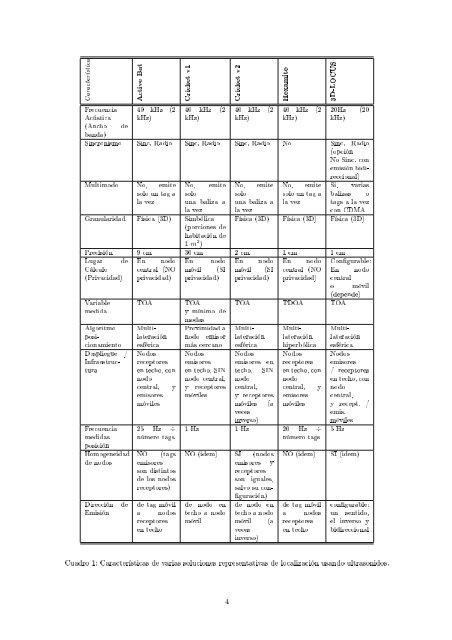
CaracterísticaFrecuenciaAcústica(Ancho<strong>de</strong>Active Bat40 kHz (2kHz)Cricket v140 kHz (2kHz)Cricket v240 kHz (2kHz)Hexamite40 kHz (2kHz)3D-LOCUS20Hz (20kHz)banda)Sincronismo Sinc. Radio Sinc. Radio Sinc. Radio No Sinc. Radio(opciónNo Sinc. conemisión bidireccional)Multimodo No, emitesolo un tag ala vezNo, emitesolouna baliza ala vezGranularidad Física (3D) Simbólica(porciones <strong>de</strong>habitación <strong>de</strong>1 m 2 )No, emite No, emite Si, variassolo solo un tag a balizas ouna baliza a la vez tags a la vezla vezcon CDMAFísica (3D) Física (3D) Física (3D)Precisión 9 cm 30 cm 2 cm 1 cm 1 cmLugar <strong>de</strong> En nodo En nodo En nodo En nodo Congurable:Cálculo central (NO móvil (SI móvil (SI central (NO En nodo(Privacidad) privacidad) privacidad) privacidad) privacidad) centralo móvil(<strong>de</strong>pen<strong>de</strong>)Variable TOA TOA TOA TDOA TOAmediday mínimo <strong>de</strong>FrecuenciamedidasposiciónHomogeneidad<strong>de</strong> nodosDirección <strong>de</strong>Emisión25 Hz ÷número tagsNO (tagsemisoresson distintos<strong>de</strong> los nodosreceptores)<strong>de</strong> tag móvila nodosreceptoresen techomodasProximidad anodo emisormás cercanoNodosemisoresen techo, SINnodo central,y receptoresmóviles1 Hz 1 Hz 20 Hz ÷número tagsNO (i<strong>de</strong>m) SI (nodosemisores yreceptoresson iguales,salvo su con-guración)<strong>de</strong> nodo en <strong>de</strong> nodo entecho a nodo techo a nodomóvil móvil (avecesinverso)NO (i<strong>de</strong>m)<strong>de</strong> tag móvila nodosreceptoresen techoAlgoritmoposicionamientoDespliegue /InfraestructuraMultilateraciónesféricaNodosreceptoresen techo, connodocentral, yemisoresmóvilesMultilateraciónesféricaNodosemisores entecho, SINnodocentral,y receptoresmóviles (avecesinverso)MultilateraciónhiperbólicaNodosreceptoresen techo, connodocentral, yemisoresmóvilesMultilateraciónesféricaNodosemisores/ receptoresen techo, connodocentral,y recept. /emis.móviles5 HzSI (i<strong>de</strong>m)congurable:un sentido,el inverso ybidireccionalCuadro 1: Características <strong>de</strong> varias soluciones representativas <strong>de</strong> <strong>localización</strong> usando ultrasonidos.4
Figura 1: Dispositivo generador <strong>de</strong> señales ultrasónicas que se cuelga <strong>de</strong>l cuello <strong>de</strong> una personacorrespondiente al sistema <strong>de</strong> <strong>localización</strong> <strong>de</strong> AT&T 'Active Bat'Cada emisor en el techo envía simultáneamente una señal ultrasónica (tren <strong>de</strong> pulsos) y una señal RF<strong>para</strong> sincronismo (indica al receptor cuando comienza la emisión ultrasónica) y a la vez por el canalRF se envían los datos <strong>de</strong> ubicación <strong>de</strong>l emisor. Solo pue<strong>de</strong> emitir una sola baliza a la vez <strong>para</strong> evitarinterferencias entre emisiones <strong>de</strong> radio y ultrasónicas, lo que implica que hay que planicar las emisionesrepartiendo los intervalos <strong>de</strong> tiempo <strong>de</strong> uso <strong>de</strong>l canal entre todas las balizas presentes. Para implementarlose ha creado un método <strong>de</strong> planicación distribuido, que tiene sus ventajas e inconvenientes:(+) No utiliza ningún sistema central <strong>para</strong> armonizar el disparo <strong>de</strong> las emisiones <strong>de</strong> cada baliza, loque implica mayor facilidad <strong>de</strong> <strong>de</strong>spliegue <strong>de</strong> los equipos(+) La probabilidad <strong>de</strong> interferencia, existe pero es relativamente baja(-) Baja frecuencia <strong>de</strong> medida, ya que hay que esperar una secuencia <strong>de</strong> emisiones antes <strong>de</strong> po<strong>de</strong>rcalcular una posición(-) Mal comportamiento en medidas dinámicas (movimiento) forzando el uso <strong>de</strong> estimadores tipoKalman <strong>para</strong> eliminar errores impulsivosLa segunda versión <strong>de</strong>l sistema Cricket (v2 [21]), trata <strong>de</strong> mejorar algunos aspectos <strong>de</strong> la primera:Una interfaz <strong>de</strong> programación, API, mejorada <strong>para</strong> permitir a los usuarios manejar los recursos abajo nivel y po<strong>de</strong>r congurar el sistema a medida.Mejora <strong>de</strong> la precisión en la medida <strong>de</strong> los tiempos <strong>de</strong> vuelo TOA (2 cm <strong>de</strong> error en v2, por 40 cmen v1). Ahora se utiliza un <strong>de</strong>tector <strong>de</strong> umbral <strong>de</strong> la señal ultrasónica recibida en vez <strong>de</strong> un <strong>de</strong>tector<strong>de</strong> tonos. La señal emitida es un tren <strong>de</strong> pulsos <strong>de</strong> 150 µs <strong>de</strong> duración.Menor consumo y utilización <strong>de</strong> paneles solares <strong>para</strong> que las balizas sean autónomas.Para mejorar el comportamiento dinámico se utiliza un ltro <strong>de</strong> Kalman <strong>para</strong> suavizar lasestimaciones. Cuando el estimador no es able, se reconguran los nodos, y se produce una emisión<strong>de</strong> los nodos móviles a los nodos en el techo (ahora actuando como receptores). De esta forma seproducen medidas <strong>de</strong> rangos simultáneas, hasta que se estabiliza el estimador <strong>de</strong> kalman.Existen otros enfoques don<strong>de</strong> el cálculo <strong>de</strong> la posición se hace también en el receptor móvil, como es elcaso <strong>de</strong> los sistemas <strong>de</strong> posicionamiento global (GPS, Galileo,...), aunque en estos casos la emisión esmultimodo, es <strong>de</strong>cir que todos los satélites (balizas) emiten simultáneamente sin apenas interferir entresi, gracias a que las señales están codicadas con códigos pseudoaleatorios tipo Gold. Otros sistemas enesta misma línea son los propuestos por Hazas [5], en los cuales, y como elementos diferenciadores, seutilizan transmisores <strong>de</strong> mayor ancho <strong>de</strong> banda con película PVDF y se codican las señales con códigospseudoaleatorios Gold.3.1.3. HexamiteEs un sistema comercial <strong>de</strong> una empresa australiana que tiene una solución bastante escalable <strong>para</strong>conseguir cubrir el volumen <strong>de</strong> trabajo que se <strong>de</strong>see. Consta <strong>de</strong> tres tipos <strong>de</strong> dispositivos: trasmisores,receptores y controladores. Dependiendo <strong>de</strong> si los trasmisores los utilizamos como dispositivos móvileso anclados al entorno, se obtienen soluciones que se asemejan al caso <strong>de</strong>l Active Bat o Cricket,5