</strong>nte zozobra <strong>de</strong>l<br />
buque en la tercera oscilación. Los movimientos <strong>de</strong> cabeceo y guiñada siguen los padrones<br />
percibidos en los casos anteriores (<strong>de</strong>l mismo aproamiento), y en la realidad son bien<br />
reproducidos en las simulaciones. Lo que queda claro es que en esas condiciones <strong>de</strong> alta<br />
velocidad y gran<strong>de</strong>s oblicuida<strong>de</strong>s, condiciones muy difíciles <strong>para</strong> el buque, don<strong>de</strong> ocurre<br />
rápido e intensamente el proceso <strong>de</strong> zozobra, el mo<strong>de</strong>lo numérico no da respuestas<br />
satisfactorias <strong>para</strong> el movimiento <strong>de</strong> rolido.<br />
18
Figura 15. Respuesta en mar <strong>de</strong> popa, Fn = 0.4 y χ = 15º (escala <strong>de</strong>l mo<strong>de</strong>lo)<br />
Figura 16. Respuesta en mar <strong>de</strong> popa, Fn = 0.4 y χ = 30º (escala <strong>de</strong>l mo<strong>de</strong>lo)<br />
19
CONCLUSIONES<br />
El presente trabajo tuvo como objetivo mostrar las características <strong>de</strong>l código numérico<br />
STAB6D, <strong>de</strong>sarrollado por el LabOceano-COPPE/UFRJ, con motivo <strong>de</strong> su participación en<br />
el 24º Estudio <strong>Benchmark</strong> <strong>de</strong> <strong>Códigos</strong> <strong>Numéricos</strong> en Estabilidad Intacta, convocado por la<br />
<strong>ITTC</strong>. El Comité <strong>de</strong> la <strong>ITTC</strong> cedió resultados experimentales obtenidos a partir <strong>de</strong> ensayos<br />
<strong>de</strong> maniobra y comportamiento en olas con un mo<strong>de</strong>lo <strong>de</strong> pesquero <strong>de</strong> cerco rápido. Los<br />
resultados <strong>de</strong> los experimentos sirvieron como base com<strong>para</strong>tiva <strong>para</strong> evaluar el<br />
<strong>de</strong>sempeño <strong>de</strong>l código STAB6D. A continuación se presenta un resumen <strong>de</strong> los aspectos<br />
principales observados en el presente trabajo.<br />
Las maniobras <strong>de</strong> giro y zig-zag en aguas tranquilas son muy bien mo<strong>de</strong>ladas por<br />
los términos <strong>de</strong> tercera or<strong>de</strong>n <strong>de</strong> maniobrabilidad en avance, <strong>de</strong>svío y guiñada. Dada la<br />
excelente adherencia en las com<strong>para</strong>ciones es válido, por tanto, afirmar que, en mar <strong>de</strong><br />
popa y en pequeños ángulos <strong>de</strong> inci<strong>de</strong>ncia, cuanto más largas sean las olas y menores las<br />
frecuencias <strong>de</strong> encuentro, más preciso será el mo<strong>de</strong>lo en las <strong>de</strong>scripciones <strong>de</strong> las acciones<br />
hidrodinámicas relativas a estos modos (avance, <strong>de</strong>svío y guiñada).<br />
El análisis <strong>de</strong>l <strong>de</strong>caimiento <strong>de</strong> rolido en aguas tranquilas apuntó <strong>para</strong> una<br />
subestimación <strong>de</strong>l amortiguamiento en velocidad cero, y una excelente mo<strong>de</strong>lación en el<br />
caso <strong>de</strong>l amortiguamiento en velocidad <strong>de</strong> avance. Dado el hecho <strong>de</strong> que en las<br />
condiciones <strong>de</strong> mar <strong>de</strong> interés <strong>para</strong> este estudio (y en general, <strong>para</strong> análisis <strong>de</strong> estabilidad<br />
en mar <strong>de</strong> popa), el objetivo resi<strong>de</strong> en el <strong>de</strong> simular condiciones en la que el buque<br />
<strong>de</strong>sarrolla alguna velocidad <strong>de</strong> avance, vale concluir que el amortiguamiento en rolido <strong>de</strong>l<br />
algoritmo aquí implementado está fi<strong>de</strong>dignamente estimado en las simulaciones realizadas<br />
en este trabajo.<br />
Se sabe que las influencias más fuertes <strong>de</strong> los efectos viscosos actúan justamente en<br />
los modos <strong>de</strong> avance, <strong>de</strong>svío, rolido y guiñada. Por tanto, los buenos resultados en<br />
maniobras en aguas tranquilas y en el amortiguamiento en rolido indican que las<br />
influencias viscosas principales están bien mo<strong>de</strong>ladas. Siguiendo esa línea <strong>de</strong> raciocinio,<br />
las posibles razones <strong>para</strong> discrepancias en los resultados en olas extremas <strong>de</strong>berán ser<br />
prioritariamente buscadas en otras fenomenologías.<br />
En el caso <strong>de</strong> mar <strong>de</strong> popa, fueron investigadas nueve condiciones diferentes.<br />
Cualitativamente, se pue<strong>de</strong> <strong>de</strong>cir que las simulaciones numéricas acompañan<br />
razonablemente bien las respuestas experimentales. En general, son verificadas las mismas<br />
ten<strong>de</strong>ncias observadas en los ensayos experimentales. Dada la enorme complejidad <strong>de</strong> los<br />
problemas asociados a la estabilidad dinámica <strong>de</strong>l buque en olas extremas <strong>de</strong> popa resulta,<br />
en general, muy favorable la capacidad <strong>de</strong>l mo<strong>de</strong>lo numérico <strong>de</strong> simular los movimientos<br />
<strong>de</strong>l buque. Sin embargo, <strong>de</strong>l punto <strong>de</strong> vista cuantitativo, existen aún discrepancias que<br />
<strong>de</strong>ben ser investigadas.<br />
Queda claro que a medida que aumenta la velocidad <strong>de</strong>l buque y el ángulo <strong>de</strong><br />
inci<strong>de</strong>ncia <strong>de</strong> las olas, también aumenta la dificultad <strong>de</strong> mo<strong>de</strong>lación. Las condiciones <strong>de</strong><br />
ensayo en la velocidad más alta, Fn = 0.4, mostraron ser las condiciones más críticas <strong>de</strong>l<br />
punto <strong>de</strong> vista <strong>de</strong> estabilidad. En el caso <strong>de</strong>l aproamiento χ = 5º, pudo i<strong>de</strong>ntificarse un<br />
broaching típico, sin <strong>de</strong>sarrollar gran<strong>de</strong>s ángulos <strong>de</strong> rolido (por lo menos hasta don<strong>de</strong> el<br />
experimento fue registrado). Esa situación crítica fue relativamente bien simulada, a pesar<br />
20
<strong>de</strong> no tener el broaching configurado, en la simulación numérica, <strong>de</strong> la misma forma como<br />
ocurrió en el experimento. No obstante, ciertamente fue i<strong>de</strong>ntificada una situación <strong>de</strong> gran<br />
dificultad <strong>para</strong> mantener el rumbo en olas oblicuas.<br />
Finalmente, <strong>para</strong> velocida<strong>de</strong>s altas (Fn = 0.40) y aproamientos <strong>de</strong> 15° y 30°, se sitúan las<br />
condiciones <strong>de</strong> zozobra no i<strong>de</strong>ntificadas por el simulador numérico. Enormes ángulos <strong>de</strong><br />
rolido se <strong>de</strong>sarrollan muy rápidamente <strong>para</strong> <strong>de</strong>terminar la zozobra <strong>de</strong>l mo<strong>de</strong>lo. Las razones<br />
<strong>para</strong> tal crecimiento no son claras. Los modos acoplados no son muy diferentes <strong>de</strong> que en<br />
las condiciones anteriores, las que son reproducidas satisfactoriamente por el mo<strong>de</strong>lo<br />
numérico, y el movimiento <strong>de</strong> rolido no se encuentra en ninguna condición <strong>de</strong> sintonía<br />
reconocible. Otra característica resaltante es la gran asimetría que el movimiento <strong>de</strong> rolido<br />
(en los ensayos) presenta en estos casos, lo que indica la acción <strong>de</strong> <strong>de</strong> fuertes momentos <strong>de</strong><br />
escora media. Estos resultados <strong>de</strong>jan aun en abierto una serie <strong>de</strong> cuestiones relativas al<br />
problema <strong>de</strong> mantenimiento <strong>de</strong> en ondas oblicuas extremas. En realidad no hay únicamente<br />
dificultad en reproducir esas inestabilida<strong>de</strong>s, sino también en la dificultad <strong>de</strong> enten<strong>de</strong>r estos<br />
fenómenos extremadamente no-lineales.<br />
AGRADECIMIENTOS<br />
El presente trabajo es parte <strong>de</strong> un proyecto <strong>de</strong> investigación financiado por CNPq y<br />
LabOceano/COPPE/UFRJ <strong>de</strong>l Brasil. Los autores manifiestan su agra<strong>de</strong>cimiento por el<br />
apoyo recibido.<br />
REFERENCIAS<br />
Abkowitz, M. A., 1964, Lectures on Ship Hydrodynamics Steering and Maneuverability.<br />
Hydrodynamics Department Hydro-og Aerynodamisk Laboratorium, Report no.Hy-5,<br />
Lyngby, Denmark.<br />
Cipriano, W. M., 2005, Estabilida<strong>de</strong> do Navio em Condições Extremas: Estudo <strong>de</strong> um<br />
Mo<strong>de</strong>lo Numérico Não-Linear <strong>de</strong> Terceira Or<strong>de</strong>m Acoplado em Seis Graus <strong>de</strong> Liberda<strong>de</strong>.<br />
Tese <strong>de</strong> M. Sc., COPPE <strong>–</strong> Engenharia Oceânica, Universida<strong>de</strong> Fe<strong>de</strong>ral do Rio <strong>de</strong> Janeiro,<br />
Rio <strong>de</strong> Janeiro, RJ, Brasil.<br />
Du Cane, P., Goodrich, G. J., 1962, “The Following Sea, Broaching and Surging”. The<br />
Royal Institution of Naval Architects, Quarterly Transactions, vol. 104, no. 2.<br />
Hamamoto, M., Nomoto, K., 1982, “Transverse Stability of Ships in Following Seas”. In:<br />
Proceedings of 2nd International Conference on the Stability of Ships and Ocean Vehicles<br />
(STAB’82), Tokyo, Japan.<br />
Himeno, Y., 1981, Prediction of Ship Roll Damping <strong>–</strong> State of the Art. Dept. Naval<br />
Architecture and Marine Engineering, The University of Michigan, Report no. 239.<br />
Kerwin, J. E., 1955, “Notes on Rolling in Longitudinal Waves”, International Shipbuilding<br />
Progress, vol. 2, no. 16, pp. 597-614.<br />
21
Neves, M. A. S., Rodríguez, C. A., 2004, “Limits of Stability of Ships Subjected to Strong<br />
Parametric Excitation in Longitudinal Waves”. In: Proceedings of 2nd International<br />
Maritime Conference on Design for Safety, Sakay, Japan, pp. 139-145.<br />
Neves, M. A. S., Rodríguez, C. A., 2005, A Non-Linear Mathematical Mo<strong>de</strong>l of Higher<br />
Or<strong>de</strong>r for Strong Parametric Resonance of the Roll Motion of Ships in Waves, Marine<br />
Systems & Ocean Technology, vol. 1, no. 2, 2005 (to appear).<br />
Oakley, O. H., Paulling, J. R., Wood, P. D., 1974, “Ship Motions and Capsizing in Astern<br />
Seas”, In: Proc., 10 th Symposium on Naval Hydrodynamics, Cambridge, Massachusetts.<br />
Paulling, J. R., Rosenberg, R. M., 1959, “On Unstable Ship Motions Resulting From Non-<br />
Linear Coupling”, Journal of Ship Research, vol. 3, no. 1 (Jun.), pp. 36-46.<br />
Paulling, J. R. 1961. “The Transverse Stability of a Ship in a Longitudinal Seaway”,<br />
Journal of Ship Research, vol. 4, no. 4 (Mar.), pp. 37-49.<br />
Renilson, M. R., Tuite, A., 1997, “The Effect of GM on Broaching and Capsizing of Small<br />
Fishing Vessels in Following Seas”. In: Proceedings of 6th International Conference on<br />
the Stability of Ships and Ocean Vehicles (STAB’97), Varna, Bulgaria, pp. 149-161.<br />
Rodríguez, C. A., 2004, Estabilida<strong>de</strong> Dinâmica do Navio: Um Mo<strong>de</strong>lo Não-Linear <strong>de</strong><br />
Terceira Or<strong>de</strong>m. Tese <strong>de</strong> M. Sc., COPPE <strong>–</strong> Engenharia Oceânica, Universida<strong>de</strong> Fe<strong>de</strong>ral do<br />
Rio <strong>de</strong> Janeiro, Rio <strong>de</strong> Janeiro, RJ, Brasil.<br />
Salvesen, N., Tuck, O. E., Faltinsen, O., 1970, “Ship Motions and Sea Loads”,<br />
Transactions of SNAME, vol. 78, pp. 250-287.<br />
Umeda N., Hashimoto, H., 2002, “Qualitative aspects of nonlinear ship motions in<br />
following and quartering seas with high forward velocity”, Journal of Marine Science and<br />
Technology, vol. 6, pp. 111-121.<br />
Umeda, N., Renilson, M. R., 1992, “Wave Forces on a Ship Running in Quartering Seas <strong>–</strong><br />
A Simplified Calculation Method”. In: Proceedings of 11 th Australasian Fluid Mechanics<br />
Conference, Hobarth, Australia.<br />
Umeda, N., Renilson, M. R., 1994, “Broaching of Fishing Vessel in Following and<br />
Quartering Seas - Nonlinear Dynamical System Approach”. In: Proceedings of 8th<br />
International Conference on the Stability of Ships and Ocean Vehicles (STAB’94), Florida,<br />
The United States of America.<br />
Umeda, N., Hashimoto, H., Vassalos, D., Urano, S., Okou, K., 2003, “Non-Linear<br />
Dynamics on Parametric Roll Resonance with Realistic Numerical Mo<strong>de</strong>ling”. In:<br />
Proceedings of 8th International Conference on the Stability of Ships and Ocean Vehicles<br />
(STAB’2003), Madrid, Spain, pp. 281-290.<br />
22