Tesis Franciscov6.pdf - MaestrÃa en Ciencias de la Computación
Tesis Franciscov6.pdf - MaestrÃa en Ciencias de la Computación
Tesis Franciscov6.pdf - MaestrÃa en Ciencias de la Computación

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
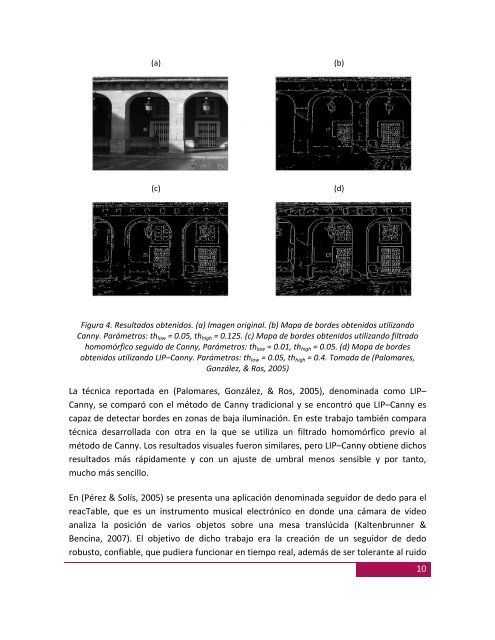
(a)(b)(c)(d)Figura 4. Resultados obt<strong>en</strong>idos. (a) Imag<strong>en</strong> original. (b) Mapa <strong>de</strong> bor<strong>de</strong>s obt<strong>en</strong>idos utilizandoCanny. Parámetros: th low = 0.05, th high = 0.125. (c) Mapa <strong>de</strong> bor<strong>de</strong>s obt<strong>en</strong>idos utilizando filtradohomomórfico seguido <strong>de</strong> Canny, Parámetros: th low = 0.01, th high = 0.05. (d) Mapa <strong>de</strong> bor<strong>de</strong>sobt<strong>en</strong>idos utilizando LIP–Canny. Parámetros: th low = 0.05, th high = 0.4. Tomada <strong>de</strong> (Palomares,González, & Ros, 2005)La técnica reportada <strong>en</strong> (Palomares, González, & Ros, 2005), d<strong>en</strong>ominada como LIP–Canny, se comparó con el método <strong>de</strong> Canny tradicional y se <strong>en</strong>contró que LIP–Canny escapaz <strong>de</strong> <strong>de</strong>tectar bor<strong>de</strong>s <strong>en</strong> zonas <strong>de</strong> baja iluminación. En este trabajo también comparatécnica <strong>de</strong>sarrol<strong>la</strong>da con otra <strong>en</strong> <strong>la</strong> que se utiliza un filtrado homomórfico previo almétodo <strong>de</strong> Canny. Los resultados visuales fueron simi<strong>la</strong>res, pero LIP–Canny obti<strong>en</strong>e dichosresultados más rápidam<strong>en</strong>te y con un ajuste <strong>de</strong> umbral m<strong>en</strong>os s<strong>en</strong>sible y por tanto,mucho más s<strong>en</strong>cillo.En (Pérez & Solís, 2005) se pres<strong>en</strong>ta una aplicación d<strong>en</strong>ominada seguidor <strong>de</strong> <strong>de</strong>do para elreacTable, que es un instrum<strong>en</strong>to musical electrónico <strong>en</strong> don<strong>de</strong> una cámara <strong>de</strong> vi<strong>de</strong>oanaliza <strong>la</strong> posición <strong>de</strong> varios objetos sobre una mesa translúcida (Kalt<strong>en</strong>brunner &B<strong>en</strong>cina, 2007). El objetivo <strong>de</strong> dicho trabajo era <strong>la</strong> creación <strong>de</strong> un seguidor <strong>de</strong> <strong>de</strong>dorobusto, confiable, que pudiera funcionar <strong>en</strong> tiempo real, a<strong>de</strong>más <strong>de</strong> ser tolerante al ruido10